一种无人机临时飞行任务的实现方法、设备及存储介质与流程
本发明涉及无人机领域,尤其涉及一种无人机临时飞行任务的实现方法、设备及存储介质。
背景技术:
1、无人机有着较好的高空飞行和作业能力,可以有效的完成人工无法完成的作业,例如高空监控、高空拍摄、远距离投送物品等。近年来无人机在航空拍摄、地质勘探、安防监控等领域都有着广泛的应用。
2、目前的无人机在进行飞行时均是按照预先设置好航线任务后开始起飞,整个飞行过程中都是按照预先设置好的航线去飞行,在飞行过程中只有将无人机停止飞行并删除原有预设航线才能执行新的飞行任务,但是实际运用中,有些临时飞行任务只是需要无人机在短时间内执行的飞行任务,操控者并不希望终止原有的飞行航线。因此上述临时飞行任务在目前无人机飞行控制过程中是无法实现的。
技术实现思路
1、为了克服现有技术的不足,本发明的目的之一在于提供一种无人机临时飞行任务的实现方法,其能解决目前临时飞行任务在无人机飞行控制过程中是无法实现的问题。
2、本发明的目的之二在于提供一种电子设备,其能解决目前临时飞行任务在无人机飞行控制过程中是无法实现的问题。
3、本发明的目的之三在于提供一种计算机可读存储介质,其能解决目前临时飞行任务在无人机飞行控制过程中是无法实现的问题。
4、本发明的目的之一采用以下技术方案实现:
5、一种无人机临时飞行任务的实现方法,所述方法应用于无人机,包括以下步骤:
6、接收用户发送的临时飞行任务指令;
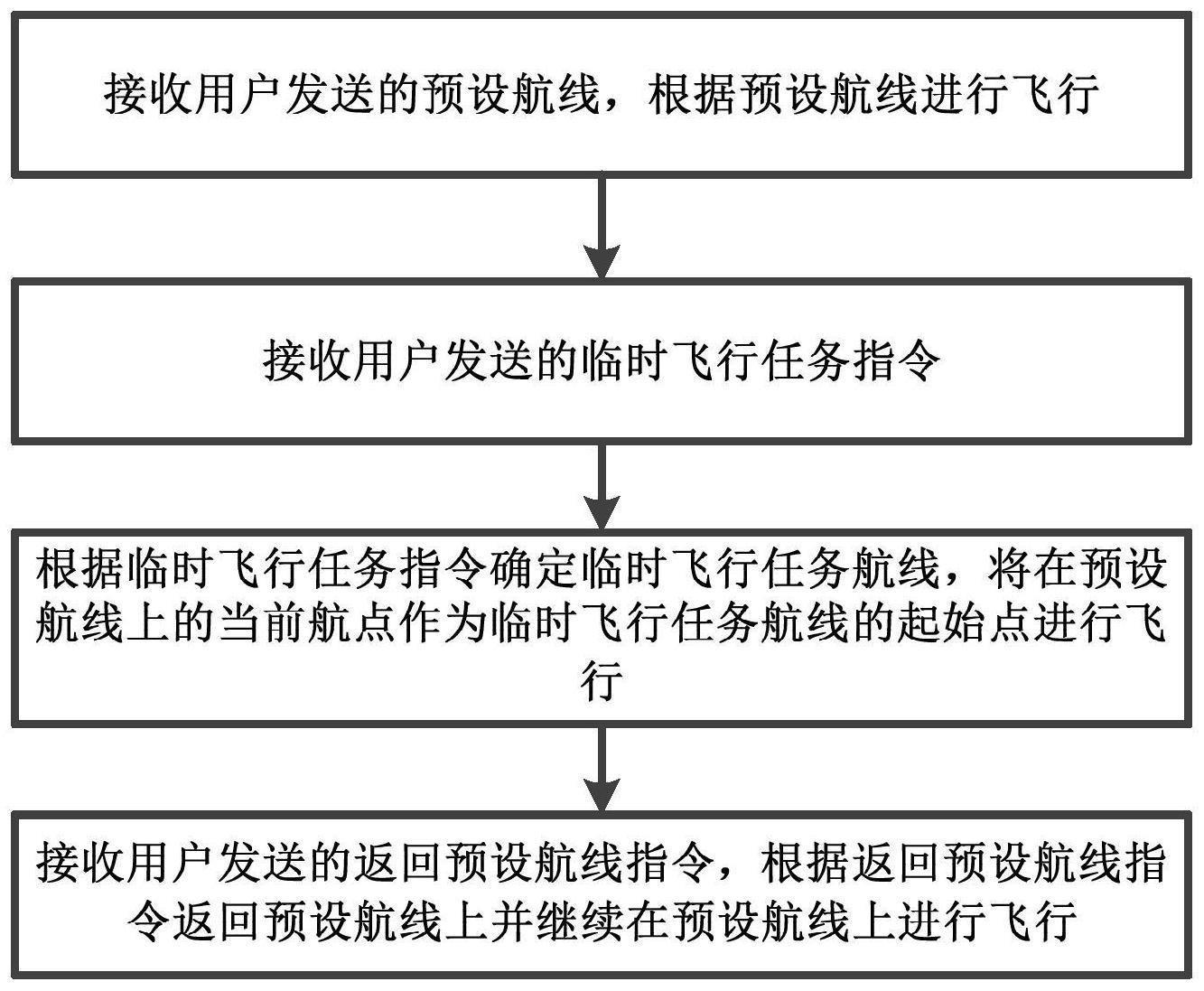
7、根据所述临时飞行任务指令确定临时飞行任务航线,将在预设航线上的当前航点作为所述临时飞行任务航线的起始点进行飞行。
8、进一步地,还包括接收用户发送的返回预设航线指令,根据所述返回预设航线指令返回预设航线上并继续在预设航线上进行飞行。
9、进一步地,所述根据所述返回预设航线指令返回预设航线上并继续在预设航线上进行飞行具体为:根据所述返回预设航线指令获取当前飞行位置,判断所述当前飞行位置是否未超过预设航线上的当前航点,若是,将所述当前航点在预设航线上的前一航点作为返航目标航点,若否,则将所述当前航点作为返航目标航点,制定从所述当前飞行位置飞向所述返航目标航点的返航航线,根据所述返航航线返回至预设航线上的返航目标航点上,将所述返航目标航点作为在预设航线上飞行的起始点继续飞行。
10、进一步地,在所述接收用户发送的临时飞行任务指令还包括:接收用户发送的预设航线,根据所述预设航线进行飞行。
11、进一步地,所述临时飞行任务指令包括飞行策略信息以及飞行参数信息,所述根据所述临时飞行任务指令确定临时飞行任务航线具体为:根据所述飞行策略信息以及飞行参数信息指定临时飞行任务航线。
12、进一步地,所述飞行策略信息为双环绕交叉飞行策略或环绕飞行策略。
13、进一步地,当所述飞行策略信息为双环绕交叉飞行策略时,所述飞行参数信息包括飞行高度、参考点距离、航向角度以及交叉点经纬度;当所述飞行策略信息为环绕飞行策略,则所述飞行参数信息包括飞行高度、飞行半径以及飞行参考点经纬度。
14、进一步地,在确定所述临时飞行任务航线之后,还包括接收用户发送的拍摄角度调整指令,根据所述拍摄角度调整指令调整当前拍摄角度,根据调整后的当前拍摄角度对视野区域进行拍摄。
15、本发明的目的之二采用以下技术方案实现:
16、一种电子设备,包括:处理器;
17、存储器;以及程序,其中所述程序被存储在所述存储器中,并且被配置成由处理器执行,所述程序包括用于执行本申请中所述的一种无人机临时飞行任务的实现方法。
18、本发明的目的之三采用以下技术方案实现:
