异常判定模型生成装置、异常判定装置、异常判定模型生成方法以及异常判定方法与流程
本发明涉及异常判定模型生成装置、异常判定装置、异常判定模型生成方法以及异常判定方法。
背景技术:
1、在车间(plant)设备的状态监视中,通常通过对从该车间设备得到的信号数据设定适当的上下限来判定车间设备的异常。但是,在将阀等一部分的特定机器作为监视对象的情况下,通过提取与机器的特性相应的特征量来进行状态监视。
2、然而,在为了执行一个目的而组合多个要素机器(设备)构成的车间、例如钢铁产品的制造车间等中,在上述那样的状态监视下,存在不充分的情况。例如,在这样的车间中,各设备在很多情况下反复进行相同的动作。因此,需要通过从各个动作模式分别提取信号数据的变化率、最大值、最小值、稳定所需的时间之类的特征量并对提取出的特征量进行管理来监视动作模式。另外,对于动作模式恒定的设备,有时也代替特征量的提取,而通过根据用户的手动作业对动作模式本身设定上下限来监视动作模式,判定异常(例如参照专利文献1)。
3、另一方面,作为从另一个视点考虑的方法,还公知有利用多变量分析的状态监视的方法。例如,公知有对从监视对象的车间设备收集到的多个过程量进行主成分分析并将过程量变换为表示其主要的变化的少数特征量(例如参照专利文献2)。
4、专利文献1:日本特开平10-6028号公报
5、专利文献2:日本特开2001-75642号公报
6、然而,在对从上述那样的监视对象得到的信号数据设定上下限的方法、如专利文献1那样对动作模式设定上下限的方法中,存在以下那样的问题。即,在车间由多个设备构成的情况下,必须对上述多个设备的每一个单独进行上下限的设定,存在人力、成本增大的问题。另一方面,在专利文献2的方法中,不利用时间方向的信息,因此在具有动作模式的设备的状态监视中,存在异常判定的精度下降的情况。
技术实现思路
1、本发明是鉴于上述内容而完成的,目的在于提供能够不知道监视对象的种类等地通用应用、且能够进行高精度的异常判定的异常判定模型生成装置、异常判定装置、异常判定模型生成方法以及异常判定方法。
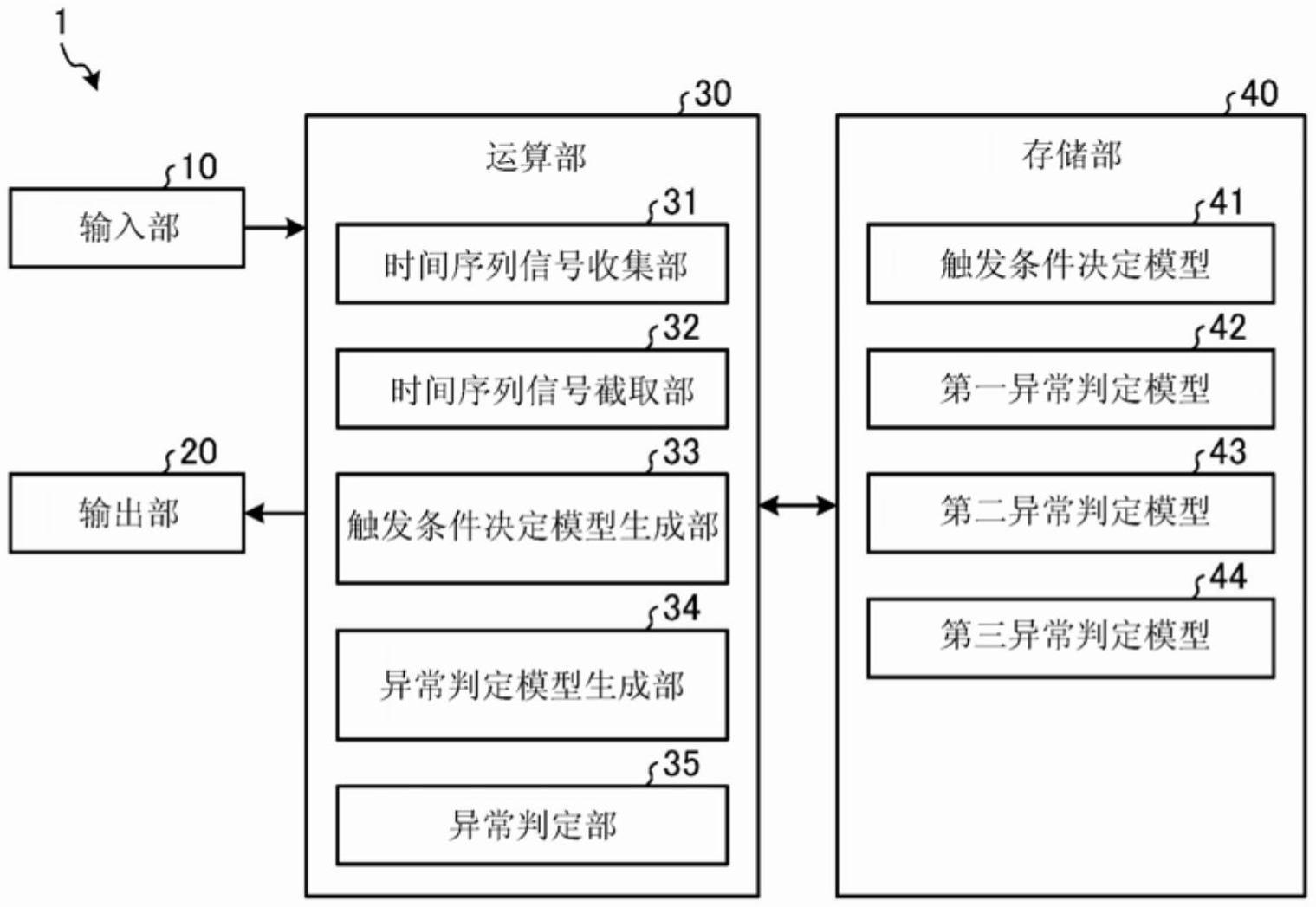
2、为了解决上述的课题、实现目的,本发明所涉及的异常判定模型生成装置为生成对进行规定的动作的设备的异常进行判定的异常判定模型的异常判定模型生成装置,具备:时间序列信号截取单元,在上述设备的正常动作时,从表示上述设备的动作状态的一个以上的时间序列信号进行k次截取;和异常判定模型生成单元,根据由上述时间序列信号截取单元截取出的上述正常动作时的时间序列信号生成上述异常判定模型,对于上述异常判定模型生成单元而言,针对由上述时间序列信号截取单元截取出的上述正常动作时的时间序列信号,使每一次的截取个数为l个,构成由l个变量组成的l维向量,针对l维的变量空间上的k个l维向量,在各变量间的相关的最大值小于规定值的情况下,运算各变量的均值及方差,由此生成第一异常判定模