一种无人直升机控制系统及其算法的制作方法
1.本发明属于无人直升机技术领域,具体涉及一种无人直升机控制系统及其算法。
背景技术:
2.无人直升机,是指由无线电地面遥控飞行或/和自主控制飞行的可垂直起降(vtol)不载人飞行器,在构造形式上属于旋翼飞行器,在功能上属于垂直起降飞行器。近十几年来,随着复合材料、动力系统、传感器、尤其是飞行控制等技术的研究进展,无人直升机得到了迅速的发展,正日益成为人们关注的焦点。
3.目前现有的无人直升机控制系统及其算法还存在一些问题:不方便对发动机转速进行控制,不方便无人机的变速飞行,同时无人直升机的稳定性较差,不方便进行空中悬停,为此我们提出一种无人直升机控制系统及其算法。
技术实现要素:
4.本发明的目的在于提供一种无人直升机控制系统及其算法,以解决上述背景技术中提出的问题。
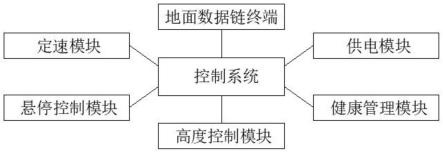
5.为实现上述目的,本发明提供如下技术方案:一种无人直升机控制系统,所述控制系统包括地面数据链终端、定速模块、悬停控制模块、高度控制模块、供电模块和健康管理模块;
6.所述地面数据链终端用于进行与无人直升机之间的信息传输;
7.所述定速模块用于对无人直升机的发动机转速进行定速控制;
8.所述悬停控制模块用于对无人直升机的位置进行保持不变;
9.所述高度控制模块用于控制无人直升机的悬停高度、纵向位置和横向位置;
10.所述供电模块用于对无人直升机的各用电系统或设备提供满足预定设计要求的电能;
11.所述健康管理模块与所述地面数据链终端采取can总线通信方式,用于实时监测转速、发动机温度和油量剩余。
12.优选的,所述地面数据链终端还用于接收无人直升机发送的信息,所述信息包括数据信息和图像信息。
13.优选的,所述定速模块包括检测单元、控制单元、电喷单元和调整单元;所述检测单元用于检测发动机的平均转速和瞬时转速;所述控制单元用于根据所述发动机的平均转速和发动机的目标转速之间的差值及无人直升机当前的飞行状态信息对节气门开度进行调整;所述电喷模块用于根据调整后的节气门开度和发动机的状态信息确定喷油量和喷油时刻;所述调整单元用于根据所述发动机的瞬时转速对所述喷油量和喷油时刻或补气量进行修正,并根据修正后的喷油量和喷油时刻进行喷油控制,以及根据所述补气量进行补气控制。
14.优选的,所述控制系统还包括备用电池模块,所述备用电池模块用于在所述供电
模块断电的情况下,对无人直升机的各用电系统或设备提供满足预定设计要求的电能,所述备用电池模块设置为机载锂电池。
15.本发明还提供了一种无人直升机控制算法,包括以下步骤:
16.s1.通过供电模块对无人直升机的各用电系统或设备提供满足预定设计要求的电能;
17.s2.通过地面数据链终端与无人直升机之间进行信息传输,完成对无人直升机进行控制;
18.s3.通过定速模块对无人直升机的发动机转速进行控制,通过对无人直升机发动机转速进行改变,进行无人直升机的启停;
19.s4.通过定速模块对无人直升机的发动机转速进行定速,并配合悬停控制模块使无人直升机处于悬停状态;
20.s5.通过高度控制模块控制无人直升机的悬停高度、纵向位置和横向位置,使无人直升机进行上升或下落。
21.优选的,所述s3中发动机转速进行控制的方法包括以下步骤:
22.s301.检测发动机的平均转速和瞬时转速,具体包括:
23.获取单位时间内所述发动机的转速信号的脉冲数量,并根据所述转速信号的脉冲数量确定所述发动机的平均转速,具体为:
24.rpm
avarage
=n
sensor
/(n
·
δt)
×
60
25.其中,rpm
avarage
为所述发动机的平均转速,δt为所述单位时间,n
sensor
为在所述单位时间内所述发动机的转速信号的脉冲数量,n为发动机旋转一转中的转速信号的脉冲数量,通过如下公式计算所述发动机的瞬时转速:
26.rpm
instant
=60/t
27.其中,rpm
instant
为所述发动机的瞬时转速,t为一个做功周期对应的发动机曲轴旋转一转的周期;
28.s302.根据所述发动机的平均转速和发动机的目标转速之间的差值及无人直升机当前的飞行状态信息对节气门开度进行调整;
29.s303.根据调整后的节气门开度和发动机的状态信息确定喷油量和喷油时刻;
30.s304.根据所述发动机的瞬时转速对所述喷油量和喷油时刻或补气量进行修正,并根据修正后的喷油量和喷油时刻进行喷油控制,以及根据所述补气量进行补气控制。
31.优选的,所述s4中使无人直升机处于悬停状态包括以下步骤:
32.s401.控制系统从传感器获取无人直升机当前的飞行速度,若无人直升机飞行速度小于等于4m/s,则投入位置保持模态;否则,将无人直升机的飞行速度减小至小于等于4m/s后,再投入位置保持模态;
