针对不可测扰动的全格式无模型自适应扰动补偿控制方法
本发明属于自动化控制领域,尤其是涉及一种针对不可测扰动的全格式无模型自适应扰动补偿控制方法。
背景技术:
1、扰动广泛存在于实际控制系统中,如炼油、石化、化工、制药、食品、造纸、水处理、火电、冶金、水泥、橡胶、机械、电气、交通运输、机器人等等行业的大多数被控对象,包括反应器、精馏塔、机器、设备、装置、生产线、车间、工厂、无人车、无人船、无人机、自主移动机器人等。事实上,扰动的存在通常会降低系统的控制性能,严重时可能会造成整个系统的不稳定,进而影响系统安全。
2、现有的全格式无模型自适应控制方法,首先由侯忠生与金尚泰在其合著的《无模型自适应控制—理论与应用》(科学出版社,2013年,第115页)中提出。在此基础上,发明cn108052006a、cn107942674a提出了基于siso的解耦方法,解决了强耦合多输入多输出系统的控制难题;发明cn108170029a、cn108153151a提出了基于神经网络的参数自整定方法,解决了参数选取费时费力的难题;发明cn111522232a提出了一种异因子控制方法,解决了强非线性多输入多输出系统控制通道特性各异的控制问题;发明cn111522233a对发明cn111522232a进行了扩展,提出了带有参数自整定的异因子控制方法,进一步解决了异因子参数需要费时费力进行整定的难题。需要指出的是,上述发明方法都尚未考虑扰动作用下被控对象的控制难题。
3、针对不可测扰动作用下的多输入多输出被控对象,如何高效地利用被控对象实时测量的输入输出数据,不依赖任何数学模型信息进行扰动补偿控制方法的分析和设计,并且所设计的控制方法能够削弱不可测扰动对被控对象系统输出实际值的影响,实现对系统输出期望值的有效跟踪,具有重要的工业应用价值。为实现上述目标,本发明提出了一种针对不可测扰动的全格式无模型自适应扰动补偿控制方法。
技术实现思路
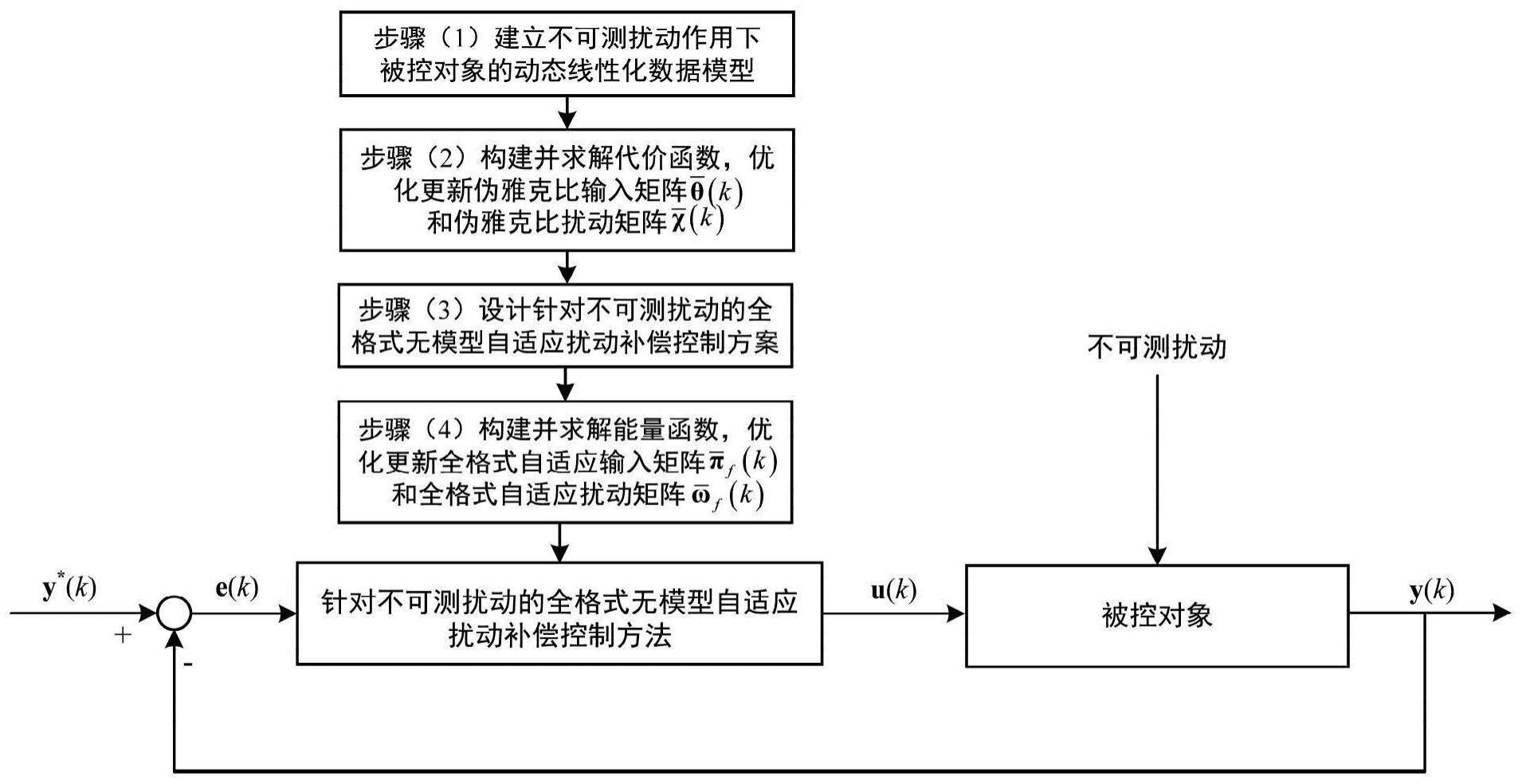
1、为了解决背景技术中存在的问题,本发明的目的在于,提供一种针对不可测扰动的全格式无模型自适应扰动补偿控制方法,所述控制方法运行在硬件平台上对不可测扰动作用下的被控对象进行控制,所述被控对象为包含多个控制输入、多个系统输出的多输入多输出系统,所述控制方法的特征在于,包括以下步骤:
2、步骤(1):在k采样时刻,建立不可测扰动作用下被控对象的动态线性化数据模型,所述被控对象的动态线性化数据模型包含伪雅可比输入矩阵和伪雅可比扰动矩阵
3、步骤(2):构建代价函数并利用函数极值法求解所述代价函数,优化更新步骤(1)中所述伪雅可比输入矩阵和所述伪雅可比扰动矩阵
4、步骤(3):基于步骤(2)优化所述伪雅可比输入矩阵和所述伪雅可比扰动矩阵后的被控对象的动态线性化数据模型,设计针对不可测扰动的全格式无模型自适应扰动补偿控制方案,所述控制方案包含全格式自适应输入矩阵和全格式自适应扰动矩阵
