用于航天器编队与星群操作控制的数值仿真系统及方法
本发明属于编队与星群航天器轨道控制仿真,特别涉及一种用于航天器编队与星群操作控制的数值仿真系统及方法。
背景技术:
1、随着现代航天科技的快速进步与发展,航天器小型化、模块化的理念与实现日趋成熟,具有质量轻、成本低、研制周期短、可靠性高、便于发射等优点的微纳型航天器获得诸多航天大国的高度重视。由多颗功能相同或不同的微小型航天器近距离编队飞行构建成为“虚拟航天器”,并利用星间相互通信与任务协同可使其具备大型航天器的功能,甚至可以实现后者现阶段无法完成的复杂任务。航天器编队与星群飞行在科学探测、物理试验、电子侦察等重要科研领域具有广泛的应用前景。
2、为了快速验证编队与星群飞行任务中多航天器在导航、制导、控制及推力分系统功能的整体可靠性、准确性、兼容性,保证项目在前期规划、中期分析、后期验证等进程的顺利展开,迫切需求开发一种集导航、制导、控制与推力分系统进行统一数值仿真的软件系统及方法。
技术实现思路
1、本发明的目的在于提供一种用于航天器编队与星群操作控制的数值仿真系统及方法。
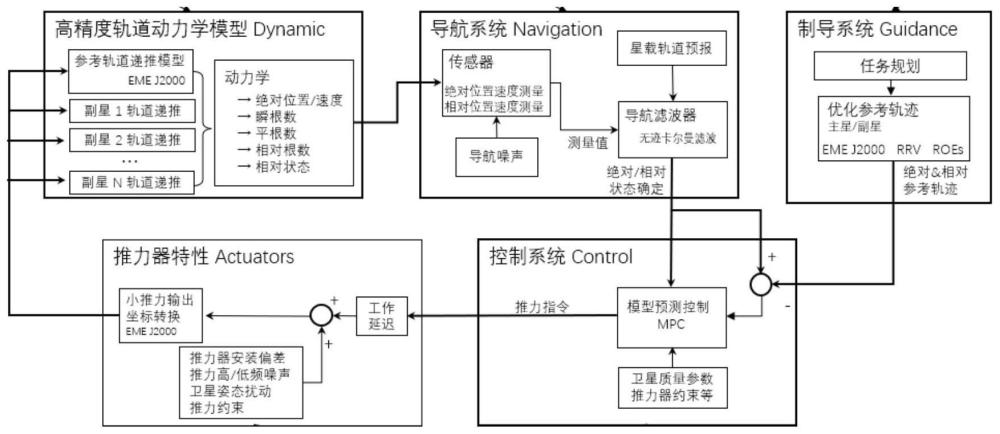
2、实现本发明目的的技术解决方案为:一种用于航天器编队与星群操作控制的数值仿真系统,所述数值仿真系统包括参数设置模块、高精度轨道动力学模块、导航模块、制导模块、控制模块、推力器模块和参数输出模块;
3、所述参数设置模块,用于设置数值仿真系统中各模块所需常量、变量及数据库数据;
4、所述高精度轨道动力学模块,用于实现航天器高精度的轨道积分计算获得编队星群中绝对轨道位置速度状态,并实现多种绝对与相对轨道数据的转换;
5、所述导航模块,用于模拟编队与星群中各航天器接收一系列传感器的绝对或相对定位信号并实现滤波定位;
6、所述制导模块,用于控制任务模式,并为编队与星群中各航天器的控制模块提供随时间变化的理想跟随轨道状态;
7、所述控制模块,用于基于导航与制导信息为编队与星群中各航天器提供满足约束条件的理论控制输出;
8、所述推力器模块,用于模拟实际推力器的推力输出情况;
9、所述参数输出模块,用于设置仿真结果输出情况。
10、进一步地,所述参数设置模块包括航天器基础参数设置单元,高精度轨道动力学模块参数设置单元、导航模块参数设置单元,制导模块参数设置单元,控制模块参数设置单元,推力器模块参数设置单元和输出参数要求设置单元;
11、所述航天器基础参数设置单元,用于输入编队与星群中各航天器的基本特征参数,包括航天器数量、各航天器初始绝对轨道状态、各航天器质量参数、各航天器迎风面积、各航天器阻力系数、各航天器光压面积和各航天器发动机推力布置参数;
12、所述高精度轨道动力学模块参数设置单元,用于输入高精度轨道动力学所需参数,包括高阶地球引力摄动参数,是否考虑地球极轴漂移章动判断标志,是否考虑三体摄动判断标志,是否考虑太阳光压判断标志,是否考虑大气阻力模型判断标志,以及初始任务仿真时间;
13、所述导航模块参数设置单元,用于输入导航模块计算参数,包括绝对定位及相对定位选择标志,绝对定位噪声参数,相对定位噪声参数以及绝对或相对无迹卡尔曼滤波器参数;
14、所述制导模块参数设置单元,用于输入制导模块计算参数,包括轨迹优化算法参数和理想轨迹状态;
15、所述控制模块参数设置单元,用于输入控制模块计算参数,包括主航天器绝对控制参数,模型预测控制参数,推力器缺省参数,推力器幅值约束参数以及防碰撞约束参数;
16、所述推力器模块参数设置单元,用于输入各航天器推力模块计算参数,包括推力器配置参数,推力器幅值参数,系统延迟参数,推力器噪声参数,推力器固定安装偏差,以及航天器姿态扰动参数等;
17、所述输出参数要求设置单元,用于设置仿真系统输出数据参数,包括数据时间间隔,以及输出参数种类。
18、进一步地,所述高精度轨道动力学模块,包括高阶地球引力加速度计算单元,地球坐标系转移矩阵计算单元、太阳月球三体摄动计算单元、大气阻力摄动计算单元以及推力器控制力引入单元,积分运算单元,以及基础轨道参数转换单元;
19、所述高阶地球引力加速度计算单元,用于计算航天器在地球轨道中受到高阶地球非球性引力的加速度;
