一种数控机床俯仰误差及偏摆误差辨识方法
1.本发明涉及数控机床制造加工技术领域,具体地,涉及面向机床几何误差测量及角度误差的辨识技术;更具体的,涉及一种数控机床俯仰误差及偏摆误差辨识方法。
背景技术:
2.目前用于机床几何误差测量及辨识的方法种类繁多,有些为减少误差测量点的选择,舍弃了对定位误差的辨识;有些为了获得更多的几何误差辨识数据,针对定位误差和角度误差做了冗余测量及辨识;还有些借助于实际测量距离的线性拟合来获得实际距离与理想距离之间的误差;上述的这些误差测量及辨识方法都是以俯仰误差和偏摆误差的辨识方法为基础建立起来的,但是针对几何误差辨识方法中俯仰及偏摆误差的辨识却一直沿用本世纪初提出的辨识方法,也称为俯仰及偏摆误差的传统辨识方法(下面简称传统方法)。传统方法相对于如今的几何误差测量及辨识已有不少的限制。
3.如公开日为2018.03.16的中国发明专利:基于平面光栅的三面五线机床空间几何误差测量辨识方法所示,其先在xoy、xoz、yoz三个测量平面内,分别在平面光栅的测量范围内设计规划测量路径;然后依次对xoy、xoz、yoz平面的各项误差进行辨识,先辨识得到测量平面上两轴间的垂直度误差,消除垂直度误差影响后利用不同轨迹间关系辨识得到俯仰和偏摆角度误差,消除角度误差影响后辨识得到定位误差与直线度误差,最后结合三个平面辨识得到的已有误差代入模型辨识得到滚转角度误差;对每项几何误差项进行参数化建模,采用正交多项式拟合的方法得到每项几何误差的误差曲线,最终实现空间几何误差的全部辨识过程。传统方法中需要多次测量三条到四条的同一坐标轴平面内的平行线定位误差进行俯仰误差和偏摆误差辨识,还需要选择与坐标系平面相平行的平面进行测量;因此,现有技术的限制比较多,仍具有一定的局限性。
技术实现要素:
4.针对现有技术的局限,本发明提出一种数控机床俯仰误差及偏摆误差辨识方法,本发明采用的技术方案是:
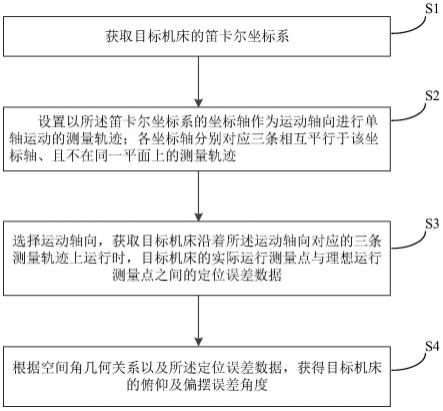
5.一种数控机床俯仰误差及偏摆误差辨识方法,包括以下步骤:
6.s1,获取目标机床的笛卡尔坐标系;
7.s2,设置以所述笛卡尔坐标系的坐标轴作为运动轴向进行单轴运动的测量轨迹;各坐标轴分别对应三条相互平行于该坐标轴、且不在同一平面上的测量轨迹;
8.s3,选择运动轴向,获取目标机床沿着所述运动轴向对应的三条测量轨迹上运行时,目标机床的实际运行测量点与理想运行测量点之间的定位误差数据;
9.s4,根据空间角几何关系以及所述定位误差数据,获得目标机床的俯仰及偏摆误差角度。
10.相较于现有技术,本发明针对传统方法中涉及的轨迹测量及误差辨识进行了改良,方案由三条平行或者重合与机床坐标轴线的可直接测量其定位误差的直线轨迹实现;
可以任意选择被测空间中的运动轨迹,并且每个方向上的测量只需要用到三条轨迹,很大程度上缓解了冗余测量;且可以同时辨识出俯仰误差和偏摆误差,省去了分开计算辨识的重复繁琐。
11.作为一种优选方案,所述测量轨迹包括与坐标轴重合的情况。
12.作为一种优选方案,所述空间角几何关系在于:在所述步骤s3中的三条测量轨迹上分别选择位于同一距离的测量点,将所述测量点连接构成的误差平面的法向量分别投影在所述步骤s3中的运动轴所在的两个笛卡尔坐标平面上,以该运动轴的单位向量与所述法向量在所述笛卡尔坐标平面上的投影向量形成的夹角作为俯仰及偏摆误差角度。
13.进一步的,对于理想运行测量点实际运行测量点实际运行测量点俯仰及偏摆误差角度按以下公式表示:
[0014][0015]
其中,表示理想运行距离,表示实际运行距离;公式字符右上角的角标k表示测量轨迹;公式字符右下角的角标中第一个字母u,v,w表示误差方向,取值为x,y,z;公式字符右下角的角标中第二个字母vi表示运动方向,i表示测量轨迹k上第i个测量点,v取值为x,y,z,i取值1,2,...。
[0016]
