一种脉冲控制器的制作方法
1.本实用新型属于布袋除尘技术领域,特别是涉及一种脉冲控制器。
背景技术:
2.脉冲控制器是一种布袋除尘设备上的核心控制单元,它是通过电磁阀将一个特制的高压气罐中的压缩气体瞬间释放到管道中,将管道中的灰尘随着高压高速气流吹出管道,管道外套一个很大的布袋,用这个布袋收集在管道中吹出来的灰尘,广泛运用于粮食加工,水泥等工业粉尘比较大的场合,从而促进环保事业的健康发展。
3.现有的脉冲控制器之间的原理差不多,所不同的对参数输入、显示屏和端口输出部分有所不同;目前市场上流行的产品,主控一般用美国microchip公司的pic系列单片机,鉴于实际大环境及供应链安全的考虑,本技术方案采用性能更可靠的国产stc的单片机stc15f204ea;目前市场上输出端口的驱动采用的是可控硅驱动,而本技术方案采用的是继电器驱动,可控硅在对抗冲击等稳定性方面不如继电器驱动,且控制信号是没有隔离的,驱动力也不大,继电器驱动是采用隔离结构,也就是控制和输出两者是分开的,寿命更长且更安全。
技术实现要素:
4.本实用新型提供了一种脉冲控制器,解决了以上问题。
5.为解决上述技术问题,本实用新型是通过以下技术方案实现的:
6.本实用新型的一种脉冲控制器,包括主控模块、显示模块以及驱动模块;
7.所述主控模块包括主控芯片以及按键组;
8.所述主控芯片上的1脚、28脚、27脚分别连接第一电阻、第二电阻、第三电阻,所述第一电阻、第二电阻、第三电阻的另一端分别连接第一pnp三极管、第二pnp三极管、第三pnp三极管的基极;所述第一pnp三极管、第二pnp三极管、第三pnp三极管上的发射极分别连接5v电源;
9.所述第一pnp三极管上的第一集电极连接七个继电器的前级电源口;所述第二pnp三极管上的第二集电极连接七个继电器的前级电源口;第三pnp三极管上的第三集电极连接六个继电器的前级电源口;
10.所述主控芯片上的24脚、23脚、26脚、25脚、22脚、21脚、20脚分别连接三个驱动模块上的1脚、2脚、3脚、4脚、5脚、6脚、7脚,作为输入;其中两个驱动模块上的10脚、11脚、12脚、13脚、14脚、15脚、16脚分别接到与第一集电极、第二集电极相连的七个继电器的的前级控制脚;另一驱动模块上的11脚、12脚、13脚、14脚、15脚、16脚分别接到第三集电极相连的六个继电器的前级控制脚;
11.各继电器的后级控制输出信号地脚全部接到电磁阀电路的电源地线,另一端接电磁阀,电磁阀的另一端接公共线;
12.所述显示模块包括显示驱动芯片以及数码管;
13.所述主控芯片的13脚、19脚分别连接显示驱动芯片上的1脚和2脚、8脚;所述驱动芯片上的3脚、4脚、5脚、6脚、10脚、11脚、12脚、13脚分别接第四电阻、第五电阻、第六电阻、第七电阻、第八电阻、第九电阻、第十电阻、第十一电阻,所述第四电阻、第五电阻、第六电阻、第七电阻、第八电阻、第九电阻、第十电阻、第十一电阻的另一端分别连接数码管上的10脚、9脚、1脚、3脚、2脚、6脚、4脚、5脚;
14.所述主控芯片上的7脚、8脚、9脚分别连接第十二电阻、第十三电阻、第十四电阻,所述第十二电阻、第十三电阻、第十四电阻的另一端分别连接第四pnp三极管、第五pnp三极管、第六pnp三极管的基极;所述第四pnp三极管、第五pnp三极管、第六pnp三极管的发射极均连接5v电源,位于第四pnp三极管、第五pnp三极管上的第四集电极、第五集电极分别连接数码管上的电源脚8脚和7脚,第六pnp三极管上的第六集电极连接六个发光二极管的正极,各发光二极管的负极分别接到显示驱动芯片上的12脚、11脚、10脚、6脚、5脚、4脚。
15.进一步地,所述主控芯片具体采用stc15f204ea型单片机。
16.进一步地,所述驱动模块具体采用uln2003a驱动模块。
17.进一步地,所述显示驱动芯片具体采用74hc164型驱动芯片。