20、所述地球坐标系转移矩阵计算单元,用于计算在系统中任务仿真时间点的地球惯性坐标系到地心坐标系的转移矩阵;
21、所述太阳月球三体摄动计算单元,用于计算太阳、月球对航天器作用在地球运行轨道中的万有引力加速度;
22、所述大气阻力摄动计算单元,用于计算航天器在地球运行轨道中受到的空气阻力引起的加速度;
23、所述推力器控制力引入单元,用于引入仿真系统在推力器模块提供的推力对航天器产生的加速度;
24、所述积分运算模块,用于根据航天器实时绝对位置速度状态及各种加速度,积分计算下一时刻的绝对位置与速度状态;
25、所述基础轨道参数转换单元,用于将各航天器绝对轨道位置速度状态转换成绝对轨道瞬时根数,绝对轨道平均根数,相对轨道位置速度状态,以及相对轨道根数等。
26、进一步地,所述导航模块,包括绝对导航数值模拟单元,相对导航数值模拟单元,绝对导航滤波单元,相对导航滤波单元,以及轨道预报单元;
27、所述绝对导航数值模拟单元,用于模拟全球导航系统或全球定位系统对各航天器的绝对位置与速度的测量数据信息;
28、所述相对导航数值模拟单元,用于模拟相对光学相机、激光雷达、微波雷达测距测角信息的相对位置与速度的测量数据信息;
29、所述绝对导航滤波单元,用于通过无迹卡尔曼滤波算法实现绝对轨道位置与速度测量数据的滤波确定;
30、所述相对导航滤波单元,用于通过无迹卡尔曼滤波算法实现相对轨道位置与速度测量数据的滤波确定;
31、所述轨道预报单元,用于模拟星载短期绝对轨道位置速度与相对轨道位置速度的预报,其输出数据将作为绝对导航滤波模块及相对导航滤波模块的状态预估数据来源。
32、进一步地,所述制导模块,包括任务模式控制单元和标称轨迹计算单元;
33、所述任务模式控制单元,用于监控、纪律与更迭仿真系统任务模式,并据此将标识信号传输于标称轨迹计算单元;
34、所述标称轨迹计算单元,用于接收标称轨迹数据并传输至控制模块;
35、所述控制模块包括动力学约束计算单元,参考航天器绝对轨道控制计算单元和副星航天器相对轨道控制计算单元;
36、所述动力学约束计算单元,用于提供控制计算推力器缺省、推力器幅值约束及防碰撞约束的约束条件,为参考航天器绝对轨道控制计算单元与相对轨道控制单元提供动力学约束参数;
37、所述参考航天器绝对轨道控制计算单元,用于计算参考航天器在动力学约束条件与标称轨迹导引下的最优加速度及推力;
38、所述副星航天器相对轨道控制计算单元,用于计算副星航天器在动力学约束条件与标称轨迹导引下的最优加速度及推力。
39、进一步地,所述推力器模块,包括系统延迟模拟单元,推力器噪声拟合单元、推力器幅值约束单元、固定装配误差设置单元以及航天器姿态扰动单元;
40、所述系统延迟模拟单元,用于模拟各航天器导航系统、制导系统、控制系统、信号传输以及推力器响应的延迟特性;
41、所述推力器噪声拟合单元,用于模拟各航天器推力器输出推力的高频噪声与低频噪声;
42、所述推力器幅值约束单元,用于约束推力器输出的幅值;
43、所述固定装配误差设置单元,用于模拟推力器的装配角度;
44、所述航天器姿态扰动单元,用于计算航天器的姿态扰动情况。
45、进一步地,所述参数输出模块,包括参数数据库单元和参数数据图像单元;
46、所述参数数据库单元,用于将仿真过程的实时数据以设置时间间隔导入数据库;
47、所述参数数据图像单元,用于将特定需求数据以图像的形式显示并保存至工作文件夹中。
48、基于所述系统的用于航天器编队与星群操作控制的数值仿真方法,包括以下步骤:
49、步骤1,设置所述参数设置模块中要求的全部参数;
50、步骤2,系统运行后,对参数设置情况进行逐一筛查,若筛查出错会重新进入代码设置界面并告知问题错误内容,筛查通过后进入下一步;
51、步骤3,参数设置模块根据仿真参数设置判断导入数据库类型,并导入指定数据库中仿真需要的数据,建立运算数据库以便系统进行运算;
52、步骤4,高精度轨道动力学模块根据航天器绝对轨道位置速度状态数据计算各航天器受到地球引力加速度、空气阻力产生的加速度及推力器输出的加速度,通过积分运算单元进行动力学积分运算获得下一步时间的绝对轨道位置速度状态,同时据此计算各航天器瞬时根数、平根数、相对位置速度状态、相对轨道根数;