型,针对l维的变量空间上的k个l维向量,在上述各变量间的相关的最大值为规定值以上的情况下,进行主成分分析并运算主成分的变换系数,由此生成第二异常判定模型,在由上述时间序列信号截取单元截取出的上述正常动作时的时间序列信号为m种(m≥2)的情况下,构成由同一时刻的m种变量组成的m维向量,对m维变量空间上的多个m维向量进行主成分分析并运算主成分的变换系数,由此生成第三异常判定模型。
3、另外,本发明所涉及的异常判定模型生成装置是在上述发明的基础上完成的,上述第一异常判定模型及上述第二异常判定模型是在由上述时间序列信号截取单元截取出的上述l维向量的时间序列信号由表示同一动作的信号构成的情况下生成的异常判定模型,上述第三异常判定模型是在由上述时间序列信号截取单元截取出的上述l维向量的时间序列信号不由表示同一动作的信号构成、且具有两个以上的种类(m个种类)的信号的情况下生成的异常判定模型。
4、另外,本发明所涉及的异常判定模型生成装置是在上述发明的基础上完成的,还具备:时间序列信号收集单元,收集表示上述设备的动作状态的时间序列信号和决定从预先确定的监视对象区间截取表示上述动作状态的时间序列信号的条件的触发候选的时间序列信号;和触发条件决定模型生成单元,针对表示上述设备的动作状态的时间序列信号,预先确定想截取的上述监视对象区间的开始时刻,生成使上述开始时刻的标签开启(on)并使除此以外的时刻关闭(off)的标签数据,通过机器学习生成将各时刻的一个以上的上述触发候选的时间序列信号的各值作为输入、将各时刻的上述标签数据作为输出的触发条件决定模型,在上述设备的正常动作时,上述时间序列信号截取单元基于上述触发条件决定模型来从表示上述设备的动作状态的一个以上的时间序列信号进行k次截取。
5、另外,本发明所涉及的异常判定模型生成装置是在上述发明的基础上完成的,上述触发条件决定模型为包括决策树的机器学习模型。
6、为了解决上述的课题、实现目的,本发明所涉及的异常判定装置为对进行规定的动作的设备的异常进行判定的异常判定装置,具备:时间序列信号截取单元,从表示上述设备的动作状态的一个以上的时间序列信号截取异常判定用的时间序列信号;和异常判定单元,使用由上述的异常判定模型生成装置生成的第一异常判定模型、第二异常判定模型及第三异常判定模型中的任一个来根据上述异常判定用的时间序列信号判定上述设备的异常。
7、为了解决上述的课题、实现目的,本发明所涉及的异常判定装置为对进行规定的动作的设备的异常进行判定的异常判定装置,具备:时间序列信号收集单元,收集表示上述设备的动作状态的时间序列信号、和决定从预先确定的监视对象区间截取表示上述动作状态的时间序列信号的条件的触发候选的时间序列信号;时间序列信号截取单元,向由上述的异常判定模型生成装置生成的触发条件决定模型输入上述触发候选的时间序列信号的各时刻的值,针对表示上述设备的动作状态的一个以上的时间序列信号,从触发决定模型的输出开启(on)的时刻起在预先确定的规定期间内截取l个数据,由此截取异常判定用的时间序列信号;以及异常判定单元,使用由上述的异常判定模型生成装置生成的第一异常判定模型、第二异常判定模型、第三异常判定模型中的任一个来根据上述异常判定用的时间序列信号判定上述设备的异常。
