用于盾构隧道弧形件安装机的抗扰同步步态控制方法
1.本发明涉及盾构隧道弧形件安装机控制技术领域,特别涉及一种用于盾构隧道弧形件安装机的抗扰同步步态控制方法。
背景技术:
2.近年来,盾构技术自动化程度逐渐提高,并且具备高效、安全、可靠等特点,已成为隧道施工的主要方法。传统基于现浇式的隧道内部结构施工方法存在施工效率低,工期长,机械自动化程度低等问题,尤其在面向长距离、大直径的盾构隧道更显劣势。随着智能制造、数字化、去碳化等理念和技术的发展,智能装配技术逐渐成为隧道内部结构施工的主要发展趋势。
3.弧形件是隧道内部结构的重要组成部分,位于隧道下部,紧邻管片布置。弧形件的安装质量直接影响整体结构的安装,又因其体积大、结构尺寸大、安装精度要求高等特点,传统利用吊机通过吊装的安装方法已无法满足要求,且会制约施工效率,影响安装精度。具备六自由度的盾构隧道弧形件安装机可以通过步进的方法,在弧形件内行进,降低隧道内复杂的作业环境影响,提高隧道施工效率。
4.申请号为202110948267.3的发明专利公开了一种盾构施工用弧形件安装装置及其安装方法,其解决的是现有弧形件安装装置在盾构隧道内安装弧形件过程中,不能快速、准确的调整弧形件安装姿态,导致安装效率低、安装成本高的技术问题,并未涉及安装机本身的步态控制方法;另外,申请号为202110483888.9的发明专利公开了一种穿行式隧道弧形件安装机,包括其运行机理,可通过其4条支腿的组合动作完成弧形件的安装和精调,但是,其也未涉及弧形件安装机本身的步态控制方法,及内外扰动抑制策略。
技术实现要素:
5.本发明的目的是提供用于盾构隧道弧形件安装机的抗扰同步步态控制方法,解决弧形件安装机的同步步态控制及扰动抑制问题,可以提高弧形件安装机的控制效率和抗扰能力,进一步提高弧形件的安装效率和安全可靠性。
6.本发明解决其技术问题,采用的技术方案是:
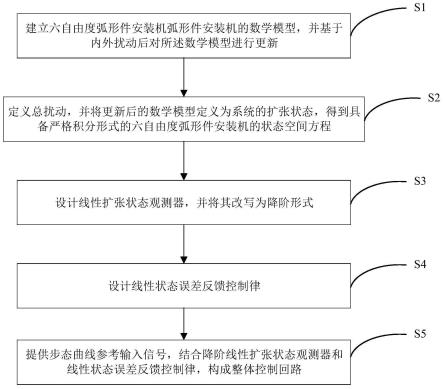
7.用于盾构隧道弧形件安装机的抗扰同步步态控制方法,包括如下步骤:
8.建立弧形件安装机的数学模型,并基于内外扰动后对所述数学模型进行更新;
9.定义总扰动,并将更新后的数学模型定义为系统的扩张状态,得到具备严格积分形式的弧形件安装机的状态空间方程;
10.依据弧形件安装机的状态空间方程,设计线性扩张状态观测器,并将其改写为降阶形式,得到降阶线性扩张状态观测器;
11.设计线性状态误差反馈控制律;
12.提供步态曲线参考输入信号,结合降阶线性扩张状态观测器和线性状态误差反馈控制律,构成整体控制回路。
13.作为优选,所述弧形件安装机为六自由度弧形件安装机。
14.作为优选,所述建立的六自由度弧形件安装机的数学模型为:
[0015][0016]
其中:
[0017][0018][0019]
g(q)=[g1,g2,g3,g4,g5,g6]
t
[0020]
其中,q=[q1,q2,q3,q4,q5,q6]
t
表示六自由度弧形件安装机的油缸位移,表示六自由度弧形件安装机的油缸速度,表示六自由度弧形件安装机的油缸加速度,τ=[τ1,τ2,τ3,τ4,τ5,τ6]
t
表示油缸输入力矩,m(q)表示弧形件安装机的惯性矩阵,表示科氏力和向心力矩阵,g(q)为重力矩阵。
[0021]
作为优选,所述基于内外扰动后对所述数学模型进行更新的过程为:
[0022]
首先更新为:
[0023][0024]
其中,
△
m,
△
c和
△
g表示系统内部参数摄动,d(t)表示系统外部时变扰动;
[0025]
然后变形为:
[0026][0027]
其中,
[0028]
最后得:
[0029][0030]
作为优选,所述定义的总扰动为:
[0031][0032]
作为优选,所述将更新后的数学模型定义为系统的扩张状态,得到具备严格积分形式的弧形件安装机的状态空间方程为:
[0033][0034]
其中,x1=q,x3=f(t),b0表示控制增益,u表示待设计控制器。
[0035]
作为优选,依据弧形件安装机的状态空间方程(6),所述设计的线性扩张状态观测器首先描述为:
[0036][0037]
其中,分别表示对x1,x2和x3的观测量,l1,l2和l3为观测器增益,重新将线性扩张状态观测器描述为:
[0038][0039]
其中,l=[l1,l2,l3]
t
;
[0040]
最后,得到针对六自由度弧形件安装机的线性扩张状态观测器为:
[0041][0042]
作为优选,将设计线性扩张状态观测器改写为降阶形式的过程为:
[0043]
首先,线性扩张状态观测器的降维形式初步为:
[0044][0045]
其次,为求解采用间接法,上式改写为:
[0046][0047]
然后,引入变量η2和η3,令
[0048][0049]
则式(11)改写为:
[0050][0051]
进一步可得:
[0052][0053]
其中,η2+l2y为速度信号的估计,η3+l3y为总扰动的估计,完成对的求解然后,将式(10)进行改写为式(15),即降阶线性扩张状态观测器:
[0054][0055]
其中,然后,根据极点配置法,将式(15)特征方程的极点放置于-wo处,则有:
[0056][0057]
其中,λ(s)表示式(15)的特征方程,s表示特征根,i表示单位矩阵。最后,由(16)得到:l2=2wo,l3=w
o2
,wo表示观测器的带宽,且仅与观测器增益相关。
[0058]
作为优选,所述设计的线性状态误差反馈控制律为:
[0059][0060]
其中,r为参考输入信号,k
p
和kd为比例和微分增益,根据带宽法,将控制器带宽置于-wc处,可得k
p
=w
c2
,kd=2wc,wc表示线性状态误差反馈控制器的带宽,且仅与比例、微分增益相关。
[0061]
作为优选,所述提供的步态曲线参考输入信号,具体是指根据预先设定好的步态曲线,并将其作为六自由度弧形件安装机的参考输入信号。
[0062]
本发明的有益效果是,通过上述用于盾构隧道弧形件安装机的抗扰同步步态控制方法,可以使用降阶线性扩张状态观测器,以直接利用安装机油缸可观测的位移信号,结合线性状态误差反馈控制律构成控制策略,与传统的自抗扰控制相比,本发明的控制方法结构更加简单,参数更少,在保证控制精度和抗扰能力的同时能更有效利用可观测信息,因此,本发明可以有效提升弧形件安装机的控制性能和扰动抑制能力。
附图说明
[0063]
图1为本发明实施例中用于盾构隧道弧形件安装机的抗扰同步步态控制方法;
[0064]
图2为本发明实施例中同步步态控制框图。
具体实施方式
[0065]
下面结合附图及实施例,详细描述本发明的技术方案。
[0066]
实施例
[0067]
本实施例针对的是用于盾构隧道六自由度弧形件安装机的抗干扰同步步态控制方法,参见图1,其为本实施例流程图,该方法包括如下步骤:
[0068]
s1.建立六自由度弧形件安装机弧形件安装机的数学模型,并基于内外扰动后对所述数学模型进行更新;
[0069]
s2.定义总扰动,并将更新后的数学模型定义为系统的扩张状态,得到具备严格积分形式的六自由度弧形件安装机的状态空间方程;
[0070]
s3.依据弧形件安装机的状态空间方程,设计线性扩张状态观测器,并将其改写为降阶形式,得到降阶线性扩张状态观测器;
[0071]
s4.设计线性状态误差反馈控制律;
[0072]
s5.提供步态曲线参考输入信号,结合降阶线性扩张状态观测器(15)和线性状态误差反馈控制律(17),构成整体控制回路。
[0073]
具体而言,本实施例中,建立的六自由度弧形件安装机的数学模型为:
[0074][0075]
其中:
[0076][0077][0078]