33.s402.在位置保持模态的每个控制周期t内,控制系统计算出俯仰和横滚通道控制信号,使无人直升机保持悬停状态,t=5~100ms。
34.优选的,所述传感器用于实时采集无人直升机的姿态数据、高度数据和速度数据,所述传感器根据控制律计算出对无人直升机的控制量,所述控制律采用如下公式表示:
35.δδ=k
p
δe+kdδe’36.其中,δδ为无人直升机的控制量,δe为误差数据,δe'为误差数据变化率,k
p
为
误差数据的系数,kd为误差数据变化率的系数。
37.优选的,所述s5中控制无人直升机的悬停高度的控制律如下:
[0038][0039]
式中,u
bhei
为高度控制系统的输出,即为无人直升机的总距输入δc;x
hei
=[δh δw],δh、δw分别为直升机的高度和垂向速度;f
h0
为状态反馈系数;fh为控制系统前馈系数;hc为飞行参考高度;mr为预见步数。
[0040]
优选的,所述s5中控制无人直升机的纵向位置的控制律如下:
[0041][0042]
式中,u
blon
为纵向控制系统的输出,即为直升机的纵向周期变距输入δe;
[0043]
x
lon
=[δx δu δθ δq],δx、δu、δθ、δq分别为直升机的纵向位置、纵向速度、俯仰角和俯仰角速率;f
x0
为纵向状态反馈系数;f
x
为纵向控制系统前馈系数;xc为纵向飞行参考位置,mr为预见步数;
[0044]
所述s5中控制无人直升机的横向位置的控制律如下:
[0045][0046]
式中,u
blat
为横向控制系统的输出,即为直升机的横向周期变距输入δa;
[0047]
x
lat
=[δy δv δφ δp],δy、δv、δφ、δp分别为直升机横向位置、横向速度、滚转角和滚转角速率;f
y0
为横向状态反馈系数;fy为横向控制系统前馈系数;yc为横向飞行参考位置;mr为预见步数。
[0048]
与现有技术相比,本发明的有益效果是:
[0049]
(1)本发明通过设置定速模块能够对无人直升机的发动机转速进行控制,从而方便无人直升机进行变速飞行。
[0050]
(2)本发明通过设置悬停控制模块能够使无人直升机的位置保持不变,从而方便控制无人直升机的空中悬停位置,从而有利于增加无人直升机的稳定性。
[0051]
(3)本发明通过设置高度控制模块能够对无人直升机的高度进行调节,在增加无人直升机的稳定性基础上,增加了无人直升机的抗风性。
[0052]
(4)本发明通过设置健康管理模块能够对无人直升机的健康状态进行管理,方便在无人直升机出现故障前,对存在安全隐患的位置进行处理,增加了安全性。
附图说明
[0053]
图1为本发明的结构框图;
[0054]
图2为本发明定速模块的结构框图;
[0055]
图3为本发明的流程图。
具体实施方式
[0056]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0057]
请参阅图1-图3,本发明提供一种技术方案:一种无人直升机控制系统,所述控制系统包括地面数据链终端、定速模块、悬停控制模块、高度控制模块、供电模块和健康管理模块;
[0058]
所述地面数据链终端用于进行与无人直升机之间的信息传输;
[0059]
所述定速模块用于对无人直升机的发动机转速进行定速控制;
[0060]
所述悬停控制模块用于对无人直升机的位置进行保持不变;
[0061]
所述高度控制模块用于控制无人直升机的悬停高度、纵向位置和横向位置;
[0062]
所述供电模块用于对无人直升机的各用电系统或设备提供满足预定设计要求的电能;
[0063]
所述健康管理模块与所述地面数据链终端采取can总线通信方式,用于实时监测转速、发动机温度和油量剩余。
[0064]
本实施例中,优选的,所述地面数据链终端还用于接收无人直升机发送的信息,所述信息包括数据信息和图像信息。
[0065]
本实施例中,优选的,所述定速模块包括检测单元、控制单元、电喷单元和调整单元;所述检测单元用于检测发动机的平均转速和瞬时转速;所述控制单元用于根据所述发动机的平均转速和发动机的目标转速之间的差值及无人直升机当前的飞行状态信息对节气门开度进行调整;所述电喷模块用于根据调整后的节气门开度和发动机的状态信息确定喷油量和喷油时刻;所述调整单元用于根据所述发动机的瞬时转速对所述喷油量和喷油时刻或补气量进行修正,并根据修正后的喷油量和喷油时刻进行喷油控制,以及根据所述补气量进行补气控制。
[0066]
本实施例中,优选的,所述控制系统还包括备用电池模块,所述备用电池模块用于在所述供电模块断电的情况下,对无人直升机的各用电系统或设备提供满足预定设计要求的电能,所述备用电池模块设置为机载锂电池。
[0067]
本发明还提供了一种无人直升机控制算法,包括以下步骤:
[0068]
s1.通过供电模块对无人直升机的各用电系统或设备提供满足预定设计要求的电能;
[0069]
s2.通过地面数据链终端与无人直升机之间进行信息传输,完成对无人直升机进行控制;
