一种卷盘式喷灌牵引车作业速度智能控制系统
1.本发明涉及有关农业节水灌溉领域,针对现有卷盘式喷灌机在灌水量控制方 面的问题,发明了一种卷盘式喷灌牵引车作业速度智能控制系统。
背景技术:
2.卷盘式喷灌机是一种可以连续移动喷洒作业的高效节水灌溉装备,具有节水 省工、灌溉均匀、机动灵活等特点,比较适应我国耕地分布的特点。
3.现有卷盘式喷灌机多采用水涡轮驱动,在灌水量控制方面存在较大的误差, 部分卷盘式喷灌机采用电机代替水涡轮驱动,通过对牵引车牵引速度的调节,可 以调节灌溉水量,但仍没有结合作物生长规律和土壤墒情。卷盘式喷灌机在实际 应用中牵引车牵引速度比较随机,无法与作物缺水量匹配。在泵流量不变的情况 下,牵引速度过快导会致灌水量小,灌溉不足;牵引速度过慢导致灌水量大,会 导致灌溉水深层渗漏,浪费水资源。针对以上问题,采用模糊控制的方法,通过 土壤墒情决策卷盘式喷灌牵引车行走速度,进而控制灌水量。目前,尚未发现通 过土壤墒情决策卷盘式喷灌牵引车行走速度的文献报道。
技术实现要素:
4.针对现有技术中对卷盘式喷灌机牵引车牵引速度的控制比较随机导致灌水 量与作物缺水量不匹配的问题,本发明提出一种卷盘式喷灌牵引车作业速度智能 控制系统。
5.本发明是通过以下技术手段实现上述技术目的的。
6.一种卷盘式喷灌牵引车作业速度智能控制系统,包括土壤墒情检测模块、 lora无线传输模块、stm32单片机模块、gprs无线传输模块、lcd交互模块、手 机app客户端、继电器、水泵、无刷直流电机、无刷直流电机驱动器。所述土壤 墒情检测模块通过rs485接口与所述lora无线传输模块连接;所述stm32单片 机模块通过串口与所述lcd交互模块、所述gprs无线传输模块、所述lora无线 传输模块连接,还通过i/o口与所述继电器、所述无刷直流电机驱动器连接;所 述gprs无线传输模块与所述手机app客户端进行通讯;所述继电器与所述水泵 连接;所述无刷直流电机驱动器与所述无刷直流电机连接。
7.进一步,所述stm32单片机模块包括信息处理单元、pwm输出单元及报警监 测单元,信息处理单元通过模糊控制计算卷盘式喷灌牵引车行走速度;所述pwm 输出单元与无刷直流电机控制器、无刷直流电机组成速度控制器,调整无刷直流 电机转速以适应计算出的卷盘式喷灌牵引车行走速度;所述报警监测单元是当土 壤湿度低于土壤湿度阈值时,就会发生报警提醒用户。
8.所述信息处理单元将检测到的土壤湿度值(这里指土壤容积含水量)与达到 田间持水量的所需的土壤湿度值(这里指土壤田间持水量,一般为25%)的偏差 e以及一天内偏差变化率ec作为模糊控制输入量,所需的牵引车牵引速度u作 为模糊控制输出量。设定模糊控制输入量的模糊集合均为{vl,lo,md,hi,vh}, 其中e的基本论域为[0,a],ec的基本论域[0,b],0<a、b<1,a和b的大小分别 由土壤特征和天气状况决定。输出量的模糊集合为
{vl,lo,md,hi,vh},其u 的论域设为[c,d],其中c和d为卷盘式喷灌机牵引车所需的最低和最高牵引速度。.
[0009]
制定模糊规则,根据灌溉系统的灌溉原则,水泵流量一定时,当土壤湿度偏 差值大和土壤湿度偏差变化率大时,要进行大量灌水,即卷盘式喷灌机牵引车应 低速行走;土壤湿度偏差值小和土壤湿度偏差变化率小时,要进行少量灌水,即 卷盘式喷灌机牵引车应高速行走。模糊规则如下:
[0010][0011]
解模糊就得到牵引车所需的行走速度的真实值。
[0012]
一种卷盘式喷灌牵引车作业速度智能控制系统,包括以下步骤:
[0013]
1.所述土壤墒情监测模块将检测到的土壤湿度值通过lora无线传输模块 传送给stm32单片机,当土壤湿度低于阈值时启动报警并通过gprs无线传输模 块传输到手机app客户端。
[0014]
2.用户通过lcd交互模块,控制继电器打开水泵。
[0015]
3.所述信息处理单元通过土壤湿度计算卷盘式喷灌牵引车行走速度,所述 pwm信号单元输出pwm信号通过所述无刷直流电机驱动器驱动所述无刷直流电机, 控制牵引车行走速度进行灌溉。
[0016]
本发明一种卷盘式喷灌牵引车作业速度智能控制系统的有益效果在于:通过 实时监测土壤湿度进行灌溉预警并智能化控制卷盘式喷灌牵引车作业速度,即以 土壤湿度偏差值和一天内土壤湿度偏差变化率为输入量通过模糊控制决策智能 控制卷盘式喷灌机牵引车行走作业速度,能够结合作物生长规律和土壤墒情决定 并调节作物所需的灌溉水量,确保卷盘式喷灌机的灌水量和作物缺水量一致,既 确保了作物正常生长实时所需的水量,又能防止水资源的浪费。
附图说明
[0017]
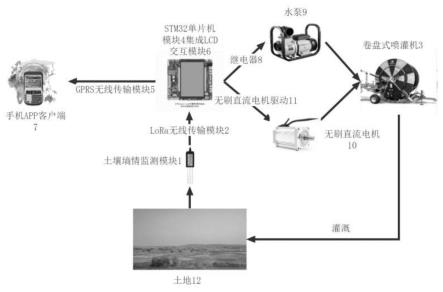
图1为本发明所述控制系统原理图
[0018]
图2为本发明所述lcd交互模块界面
[0019]
图3为土壤湿度偏差值e的隶属函数
[0020]
图4为一天内偏差变化率ec的隶属函数
[0021]
图5为牵引车作业牵引速度u的隶属函数
具体实施方式
[0022]