8、另外,本发明所涉及的异常判定装置在上述发明的基础上完成的,上述异常判定单元基于规定的期间内上述设备被判定为异常的次数来判定上述设备是否需要维修。
9、为了解决上述的课题、实现目的,本发明所涉及的异常判定模型生成方法为生成对进行规定的动作的设备的异常进行判定的异常判定模型的异常判定模型生成方法,包括:时间序列信号截取工序,在该时间序列信号截取工序中,在上述设备的正常动作时,从表示上述设备的动作状态的一个以上的时间序列信号进行k次截取;和异常判定模型生成工序,在该异常判定模型生成工序中,根据通过上述时间序列信号截取工序截取出的上述正常动作时的时间序列信号生成上述异常判定模型,对于上述异常判定模型生成工序而言,针对通过上述时间序列信号截取工序截取出的上述正常动作时的时间序列信号,使每一次的截取个数为l个,构成由l个变量组成的l维向量,针对l维的变量空间上的k个l维向量,在各变量间的相关的最大值小于规定值的情况下,对各变量的均值及方差进行运算,由此生成第一异常判定模型,针对l维的变量空间上的k个l维向量,在上述各变量间的相关的最大值为规定值以上的情况下,进行主成分分析并运算主成分的变换系数,由此生成第二异常判定模型,在通过上述时间序列信号截取工序截取出的上述正常动作时的时间序列信号为m种(m≥2)的情况下,构成由同一时刻的m种变量组成的m维向量,对m维变量空间上的多个m维向量进行主成分分析并运算主成分的变换系数,由此生成第三异常判定模型。
10、为了解决上述的课题、实现目的,对于本发明所涉及的异常判定模型生成方法而言,上述第一异常判定模型及上述第二异常判定模型是在通过上述时间序列信号截取工序截取出的上述l维向量的时间序列信号由表示同一动作的信号构成的情况下生成的异常判定模型,上述第三异常判定模型是在通过上述时间序列信号截取工序截取出的上述l维向量的时间序列信号不由表示同一动作的信号构成、且具有两个以上的种类(m个种类)的信号的情况下生成的异常判定模型。
11、为了解决上述的课题、实现目的,本发明所涉及的异常判定方法为对进行规定的动作的设备的异常进行判定的异常判定方法,包括:时间序列信号截取工序,在该时间序列信号截取工序中,从表示上述设备的动作状态的一个以上的时间序列截取信号截取异常判定用的时间序列信号;和异常判定工序,在该异常判定工序中,使用通过上述的异常判定模型生成方法生成的第一异常判定模型、第二异常判定模型及第三异常判定模型中的任一个来根据上述异常判定用的时间序列信号判定上述设备的异常。
12、根据本发明,能够不知道监视对象的种类等地通用应用、且能够考虑时间序列数据的模式来进行高精度的异常判定。
- 还没有人留言评论。精彩留言会获得点赞!