18.进一步地,所述第一pnp三极管、第二pnp三极管、第三pnp三极管、第四pnp三极管、第五pnp三极管、第六pnp三极管均采用ss8550型三极管。
19.进一步地,所述主控芯片上的4脚、5脚、17脚、18脚分别连接按键组中的+按键、设置按键、复吹按键、-按键,各按键的另一端接地。
20.进一步地,所述显示驱动芯片的7脚为电源的负极,接到地;显示驱动芯片的9脚和14脚为电源的正极,接到5v电源,所述5v电源再接有一个第一电容,所述第一电容另一端接地。
21.进一步地,所述主控芯片的12脚为电源的正极,接5v电源,主控芯片的14脚为电源负极接地,且12脚与14脚之间连接有第二电容。
22.本实用新型相对于现有技术包括有以下有益效果:
23.本技术方案的脉冲控制器采用继电器驱动,对抗冲击的稳定性相对于现有的可控硅驱动更优,继电器采用隔离结构,控制和输出两者分开,使用更安全,寿命更长久;时间参数采用2位数码管显示,清晰明了;采用uln2003a型驱动模块,使电路更加简洁;电路结构中,主控、电源和输出信号部分采用的是分开布局,便于维护;采用按键的方式作为输入参数端口,操作便捷,使用方便。
24.当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
25.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
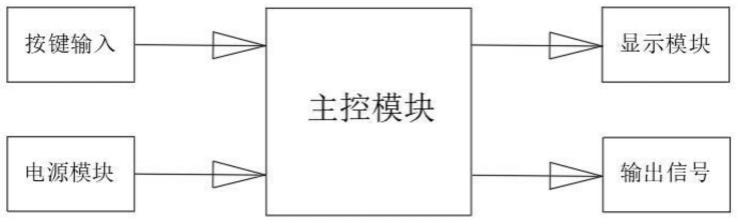
26.图1为本实用新型的一种脉冲控制器的内部模块框图;
27.图2为本实用新型的一种脉冲控制器用控制面板的正面面板样图;
28.图3为本实用新型的一种脉冲控制器用控制面板的背面接线端口图样;
29.图4为本实用新型具体实施例中主控芯片电路脚位图;
30.图5为本实用新型具体实施例中显示模块的电路原理图;
31.图6为本实用新型具体实施例驱动线路中继电器的电路原理图;
32.图7为本实用新型具体实施例驱动线路中驱动模块的电路原理图;
33.图8为本实用新型具体实施例驱动线路中三个pnp三极管的电路原理图;
34.附图中,各标号所代表的部件列表如下:
35.k14/k18/k1/k12/k13/k19/k20/k5/k4/k16/k15/k17/k3/k2/k8/k9/k6/k7/k11/k10-继电器,u1-显示驱动芯片,u2-主控芯片,u3/u4/u5-驱动模块,c4-第一电容,c1-第二电容,r39-第一电阻,r42-第二电阻,r43-第三电阻,r10-第四电阻,r9-第五电阻,r8-第六电阻,r7-第七电阻,r3-第八电阻,r4第九电阻,r5-第十电阻,r6-第十一电阻,r11-第十二电阻,12-第十三电阻,r13-第十四电阻,q5-第一pnp三极管,q6-第二pnp三极管,q7-第三pnp三极管,q1-第四pnp三极管,q2-第五pnp三极管,q3-第六pnp三极管,vcom1-第一集电极,vcom2-第二集电极,vcom3-第三集电极,com4-第四集电极,com5-第五集电极,com6-第六集电极,led2/led3/led4/led5/led6/led7-发光二极管,ds-数码管。
具体实施方式
36.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
37.脉冲控制器是连续提供脉冲波形的机器,这个脉冲波形通过接上各种开关元器件就能实现自动控制某些开关功能。本例主要是针对用于除尘设备的自动控制,在有些粉尘的场合中,需要抽气将粉尘收集起来,但在过程中经常沉淀在大型抽风管道中,所以要用高压气体把管道中的沉淀物吹走。以前定期用人工吹气,现在用脉冲控制器可以连续自动吹气,只要设定好周期参数,设定好后可以掉电保存参数。