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范 围并不限于此。
[0023]
一种卷盘式喷灌牵引车作业速度智能控制系统原理如图1所示,包括土壤墒 情检测模块1、lora无线传输模块2、卷盘式喷灌机3、stm32单片机模块4、gprs 无线传输模块5、lcd交互模块6、手机app客户端7、继电器8、水泵9、无刷 直流电机10、无刷直流电机驱动器11、土地12。stm32单片机模块采用 stm32f03zte6作为主控芯片,stm32单片机模块4通过usart串口与gprs无线 传输模块5、lora无线传输模块2、lcd交互模块6连接,还通过i/o口与继电 器8和无刷直流电机驱动器11连接;gprs无线传输模块5与手机app客户端通 讯;土壤墒情检测模块通过rs485接口与lora无线传输模块连接,土壤墒情检 测模块1实时监测灌溉单元的土壤湿度并通过lora无线传输模块2传输至stm32 单片机模块4,当土壤湿度低于设定的土壤湿度阈值时,报警监测单元通过gprs 无线传输模块5上传到手机app客户端7;lcd交互模块6界面如图2所示,stm32 单片机模块4开机后完成初始化,lcd交互模块6上实时显示各个灌溉单元的土 壤湿度值;继电器8与水泵9连接,用户将卷盘式喷灌机牵引车拉至田间另一端 后,选择需要灌溉的灌溉单元,并开启水泵。信息处理单元对土壤湿度进行模糊 处理的过程如下:
[0024]
模糊控制以土壤湿度偏差值e和一天内偏差变化率ec作为系统的输入量, 牵引车工作牵引速度u为输出量。以某种作物为例,田间持水量取25%,作物凋 萎系数为田间持水量的70%,本文取18%,作物根系活动范围在0~40cm土层, 灌溉水利用系数取0.8,由公式(1)可以计算最大灌水定额为35mm,公式如下:
[0025]
m=0.1zp(β
max-β
min
)/η
ꢀꢀꢀꢀ
(1)
[0026]
式中m—一次灌水量,mm;z—计划土壤湿润层深度,m;p—灌溉土壤湿 润比,%,喷灌p=100%;β
max
—按体积比计算的适宜土壤含水率上限,%;β min
—按体积比计算的适宜土壤含水率上限,%;η=灌溉水利用系数,喷灌一般 为η=0.7~0.8。
[0027]
土壤湿度偏差e由田间持水量减去当前采集值构成,e的基本论域取[0,10%], 这个论域基本覆盖作物周围土壤的湿度情况,土壤湿度偏差变化率越大表示土壤 水分蒸发越快过多次测试,一天内土壤湿度偏差的变化率的绝对值都在5%以内, 取ec的基本论域[0,5%]。流量一定的情况下,卷盘式喷灌机最大灌水量取40mm, 满足某作物最大35mm灌水定额,卷盘式喷灌机搭配26m桁架式牵引车,有效 喷辐30m,喷洒长度300m,喷水流量45m3/h,则卷盘式喷灌机牵引车行走速 度设定在20~100m/h,所以取u的基本论域为[20,100]。
[0028]
将e和ec经模糊化后分别得到模糊变量e和ec,其中模糊变量e和ec的 模糊子集均为{vl,lo,md,hi,vh},e和ec的模糊论域为{0,1,2,3,4}, 则量化因子ke=40,k
ec
=80。u模糊子集为{vl,lo,md,hi,vh},模糊论域为{2, 4,6,8,10},则比例因子ku=10。
[0029]
土壤湿度偏差e、土壤湿度偏差变化率ec和牵引车工作行走速度u均为三 角形隶属函数,函数曲线如图3、图4和图5所示。
[0030]
模糊控制器系统采用二个输入参数和一个输出参数的mamdani型控制形式, 其模糊控制规则如下:
[0031][0032]
设定此次采集的土壤湿度偏差为5%,土壤偏差变化率为2%,系统输出牵引 车工作行走速度为60m/h,通过计算可得喷灌强度25mm,和由公式(1)计算出的 喷灌强度一致。
[0033]
信息处理单元计算出卷盘式喷灌牵引车工作行走速度后,由stm32单片机 模块4输出pwm信号到无刷直流电机驱动器11驱动无刷直流电机10,无刷直 流电机10控制卷盘式喷灌牵引车进行田间作业。
[0034]
一种卷盘式喷灌牵引车作业速度智能控制系统作业流程图如图,具体实施步 骤如下:
[0035]
步骤1):当田间土壤湿度低于设定的阈值时,stm32单片机发送信息到手 机app客户端。.
[0036]
步骤2):用户接收到信息后,打开控制系统,系统初始化后进入卷盘式喷 灌机交互界面,通过界面用户可以实时看到各个灌溉单元土壤墒情并选择需要灌 溉的灌溉单元。
[0037]
步骤3):将卷盘式喷灌机牵引车拖到田间另一头后,用户通过lcd交互界 面打开水泵。
[0038]
步骤4):用户通过lcd交互界面确定牵引车作业行走后,系统会自动计算 出行走速度,开始喷灌作业。
[0039]
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式, 在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见 的改进、替换或变型均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1