g(q)=[g1,g2,g3,g4,g5,g6]
t
[0079]
其中,q=[q1,q2,q3,q4,q5,q6]
t
表示六自由度弧形件安装机的油缸位移,表示六自由度弧形件安装机的油缸速度,表示六自由度弧形件安装机的油缸加速度,τ=[τ1,τ2,τ3,τ4,τ5,τ6]
t
表示油缸输入力矩,m(q)表示弧形件安装机的惯性矩阵,表示科氏力和向心力矩阵,g(q)为重力矩阵。
[0080]
需要说明的是,考虑到各类扰动,包括外部时变干扰和内部参数摄动,可初步得到六自由度弧形件安装机的数学模型:
[0081][0082]
其中,
△
m,
△
c和
△
g表示系统内部参数摄动,d(t)表示系统外部时变扰动;
[0083]
然后变形为:
[0084][0085]
其中,
[0086]
最后得:
[0087][0088]
需要指出的是,本实施例中定义的总扰动为:
[0089][0090]
当定义完上述总扰动后,将更新后的数学模型定义为系统的扩张状态,得到具备严格积分形式的度弧形件安装机的状态空间方程为:
[0091]
[0092]
其中,x1=q,x3=f(t),b0表示控制增益,u表示待设计控制器。
[0093]
这里,设计的线性扩张状态观测器首先描述为:
[0094][0095]
其中,分别表示对x1,x2和x3的观测量,l1,l2和l3为观测器增益,重新将线性扩张状态观测器描述为:
[0096][0097]
其中,l=[l1,l2,l3]
t
;最后,得到针对六自由度弧形件安装机的线性扩张状态观测器为:
[0098][0099]
进一步,将设计线性扩张状态观测器改写为降阶形式的过程为:
[0100]
首先,线性扩张状态观测器的降维形式初步为:
[0101][0102]
其次,为求解采用间接法,上式改写为:
[0103]
[0104]
然后,引入变量η2和η3,令
[0105][0106]
则式(11)改写为:
[0107][0108]
进一步可得:
[0109][0110]
其中,η2+l2y为速度信号的估计,η3+l3y为总扰动的估计,完成对的求解。
[0111]
然后,将式(10)进行改写为式(15),即降阶线性扩张状态观测器:
[0112][0113]
其中,然后,根据极点配置法,将式(15)特征方程的极点放置于-wo处,则有:
[0114][0115]
其中,λ(s)表示式(15)的特征方程,s表示特征根,i表示单位矩阵。最后,由(16)得到:l2=2wo,l3=w
o2
,wo表示观测器的带宽,且仅与观测器增益相关。
[0116]
本实施例中,上述设计的线性状态误差反馈控制律为:
[0117][0118]
其中,r为参考输入信号,k
p
和kd为比例和微分增益,根据带宽法,将控制器带宽置于-wc处,可得k
p
=w
c2
,kd=2wc,wc表示线性状态误差反馈控制器的带宽,且仅与比例、微分增益相关。
[0119]
结合上述步骤,本实施例最终可以根据预先设定好的步态曲线,将其作为六自由度弧形件安装机的参考输入信号,结合降阶线性扩张状态观测器和线性状态反馈控制律,构成整体控制回路,其同步步态控制框图如图2所示。
[0120]
因此,通过本实施例的上述方法,首先建立6自由度弧形件安装机的数学模型,进一步考虑内外扰动在内的总扰动后改写为具备严格积分行为的状态空间模型,然后将总扰动定义为系统的扩张状态,涉及线性扩张状态观测器实时在线观测系统的所有状态,进一步直接利用油缸位移信号,涉及降阶线性扩张状态观测器,结合线性状态反馈控制律构成整体控制回路。因此,本实施例的方法能够提高弧形件安装机的控制性能和扰动抑制能力,进一步提升弧形件的安装效率和安全可靠性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1