一种可精准定位的无人驾驶施工车辆技术
本发明涉及一种可无人驾驶的施工车辆技术,具体涉及一种可精准定位的无人驾驶施工车辆的技术。
背景技术:
1、目前,随着建筑业规模不断扩大,施工车辆需求越来越大,施工现场也愈加复杂,由此衍生出来的诸多安全问题日渐明显,其中无人施工车辆的定位技术尤显重要。当施工车辆在复杂的场景下工作时,容易引起驾驶人员驾驶劳累,需要时刻注意周围环境,稍不注意容易出现安全问题。因此在解决人员驾驶安全问题,减少劳动力消耗,无人驾驶车辆的研究具有重要意义。
技术实现思路
1、为了解决施工车辆的无人驾驶的定位问题,本发明专利提供了一种基于激光slam的无人施工车辆的定位技术,该技术可以通过构建高精度地图,实现无人驾驶车辆的精准定位,提高无人驾驶车辆运动的轨迹精度和安全性。
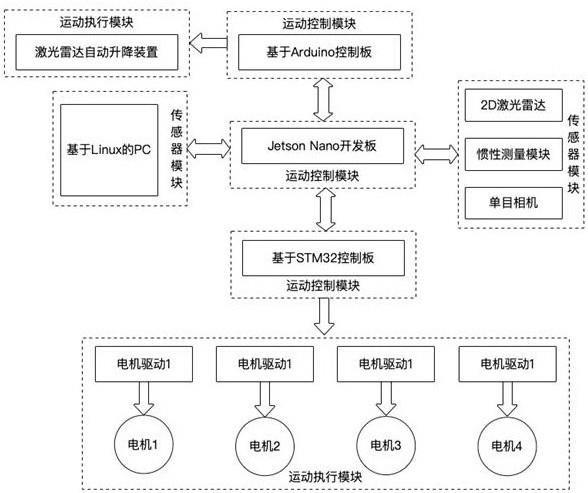
2、本发明专利解决其技术问题所采用的技术方案是:总体架构是由升降装置、2d激光雷达、平衡装置等组成,上位机为: jetson nano开发板;传感器模块为: 2d激光雷达、单目相机、imu(惯性测量单元);搭载了linux系统的个人电脑远程实时监控模块;下位机为:stm32控制模块、arduino 控制模块,其中stm32控制模块控制底盘电机运动,arduino 控制模块控制激光雷达自动升降装置运动。
3、为了实现无人驾驶车辆的定位和避障要求,软件系统建立在ros平台上,而硬件平台则针对无人驾驶车辆平台的定位和避障系统的各个功能模块进行分层设计,分别为:指令层、算法层、控制层、硬件层。
4、指令层指将pc机与jetson nano主机安装ubuntu系统,并且连接5g信号,然后在.bashrc文件中配置相关的ip参数,使pc机与jetsonnano主机在同一个局域网下,然后即可通过ssh网络协议远程控制jetsonnano主机。在ros中可打开rviz可视化工具远程实时监控施工车辆的建图状态与施工环境,实时监测施工车辆在施工环境中的位置。
5、算法层指主要由jetsonnano主机和2d激光雷达组成,主要用来接收激光雷达的数据和接收stm32获取的惯导数据,通过slam与避障算法实现施工车辆平台局部路径规划。施工车辆的slam定位算法使用cartographer算法,采用图优化的方法,根据保存的传感器数据和它们之间的约束关系,然后根据建立的约束关系来对机器人移动的轨迹和地图进行准确估计。
6、控制层指由stm32控制板、arduino控制板、惯导传感器、编码器组成,stm32控制板用于接收惯导传感器数据,arduino控制板用于控制激光雷达自动升降装置,然后将stm32控制板和arduino控制板与上位机jetson nano主机进行串口通信,指令层发送控制指令,控制层实时响应,使施工车辆作出相应变化。
7、硬件层指由割草机器人本体、2d激光雷达、惯导传感器、单目相机等组成。
技术特征:
1.一种可精准定位的无人驾驶施工车辆技术,其特征在于:无人施工车辆整体架构包括上位机:主控系统模块;传感器模块:2d激光雷达、单目相机、惯性测量单元;下位机:运动控制模块;无人施工车辆平台分层设计分为:指令层、算法层、控制层、硬件层;无人施工车辆slam算法:一种增强定位的cartograper算法。