5、步骤(4):构建能量函数并利用动量梯度下降法求解所述能量函数,优化更新步骤(3)中所述全格式自适应输入矩阵和所述全格式自适应扰动矩阵
6、步骤(5):采用步骤(4)优化所述全格式自适应输入矩阵和所述全格式自适应扰动矩阵后的控制方案对不可测扰动作用下被控对象进行控制,削弱不可测扰动对被控对象系统输出实际值的影响,实现对系统输出期望值的有效跟踪。
7、进一步地,步骤(1)中所述的在k采样时刻,建立不可测扰动作用下被控对象的动态线性化数据模型为:
8、
9、其中,k为采样时刻,k为正整数;y(k+1)为k+1采样时刻所述被控对象的系统输出实际值向量,y(k+1)=[y1(k+1),…,yn(k+1)]t,δy(k+1)=y(k+1)-y(k);n为所述被控对象的系统输出总个数,n为大于1的整数;u(k)为k采样时刻所述被控对象的控制输入向量,u(k)=[u1(k),…,um(k)]t,δu(k)=u(k)-u(k-1);m为所述被控对象的控制输入总个数,m为大于1的整数;1q×1=[1;1;…;1]q×1,q为所述被控对象受到的不可测扰动总个数,q为正整数;为k采样时刻伪雅可比输入矩阵,为k采样时刻伪雅可比扰动矩阵。
10、步骤(2)中所述的构建代价函数并利用函数极值法求解所述代价函数,优化更新步骤(1)中所述伪雅可比输入矩阵和所述伪雅可比扰动矩阵主要包括以下步骤:
11、步骤(2.1):为所述伪雅可比输入矩阵构建代价函数
12、
13、其中,μ1为第一个权重因子;
14、步骤(2.2):为所述伪雅可比扰动矩阵构建代价函数
15、
16、其中,μ2为第二个权重因子;
17、步骤(2.3):利用函数极值法求解步骤(2.1)中所述的代价函数,优化更新所述伪雅可比输入矩阵
18、
19、其中,α1为第一个步长因子;
20、步骤(2.4):利用函数极值法求解步骤(2.2)中所述的代价函数,优化更新所述伪雅可比扰动矩阵
21、
22、其中,α2为第二个步长因子。
23、步骤(3)中所述的基于步骤(2)优化所述伪雅可比输入矩阵和所述伪雅可比扰动矩阵后的被控对象的动态线性化数据模型,设计针对不可测扰动的全格式无模型自适应扰动补偿控制方案为:
24、
25、其中,δh(k)=[-e(k)t,δe(k)…,δe(k-l1+2)t,δu(k-1)t,…,δu(k-l2)t]t,e(k)为k采样时刻所述被控对象的系统误差向量,e(k)=y*(k)-y(k),e(k)=[e1(k),…,en(k)]t,δe(k)=e(k)-e(k-1);l1,l2为线性化长度常数;l1,l2为正整数;为k采样时刻全格式自适应输入矩阵,为k采样时刻全格式自适应扰动矩阵。