38.由于长期不断地连续使用,所以对脉冲控制器的寿命质量要求很高。另外,由于在大型工厂中,本身电网的电压也是经常起伏,不是很稳定,对产品的稳定性也有更高的要求。经过长期的测试,我们发现用继电器比可控硅更可靠更安全,因为它可以将开关信号和后级的控制之间的电源隔离开来。另外,我们采用uln2003a做继电器驱动信号,这样电路很简洁,一个uln2003a(sop16封装)驱动相当于7个三极管,7个电阻,7个反向二极管,即一个uln2003a芯片可以输出7路驱动信号。
39.请参阅图1-8所示,本实用新型的一种脉冲控制器,包括主控模块、显示模块以及驱动模块;驱动模块具体采用uln2003a驱动模块;
40.主控模块包括主控芯片u2以及按键组;主控芯片u2具体采用stc15f204ea型单片机;主控芯片u2上的4脚(p11)、5脚(p12)、17脚(p32)、18脚(p33)分别连接按键组中的+按键、设置按键、复吹按键、-按键,各按键的另一端接地;如图2所示,对应正面的四个按键。
41.主控芯片u2上的1脚(com1)、28脚(com2)、27脚(com3)分别连接第一电阻r39、第二电阻r42、第三电阻r43,第一电阻r39、第二电阻r42、第三电阻r43的另一端分别连接第一pnp三极管q5、第二pnp三极管q6、第三pnp三极管q7的基极,去控制三极管的开合,这三个三
极管作为提供继电器的前级开关电源;第一pnp三极管q5、第二pnp三极管q6、第三pnp三极管q7上的发射极分别连接5v电源;
42.第一pnp三极管q5上的第一集电极vcom1连接七个继电器的前级电源口,具体对应图5中的七个继电器(k1/k12/k13/k14/k18/k19/k20);第二pnp三极管q6上的第二集电极vcom2连接七个继电器的前级电源口,具体对应图5中的七个继电器(k2/k3/k4/k5/k15/k16/k17);第三pnp三极管q7上的第三集电极vcom3连接六个继电器的前级电源口,具体对应图5中的六个继电器(k6/k7/k8/k9/k10/k11);
43.主控芯片u2上的24脚(in1)、23脚(in2)、26脚(in3)、25脚(in4)、22脚(in5)、21脚(in6)、20脚(in7)分别连接三个驱动模块(u3/u4/u5)上的1脚、2脚、3脚、4脚、5脚、6脚、7脚,作为输入;
44.其中,驱动模块(u3)的10脚/11脚12脚/13脚/14脚15脚/16脚分别接到继电器(k14/k18/k1/k12/k13/k19/k20)的前级控制脚;
45.其中,驱动模块(u4)的10脚/11脚12脚/13脚/14脚15脚/16脚分别接到继电器(k5/k4/k16/k15/k17/k3/k2)的前级控制脚;
46.其中,驱动模块(u5)的11脚12脚/13脚/14脚15脚/16脚分别接到继电器(k8/k9/k6/k7/k11/k10)的前级控制脚;
47.各继电器的后级控制输出信号地脚全部接到电磁阀电路的电源地线,另一端接电磁阀,电磁阀的另一端接公共线,如图3所示,为背面接线端口样图;
48.显示模块包括显示驱动芯片u1以及数码管ds;显示驱动芯片具体采用74hc164型驱动芯片;
49.主控芯片u2的13脚(p55)、19脚(p34)分别作为显示驱动芯片u1的clk和data,主控芯片u2的13脚(p55)、19脚(p34)分别连接显示驱动芯片u1上的1脚、2脚,该1脚和2脚连接在一起;驱动芯片u1上的3脚、4脚、5脚、6脚、10脚、11脚、12脚、13脚分别接第四电阻r10、第五电阻r9、第六电阻r8、第七电阻r7、第八电阻r3、第九电阻r4、第十电阻r5、第十一电阻r6,第四电阻r10、第五电阻r9、第六电阻r8、第七电阻r7、第八电阻r3、第九电阻r4、第十电阻r5、第十一电阻r6的另一端分别连接数码管ds上的10脚、9脚、1脚、3脚、2脚、6脚、4脚、5脚;