53、步骤5,导航模块根据导航模块参数,判断是进行绝对导航还是相对导航,当判定为绝对导航定位时,进入步骤6,当判定为相对导航定位时,进入步骤7;
54、步骤6,导航模块的绝对导航数值模拟单元,对绝对轨道位置速度状态施加绝对传感器特征参数的测量噪声,模拟绝对轨道定位测量信息,利用轨道预报单元辅助无迹卡尔曼滤波确定绝对位置速度状态,并计算滤波后各航天器瞬时根数、平根数、相对位置速度状态、相对轨道根数,为控制系统实现高精度相对轨道控制提供输入相对定位数据;
55、步骤7,导航模块的相对导航数值模拟单元,对相对轨道位置速度状态施加相对传感器特征参数的测量噪声,模拟相对轨道定位测量信息,利用轨道预报单元辅助无迹卡尔曼滤波确定相对位置速度数据,并据此计算相对轨道根数为控制系统实现高精度相对轨道控制提供输入相对位置速度数据;
56、步骤8,制导模块的任务模式控制单元判断此时的任务状态,计算是否需要做出任务更迭或者任务维持;
57、步骤9,系统制导模块的标称轨迹计算单元根据接受任务模式控制单元标识信号后,提取相应任务数据库中的标称轨迹数据提供给控制模块;
58、步骤10,控制模块的动力学约束计算单元,根据参数设置计算推力器缺省、推力器幅值约束及防碰撞约束的约束条件,为参考航天器绝对轨道控制计算单元与相对轨道控制单元提供动力学约束参数;
59、步骤11,控制模块的参考航天器绝对轨道控制计算单元,计算参考航天器在动力学约束条件与标称轨迹导引下的加速度及推力;
60、步骤12,控制模块的副星航天器相对轨道控制计算单元,基于模型预测控制算法计算副星航天器在动力学约束条件与标称轨迹导引下的加速度及推力;
61、步骤13,推力器模块的系统延迟模拟单元,实时计算模拟各航天器导航系统、制导系统、控制系统、信号传输以及推力器响应的延迟特性,并将其反馈至推力器输出;
62、步骤14,推力器模块的推力器噪声拟合单元,实时计算模拟各航天器推力器输出推力的高频噪声与低频噪声,并将其施加在推力器输出上;
63、步骤15,推力器模块的推力器幅值约束单元,约束推力器输出的幅值,使模拟输出不大于实际工程选型推力器的最大输出值;
64、步骤16,推力器模块的固定装配误差设置单元模拟推力器的装配角度,计算推力转换矩阵,施加在推力输出值上;
65、步骤17,推力器模块的航天器姿态扰动单元,计算航天器的姿态扰动参数,计算推力转换矩阵,施加在推力输出值上;
66、步骤18,基于步骤17的推力输出值计算获得各航天器加速度值,并经过坐标转换传输至步骤4中,实现系统闭环。
67、本发明与现有技术相比,其显著优点为:1)该系统可以同时实现编队与星群任务多颗航天器的高精度轨道递推积分计算,包括地球非球性摄动,三体摄动,大气阻力,推力系统的推力加速度等;2)该系统的高精度轨道动力学模块、导航模块、制导模块、控制模块与推力器模块,均可根据实际需求,通过参数设置模块定义各个模块的运行参数,实现导航、制导与控制具体参数的研究工作,以及航天任务的整体数值仿真工作等;3)该系统具有极高的兼容性,可依据初始参数自行判断编队航天器数量,无需更改内部软件框架,非常适用于编队与星群航天任务中多航天器的任务仿真;4)该系统内含大量基础计算模块,可提供多种类型的仿真结果输出,为研究人员提供详细的过程数据,以便研究人员开展对某一参数或模块特性的研究工作;5)该系统在最大程度上实现了航天器编队与星群操作控制中包含导航、制导、控制与推力等分系统的整套闭环系统的模拟仿真,各模块算法均采用目前先进的计算方法,例如包含先进的无迹卡尔曼滤波算法的导航模块,包含模型预测控制的控制模块等;6)该系统的推力器模块充分考虑了实际推力器工作时推力误差产生的来源,为判断推力器性能能否满足任务需求,进行推力器选型比对,验证推力器特性对导航制导与控制系统的匹配情况提供了重要的仿真依据;7)该系统可按实际仿真参数构建运算所需的数据库,提高整体仿真的效率与计算速度。
68、下面结合附图对本发明作进一步详细描述。
- 还没有人留言评论。精彩留言会获得点赞!