更进一步的,在测量轨迹的通用情况中,各组测量轨迹的初始点的距离在所用坐标系中表示为所述俯仰及偏摆误差角度的简化模型按以下公式表示:
[0017][0018]
更进一步的,对于由以下空间坐标的点:a(0,0,0)、b(0,ly,0)、c(-l
x
,ly,0)、d(-l
x
,0,0)、e(0,0,lz)、f(0,ly,lz)、g(-l
x
,ly,lz)、h(-l
x
,0,lz)构成的几何空间,在以所述几何空间的各棱边作为测量轨迹的情况中,所述俯仰及偏摆误差角度的简化模型按以下公式表示:
[0019][0020]
进一步的,的正负号取决于的正负号。
[0021]
本发明还提供以下内容:
[0022]
一种数控机床俯仰误差及偏摆误差辨识系统,包括依序连接的坐标系获取模块、测量轨迹设置模块、定位误差数据获取模块以及误差角度获取模块;其中:
[0023]
所述坐标系获取模块用于获取获取目标机床的笛卡尔坐标系;
[0024]
所述测量轨迹设置模块用于设置以所述笛卡尔坐标系的坐标轴作为运动轴向进行单轴运动的测量轨迹;各坐标轴分别对应三条相互平行于该坐标轴、且不在同一平面上的测量轨迹;
[0025]
所述定位误差数据获取模块用于选择运动轴向,获取目标机床沿着所述运动轴向对应的三条测量轨迹上运行时,目标机床的实际运行测量点与理想运行测量点之间的定位误差数据;
[0026]
所述误差角度获取模块用于根据空间角几何关系以及所述定位误差数据,获得目标机床的俯仰及偏摆误差角度。
[0027]
一种存储介质,其上储存有计算机程序,所述计算机程序被处理器执行时实现前述的数控机床俯仰误差及偏摆误差辨识方法的步骤。
[0028]
一种计算机设备,包括存储介质、处理器以及储存在所述存储介质中并可被所述处理器执行的计算机程序,所述计算机程序被处理器执行时实现前述数控机床俯仰误差及偏摆误差辨识方法的步骤。
附图说明
[0029]
图1为本发明提供的数控机床俯仰误差及偏摆误差辨识方法的流程示意图;
[0030]
图2为本发明提供的数控机床俯仰误差及偏摆误差辨识方法的原理示意图;
[0031]
图3为本发明提供的数控机床俯仰误差及偏摆误差辨识方法的在通用情况下的轨迹示意图;
[0032]
图4为本发明提供的数控机床俯仰误差及偏摆误差辨识方法的在通用情况下的实施数据示意图;
[0033]
图5为本发明提供的数控机床俯仰误差及偏摆误差辨识方法的在特殊情况下的轨迹示意图;
[0034]
图6为本发明提供的数控机床俯仰误差及偏摆误差辨识方法的在特殊情况下的实施数据示意图;
[0035]
图7为本发明提供的数控机床俯仰误差及偏摆误差辨识系统的示意图。
具体实施方式
[0036]
附图仅用于示例性说明,不能理解为对本专利的限制;
[0037]
应当明确,所描述的实施例仅仅是本技术实施例一部分实施例,而不是全部的实施例。基于本技术实施例中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本技术实施例保护的范围。
[0038]
在本技术实施例使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术实施例。在本技术实施例和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
[0039]
下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法
的例子。在本技术的描述中,需要理解的是,术语“第一”、“第二”、“第三”等仅用于区别类似的对象,而不必用于描述特定的顺序或先后次序,也不能理解为指示或暗示相对重要性。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
[0040]
此外,在本技术的描述中,除非另有说明,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。以下结合附图和实施例对本发明做进一步的阐述。