50.主控芯片u2上的7脚(p14)、8脚(p15)、9脚(p16)分别连接第十二电阻r11、第十三电阻r12、第十四电阻r13,第十二电阻r11、第十三电阻r12、第十四电阻r13的另一端分别连接第四pnp三极管q1、第五pnp三极管q2、第六pnp三极管q3的基极;第四pnp三极管q1、第五pnp三极管q2、第六pnp三极管q3的发射极均连接5v电源,位于第四pnp三极管q1、第五pnp三极管q2上的第四集电极com4、第五集电极com5分别连接数码管ds上的电源脚8脚和7脚,第六pnp三极管q3上的第六集电极com6连接六个发光二极管的正极,对应如图4中所示的发光二极管led2/led3/led4/led5/led6/led7,各发光二极管的负极分别接到显示驱动芯片u1上的12脚、11脚、10脚、6脚、5脚、4脚,这6个灯作为显示工作状态指示。
51.其中,第一pnp三极管q5、第二pnp三极管q6、第三pnp三极管q7、第四pnp三极管q1、第五pnp三极管q2、第六pnp三极管q3均采用ss8550型三极管。
52.其中,显示驱动芯片u1的7脚为电源的负极,接到地;显示驱动芯片u1的9脚和14脚为电源的正极,接到5v电源,5v电源再接有一个第一电容c4,第一电容c4另一端接地,用于局部电源滤波。
53.其中,主控芯片u2的12脚为电源的正极,接5v电源,主控芯片u2的14脚为电源负极接地,且12脚与14脚之间连接有第二电容c1,用于主控电源滤波处理。
54.如图1所示,为脉冲控制器内部模块框图,按键组和电源连接到主控模块以后,根据按键输入的设定参数,主控模块做出相应的流程判断和处理,同时在按键输入参数的同时,显示相关的参数和状态在显示屏上,具体如图2所示;自动运行后,将控制参数和状态输出至背面的输出接口,具体如图3所示;
55.本技术方案的脉冲控制器的工作原理分为几个模块,如图1所示,为脉冲控制器内部模块框图。开关部分提供5v和24v直流电源,其中5v供芯片等控制电路使用,24v是作为电磁阀的工作电压,作为公共线输出至仪器背面端口。按键作为输入参数端口,一共4个,分别是设置/+/-/复吹。前三个是设置参数使用的,复吹是在工作工程中,如果某一路要加强需要多次重复吹气,就按一下这个按钮,再按一次就退出。显示模块是一个2位数字的数码管,在设置状态的时候显示设定的时间,在运行过程中显示的是工作路数的序号。输出信号模块是输出控制信号,这个信号是接到电磁阀,电磁阀的另一端接到公共线上(24v),这样形成一个回路,电磁阀才能正常工作。
56.本技术方案的脉冲控制器接在除尘设备以后,可以将除尘改进成一种自动化操作工具,可以根据实际情况(如某一路灰尘比较多,某些灰尘比较少),对不同的管道采取不同的清理方式,很灵活实用。本案的输出部分采用继电器输出方式,实际实用寿命50万次以上,可靠安全。另外,在电路结构中,主控、电源和输出信号部分,两者是分开布局的,这样使得维护简单,一旦有或许维保只要换相应的模块就可以实现。
57.本技术方案的脉冲控制器的参数输入采用按键选择菜单方式,主要选择时间参数脉冲间隔、脉冲宽度、脉冲停顿三个参数。脉冲间隔是打开一个脉冲阀门和打开下一个阀门的间隔时间,脉冲宽度是打开阀门的时间,脉冲停顿是整个周期(如第12路阀门)结束以后和下个周期之间的时间。时间参数采用2位数码管显示,清晰明了。还有一个最大的不同是输出端口部分。目前市场上输出端口的驱动采用的是可控硅驱动,而我们采用的是继电器驱动。可控硅对抗冲击等稳定性方面不如继电器,而且控制信号是没有隔离的,驱动力也不大。继电器是采用隔离结构,也就是控制和输出两者是分开的,寿命更长更安全。
58.本技术方案的脉冲控制器采用继电器驱动,对抗冲击的稳定性相对于现有的可控硅驱动更优,继电器采用隔离结构,控制和输出两者分开,使用更安全,寿命更长久;时间参数采用2位数码管显示,清晰明了;采用uln2003a型驱动模块,使电路更加简洁;电路结构中,主控、电源和输出信号部分采用的是分开布局,便于维护;采用按键的方式作为输入参数端口,操作便捷,使用方便。
59.以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1