2.根据权利要求1所述的一种可精准定位的无人驾驶施工车辆技术的整体架构,其特征在于:创新性地对施工车辆进行整体设计,从上位机、传感器模块和下位机进行设计;总体架构是由升降装置、2d激光雷达、平衡装置等组成,上位机为: jetson nano开发板;传感器模块为: 2d激光雷达、单目相机、imu(惯性测量单元);搭载了linux系统的个人电脑远程实时监控模块;下位机为:stm32控制模块、arduino 控制模块,其中stm32控制模块控制底盘电机运动,arduino 控制模块控制激光雷达自动升降装置运动。
3.根据权利要求1所述的一种可精准定位的无人驾驶施工车辆技术的平台分层设计,其特征在于:硬件平台则针对无人驾驶车辆平台的定位和避障系统的各个功能模块进行分层设计,分别为:指令层、算法层、控制层、硬件层;指令层指将pc机与jetson nano主机安装ubuntu系统,使pc机与jetsonnano主机在同一个局域网下;在ros中可打开rviz可视化工具远程实时监控施工车辆的建图状态与施工环境,实时监测施工车辆在施工环境中的位置;算法层指主要由jetsonnano主机和2d激光雷达组成,主要用来接收激光雷达的数据和接收stm32获取的惯导数据,通过slam与避障算法实现施工车辆平台局部路径规划;控制层指由stm32控制板、arduino控制板、惯导传感器、编码器组成,stm32控制板用于接收惯导传感器数据,arduino控制板用于控制激光雷达自动升降装置,然后将stm32控制板和arduino控制板与上位机jetson nano主机进行串口通信,指令层发送控制指令,控制层实时响应,使施工车辆作出相应变化;硬件层指由割草机器人本体、2d激光雷达、惯导传感器、单目相机等组成。
4.根据权利要求1所述的一种可精准定位的无人驾驶施工车辆技术的定位技术,其特征在于:经过改进后的cartographer算法框架,为了解决重定位正确率较低、回环检测耗时较长的问题,对传统的cartographer算法进行增强改进;在原有的cartographer算法框架上改进:首先加载字典,提取特征:接收单目相机传来的图像信息,然后提取图像中的特征点,提取特征点方法为:首先分块提取图像中特征点,其次使用四叉树分配特征点,最后提取每块中相应最大的特征点,从而获得分布均匀的特征点;然后对特征点进行描述即计算描述子,查询字典计算该帧的bow向量,将bow向量和图像index 传送到后端;数据库更新:在后端中,图像index与当前时刻的nodeid捆绑在一起记为node__to_image,同时更新到“单词-图像index"数据库中,并记为keyframedatabase,此时数据库中保存了每个单词所在的图像的index;查询闭环:根据当前时刻获得的图像的单词,去数据库中查找相同的单词的历史图像;找到该图像后,将该图像的index与node index 对应,最后在node的位姿处运用当前激光数据和该处的地图匹配;保存数据库:建图结束保存地图,将数据库保存到硬盘中。
技术总结
本发明公布了一种无人驾驶的施工车辆技术,具体研究了一种可精准定位的无人驾驶的施工车辆技术。对现有无人施工车辆以及相关定位技术进行充分调研后,设计了可精准定位的无人施工车辆平台,搭载了激光雷达自动升降装置、激光雷达平衡装置,并在硬件平台上对主控器、IMU、激光雷达和单目相机进行了选型。设计了基于激光雷达自动升降装置、激光雷达平衡装置和增强重定位的Cartograper算法,并对其进行了验证:相对误差率降低了1.04%,漏检率降低为0%,避障率提高了93.33%。
技术研发人员:田野,刘培培,胡超玄
受保护的技术使用者:成都理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!