[0041]
为了解决现有技术的局限性,本实施例提供了一种技术方案,下面结合附图和实施例对本发明的技术方案做进一步的说明。
[0042]
实施例1
[0043]
请参考图1,一种数控机床俯仰误差及偏摆误差辨识方法,包括以下步骤:
[0044]
s1,获取目标机床的笛卡尔坐标系;
[0045]
s2,设置以所述笛卡尔坐标系的坐标轴作为运动轴向进行单轴运动的测量轨迹;各坐标轴分别对应三条相互平行于该坐标轴、且不在同一平面上的测量轨迹;
[0046]
s3,选择运动轴向,获取目标机床沿着所述运动轴向对应的三条测量轨迹上运行时,目标机床的实际运行测量点与理想运行测量点之间的定位误差数据;
[0047]
s4,根据空间角几何关系以及所述定位误差数据,获得目标机床的俯仰及偏摆误差角度。
[0048]
相较于现有技术,本发明针对传统方法中涉及的轨迹测量及误差辨识进行了改良,方案由三条平行或者重合与机床坐标轴线的可直接测量其定位误差的直线轨迹实现;可以任意选择被测空间中的运动轨迹,并且每个方向上的测量只需要用到三条轨迹,很大程度上缓解了冗余测量;且可以同时辨识出俯仰误差和偏摆误差,省去了分开计算辨识的重复繁琐。
[0049]
作为一种优选实施例,所述测量轨迹包括与坐标轴重合的情况。
[0050]
具体的,所述定位误差数据利用以下国际标准iso230-2进行检测评判:
[0051]
1、位置偏差为测量仪器所测定位误差等于实际位置p
ij
与目标位置pi之差,即x
ij
=p
ij-pi。
[0052]
2、单向平均位置偏差为在某一点测量n次所计算出的平均偏差,即和
[0053]
3、双向平均位置偏差(描述点)为某一点正向平均位置偏差和负向平均位置偏差的平均值,即
[0054]
4、反向间隙为某一位置的正向平均位置偏差与负向平均位置偏差之差,即
[0055]
5、平均反向间隙为某一点m次反向间隙的平均值,即
[0056]
6、单向重复精度评估值为某一点处位置偏差的标准差,即
和ri↓
=4si↓
(负向)。
[0057]
7、单向位置重复精度(描述点)为某一点处单向重复精度评估值的4倍,即ri↑
=4si↑
(正向)和ri↓
=4si↓
(负向)。
[0058]
8、双向位置重复精度(描述点)ri=max[2si↑
+2si↓
+|bi|;ri↑
;ri↓
]
[0059]
9、双向位置重复精度(描述轴)r=max[ri]
[0060]
10、双向定位系统偏差
[0061]
11、双向平均位置偏差(描述轴)
[0062]
12、双向定位精度(描述轴):
[0063][0064]
作为一种优选实施例,所述空间角几何关系在于:在所述步骤s3中的三条测量轨迹上分别选择位于同一距离的测量点,将所述测量点连接构成的误差平面的法向量分别投影在所述步骤s3中的运动轴所在的两个笛卡尔坐标平面上,以该运动轴的单位向量与所述法向量在所述笛卡尔坐标平面上的投影向量n1、n2形成的夹角作为俯仰及偏摆误差角度。
[0065]
在图2的一种示例中,可以利用激光干涉仪获得3条测量轨迹的定位误差数据,并分别在3条测量轨迹上选择同一距离测量点,将三点连接够成误差平面。将误差平面的法向量n分别投影至y轴所在的两个笛卡尔坐标平面上,分别是xoy平面和yoz平面,其对应的投影向量分别为n1和n2。y轴的单位向量i与n1和n2形成夹角分别为θ
zy
和θ
xy
,则两夹角分别对应y轴的偏摆误差和俯仰误差。
[0066]
请参阅图3或图5,作为一种可选实施例,以1000mm
×
500mm
×
500mm的数控机床几何空间为测量对象,将三轴数控机床工作台前端左下角设置为绝对坐标原点,并以该原点建立笛卡尔坐标系。设置以所述笛卡尔坐标系的坐标轴:x轴、y轴和z轴作为运动轴向进行单轴运动的测量轨迹,得到轨迹1、轨迹2、轨迹3、轨迹4、轨迹5、轨迹6、轨迹7、轨迹8和轨迹9;其中轨迹1、轨迹2和轨迹3为一组,对应x轴;轨迹4、轨迹5和轨迹6为一组,对应y轴;轨迹7、轨迹8和轨迹9为一组,对应z轴;每组三条轨迹相互平行或重合于各自的运动轴,并且运动轨迹可以在被测几何空间中任意选择。