[0070]
s3.通过定速模块对无人直升机的发动机转速进行控制,通过对无人直升机发动机转速进行改变,进行无人直升机的启停;
[0071]
s4.通过定速模块对无人直升机的发动机转速进行定速,并配合悬停控制模块使无人直升机处于悬停状态;
[0072]
s5.通过高度控制模块控制无人直升机的悬停高度、纵向位置和横向位置,使无人直升机进行上升或下落。
[0073]
本实施例中,优选的,所述s3中发动机转速进行控制的方法包括以下步骤:
[0074]
s301.检测发动机的平均转速和瞬时转速,具体包括:
[0075]
获取单位时间内所述发动机的转速信号的脉冲数量,并根据所述转速信号的脉冲
数量确定所述发动机的平均转速,具体为:
[0076]
rpm
avarage
=n
sensor
/(n
·
δt)
×
60
[0077]
其中,rpm
avarage
为所述发动机的平均转速,δt为所述单位时间,n
sensor
为在所述单位时间内所述发动机的转速信号的脉冲数量,n为发动机旋转一转中的转速信号的脉冲数量,通过如下公式计算所述发动机的瞬时转速:
[0078]
rpm
instant
=60/t
[0079]
其中,rpm
instant
为所述发动机的瞬时转速,t为一个做功周期对应的发动机曲轴旋转一转的周期;
[0080]
s302.根据所述发动机的平均转速和发动机的目标转速之间的差值及无人直升机当前的飞行状态信息对节气门开度进行调整;
[0081]
s303.根据调整后的节气门开度和发动机的状态信息确定喷油量和喷油时刻;
[0082]
s304.根据所述发动机的瞬时转速对所述喷油量和喷油时刻或补气量进行修正,并根据修正后的喷油量和喷油时刻进行喷油控制,以及根据所述补气量进行补气控制。
[0083]
本实施例中,优选的,所述s4中使无人直升机处于悬停状态包括以下步骤:
[0084]
s401.控制系统从传感器获取无人直升机当前的飞行速度,若无人直升机飞行速度小于等于4m/s,则投入位置保持模态;否则,将无人直升机的飞行速度减小至小于等于4m/s后,再投入位置保持模态;
[0085]
s402.在位置保持模态的每个控制周期t内,控制系统计算出俯仰和横滚通道控制信号,使无人直升机保持悬停状态,t=5~100ms。
[0086]
本实施例中,优选的,所述传感器用于实时采集无人直升机的姿态数据、高度数据和速度数据,所述传感器根据控制律计算出对无人直升机的控制量,所述控制律采用如下公式表示:
[0087]
δδ=k
p
δe+kdδe’其中,δδ为无人直升机的控制量,δe为误差数据,δe'为误差数据变化率,k
p
为误差数据的系数,kd为误差数据变化率的系数。
[0088]
本实施例中,优选的,所述s5中控制无人直升机的悬停高度的控制律如下:
[0089][0090]
式中,u
bhei
为高度控制系统的输出,即为无人直升机的总距输入δc;x
hei
=[δh δw],δh、δw分别为直升机的高度和垂向速度;f
h0
为状态反馈系数;fh为控制系统前馈系数;hc为飞行参考高度;mr为预见步数。
[0091]
本实施例中,优选的,所述s5中控制无人直升机的纵向位置的控制律如下:
[0092][0093]
式中,u
blon
为纵向控制系统的输出,即为直升机的纵向周期变距输入δe;
[0094]
x
lon
=[δx δu δθ δq],δx、δu、δθ、δq分别为直升机的纵向位置、纵向速度、俯仰角和俯仰角速率;f
x0
为纵向状态反馈系数;f
x
为纵向控制系统前馈系数;xc为纵向飞行参考位置,mr为预见步数;
[0095]
所述s5中控制无人直升机的横向位置的控制律如下:
[0096][0097]
式中,u
blat
为横向控制系统的输出,即为直升机的横向周期变距输入δa;
[0098]
x
lat
=[δy δv δφ δp],δy、δv、δφ、δp分别为直升机横向位置、横向速度、滚转角和滚转角速率;f
y0
为横向状态反馈系数;fy为横向控制系统前馈系数;yc为横向飞行参考位置;mr为预见步数。
[0099]
本发明的原理及优点:
[0100]
本发明通过设置定速模块能够对无人直升机的发动机转速进行控制,从而方便无人直升机进行变速飞行;通过设置悬停控制模块能够使无人直升机的位置保持不变,从而方便控制无人直升机的空中悬停位置,从而有利于增加无人直升机的稳定性;通过设置高度控制模块能够对无人直升机的高度进行调节,在增加无人直升机的稳定性基础上,增加了无人直升机的抗风性;通过设置健康管理模块能够对无人直升机的健康状态进行管理,方便在无人直升机出现故障前,对存在安全隐患的位置进行处理,增加了安全性。
[0101]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1