26、步骤(4)中所述的构建能量函数并利用动量梯度下降法求解所述能量函数,优化更新步骤(3)中所述全格式自适应输入矩阵和所述全格式自适应扰动矩阵主要包括以下步骤:
27、步骤(4.1):构建能量函数
28、
29、其中,y*(k+1)为k+1采样时刻所述被控对象的系统输出期望值向量,λ为惩罚因子;
30、步骤(4.2):利用动量梯度下降法求解步骤(4.1)中所述的能量函数,优化更新所述全格式自适应输入矩阵
31、
32、其中,σ1为第一个学习率,η1为第一个动量因子;为所述能量函数w对的偏导数;
33、步骤(4.3):利用动量梯度下降法求解步骤(4.1)中所述的能量函数,优化更新所述全格式自适应扰动矩阵
34、
35、其中,σ2为第二个学习率,η2为第二个动量因子;为所述能量函数w对的偏导数。
36、步骤(4.2)中所述的所述能量函数w对的偏导数计算公式为:
37、
38、步骤(4.3)中所述的所述能量函数w对的偏导数计算公式为:
39、
40、所述的数学计算公式为:
41、步骤(5)中所述的采用步骤(4)优化所述全格式自适应输入矩阵和所述全格式自适应扰动矩阵后的控制方案对不可测扰动作用下被控对象进行控制,在每一个采样时刻k包括以下步骤:
42、步骤(5.1):获取当前采样时刻的系统输出期望值向量y*(k)、系统输出实际值向量y(k),计算得到当前采样时刻的系统误差向量e(k);
43、步骤(5.2):基于步骤(5.1),采用步骤(4)优化所述全格式自适应输入矩阵和所述全格式自适应扰动矩阵后的控制方案计算得到当前采样时刻的控制输入向量u(k);
44、步骤(5.3):所述控制输入向量作用于被控对象后,得到被控对象在下一采样时刻的系统输出实际值向量。
45、进一步地,本发明采用以下技术方案:
46、一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现上述的针对不可测扰动的全格式无模型自适应扰动补偿控制方法。
47、更进一步地,本发明采用以下技术方案:
48、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现上述的针对不可测扰动的全格式无模型自适应扰动补偿控制方法。
49、基于现有的全格式无模型自适应控制方法理论基础,一些发明方法已经在解决被控对象强耦合、通道特性各异以及参数费时费力整定等问题上取得了进展,但是这些发明方法都尚未考虑扰动作用下被控对象的控制问题,制约了其推广应用。针对不可测扰动作用下的多输入多输出被控对象,本发明能高效地利用被控对象实时测量的输入输出数据,不依赖任何数学模型信息进行扰动补偿控制方法的分析和设计,并且所设计的控制方法能够削弱不可测扰动对被控对象系统输出实际值的影响,实现对系统输出期望值的有效跟踪,具有重要的工业应用价值。
- 还没有人留言评论。精彩留言会获得点赞!