[0067]
进一步的,对于理想运行测量点实际运行测量点实际运行测量点俯仰及偏摆误差角度按以下公式表示:
[0068][0069]
其中,表示理想运行距离,表示实际运行距离;公式字符右上角的角标k表示测量轨迹;公式字符右下角的角标中第一个字母u,v,w表示误差方向,取值为x,y,z;公式字符右下角的角标中第二个字母vi表示运动方向,i表示测量轨迹k上第i个测量点,v取值为x,y,z,i取值1,2,...。
[0070]
更进一步的,的正负号取决于的正负号。
[0071]
更进一步的,在测量轨迹的通用情况中,请参阅图3,各组测量轨迹的初始点的距离在所用坐标系中表示为所述俯仰及偏摆误差角度的简化模型按以下公式表示:
[0072][0073]
具体的,结合实际测量情况以a为原点建立笛卡尔坐标系,在一种示例中,以y轴负向为被测运动方向,获得
④⑤⑥
三条轨迹的定位误差数据,将辨识出的偏摆及俯仰误差数据曲线与实际测量出的偏摆及俯仰误差数据曲线进行对照,如图4所示,实线为实际测量值,虚线为通过辨识模型获得的辨识值,带£标记的为偏摆误差,带
○
标记的为俯仰误差。在偏摆误差上,测量值和辨识值最大差值为0.007μm/mm,在俯仰误差上,测量值和辨识值最大差值为0.022μm/mm。
[0074]
更进一步的,请参阅图5,对于由以下空间坐标的点:a(0,0,0)、b(0,ly,0)、c(-l
x
,ly,0)、d(-l
x
,0,0)、e(0,0,lz)、f(0,ly,lz)、g(-l
x
,ly,lz)、h(-l
x
,0,lz)构成的几何空间,在以所述几何空间的各棱边作为测量轨迹的情况中,所述俯仰及偏摆误差角度的简化模型按以下公式表示:
[0075][0076]
具体的,结合实际测量情况以a为原点建立笛卡尔坐标系,在一种示例中,以y轴负向为被测运动方向,获得
④⑤⑥
三条轨迹的定位误差数据,将辨识出的偏摆及俯仰误差数据曲线与实际测量出的偏摆及俯仰误差数据曲线进行对照,请参阅图6,实线为实际测量值,虚线为通过辨识模型获得的辨识值,带£标记的为偏摆误差,带
○
标记的为俯仰误差。在偏摆误差上,测量值和辨识值最大差值为0.005μm/mm,在俯仰误差上,测量值和辨识值最大差值为0.016μm/mm。
[0077]
实施例2
[0078]
一种数控机床俯仰误差及偏摆误差辨识系统,请参阅图7,包括依序连接的坐标系获取模块1、测量轨迹设置模块2、定位误差数据获取模块3以及误差角度获取模块4;其中:
[0079]
所述坐标系获取模块1用于获取获取目标机床的笛卡尔坐标系;
[0080]
所述测量轨迹设置模块2用于设置以所述笛卡尔坐标系的坐标轴作为运动轴向进行单轴运动的测量轨迹;各坐标轴分别对应三条相互平行于该坐标轴、且不在同一平面上的测量轨迹;
[0081]
所述定位误差数据获取模块3用于选择运动轴向,获取目标机床沿着所述运动轴向对应的三条测量轨迹上运行时,目标机床的实际运行测量点与理想运行测量点之间的定位误差数据;
[0082]
所述误差角度获取模块4用于根据空间角几何关系以及所述定位误差数据,获得目标机床的俯仰及偏摆误差角度。
[0083]
实施例3
[0084]
一种存储介质,其上储存有计算机程序,所述计算机程序被处理器执行时实现实
施例1中的数控机床俯仰误差及偏摆误差辨识方法的步骤。
[0085]
实施例4
[0086]
一种计算机设备,包括存储介质、处理器以及储存在所述存储介质中并可被所述处理器执行的计算机程序,所述计算机程序被处理器执行时实现实施例1中的数控机床俯仰误差及偏摆误差辨识方法的步骤。
[0087]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1