19、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行本申请中所述的一种无人机临时飞行任务的实现方法。
20、相比现有技术,本发明的有益效果在于:本发明中公开的一种无人机临时飞行任务的实现方法,通过接收用户发送的临时飞行任务指令,根据临时飞行任务指令确定临时飞行任务航线,将在预设航线上的当前航点作为临时飞行任务航线的起始点进行飞行,实现了无人机在原有预设航线上飞行时可以执行临时飞行任务。
21、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种无人机临时飞行任务的实现方法,所述方法应用于无人机,其特征在于:包括以下步骤:
2.如权利要求1所述的一种无人机临时飞行任务的实现方法,其特征在于:还包括接收用户发送的返回预设航线指令,根据所述返回预设航线指令返回预设航线上并继续在预设航线上进行飞行。
3.如权利要求2所述的一种无人机临时飞行任务的实现方法,其特征在于:所述根据所述返回预设航线指令返回预设航线上并继续在预设航线上进行飞行具体为:根据所述返回预设航线指令获取当前飞行位置,判断所述当前飞行位置是否未超过预设航线上的当前航点,若是,将所述当前航点在预设航线上的前一航点作为返航目标航点,若否,则将所述当前航点作为返航目标航点,制定从所述当前飞行位置飞向所述返航目标航点的返航航线,根据所述返航航线返回至预设航线上的返航目标航点上,将所述返航目标航点作为在预设航线上飞行的起始点继续飞行。
4.如权利要求1所述的一种无人机临时飞行任务的实现方法,其特征在于:在所述接收用户发送的临时飞行任务指令之前还包括:接收用户发送的预设航线,根据所述预设航线进行飞行。
5.如权利要求1所述的一种无人机临时飞行任务的实现方法,其特征在于:所述临时飞行任务指令包括飞行策略信息以及飞行参数信息,所述根据所述临时飞行任务指令确定临时飞行任务航线具体为:根据所述飞行策略信息以及飞行参数信息指定临时飞行任务航线。
6.如权利要求5所述的一种无人机临时飞行任务的实现方法,其特征在于:所述飞行策略信息为双环绕交叉飞行策略或环绕飞行策略。
7.如权利要求6所述的一种无人机临时飞行任务的实现方法,其特征在于:当所述飞行策略信息为双环绕交叉飞行策略时,所述飞行参数信息包括飞行高度、参考点距离、航向角度以及交叉点经纬度;当所述飞行策略信息为环绕飞行策略,则所述飞行参数信息包括飞行高度、飞行半径以及飞行参考点经纬度。
8.如权利要求1所述的一种无人机临时飞行任务的实现方法,其特征在于:在确定所述临时飞行任务航线之后,还包括接收用户发送的拍摄角度调整指令,根据所述拍摄角度调整指令调整当前拍摄角度,根据调整后的当前拍摄角度对视野区域进行拍摄。
9.一种电子设备,其特征在于,包括:处理器;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行权利要求1-8中任意一项所述的一种无人机临时飞行任务的实现方法。
技术总结
本发明提供一种无人机临时飞行任务的实现方法,包括接收用户发送的临时飞行任务指令;根据临时飞行任务指令确定临时飞行任务航线,将在预设航线上的当前航点作为临时飞行任务航线的起始点进行飞行。本发明的一种无人机临时飞行任务的实现方法,实现了无人机在原有预设航线上飞行时可以执行临时飞行任务。
技术研发人员:冯银华
受保护的技术使用者:深圳市道通智能航空技术股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!