车用电磁阀兼容控制系统及可读存储介质的制作方法
本发明涉及车辆,特别涉及一种车用电磁阀兼容控制系统。
背景技术:
1、车辆中有很多装置需要使用电磁阀进行控制,这些电磁阀包括可变阻尼减震器电磁阀、空气悬架气路分配阀、四驱断开装置电磁阀、主动稳定杆模式电磁阀、热管理sov阀等。
2、这些电磁阀从控制方式上可以分为三类,第一类是on/off控制类型的,例如空气悬架气路分配阀和热管理sov阀等。这类电磁阀控制方式较为简单,通过控制电磁阀的两端电压在0v和12v之间切换即可完成阀的开闭控制。这类电磁阀的控制原理以及控制方法分别如图1及图2所示。
3、第二类是比例电磁阀,例如可变阻力减震器电磁阀。这类电磁阀需要通过脉宽调制(pwm,pulse width modulation)控制的方式稳定流过电磁阀(valve)的电流,从而控制阀的开度。这就要求控制端需要具备电流闭环控制,根据目标电流(target current)和反馈电流(feedback current)对比,输出不同占空比的pwm信号,将电磁阀的电流稳定在目标电流附近。这类电磁阀的控制原理以及控制方式分别如图3、4所示。
4、对于可变阻力减震器电磁阀这类比例电磁阀,一般电磁阀的最大驱动电流不会超过2a,硬件设计上一般会选用集成芯片进行驱动,这类驱动芯片有英飞凌公司的tle8242和意法半导体的l9305。
5、第三类是峰值-保持控制类型的电磁阀,亦即,peak-hold电磁阀,这类电磁阀的控制电路和比例电磁阀一致,都是图3的这种控制电路,但是控制方式如下图5所示。控制原理和比例电磁阀的控制原理是一致的,都是通过采集电磁阀的电流实现电流闭环控制。
6、对于这三种不同控制要求的电磁阀,在控制器的驱动上希望做到兼容设计以达到平台化的目的,这样可以最大限度在满足客户需求前提下做到降低控制器开发成本和物料成本的目的。对于第一类电磁阀,可以和普通的负载控制相兼容,例如可以选择大灯控制的输出来兼容,因为他们都是使用高边开关进行on/off控制,只要负载电流接近就可以兼容。对于第二类和第三类电磁阀,希望他们也能够兼容,给比例电磁阀设计的驱动电路也可以用作peak-hold电磁阀的驱动,反之亦然。
7、但目前的设计方案不能满足第二类电磁阀和第三类电磁阀驱动兼容的要求。例如对于比例电磁阀而言,如图4所展示的控制方式,最大电流是2a,这样我们在选择驱动芯片的时候通常会选择意法半导体的l9305。通过查询芯片使用信息可以知道l9305能支持的电流控制闭环控制是2a,这样就无法满足图5中peak-hold电磁阀的最大电流为2.5a的要求,无法做到兼容。若要做到兼容需要选择l9352,l9352能支持的电流闭环控制是5a,但是若使用l9352来实现兼容,会有两个问题:
8、(1)成本大幅增长,驱动能力强的l9352成本要比l9305高是显而易见的
9、(2)驱动能力增加导致在低电流控制时误差增大,l9305在0a~0.5a范围的控制误差仅有5ma,而l9352在0a~0.5a范围的控制误差为25ma。
技术实现思路
1、本发明旨在提供一种车用电磁阀兼容控制系统,以解决现有技术中不能对不同类型的电磁阀驱动兼容的问题。
2、为了解决上述问题,本发明提供一种车用电磁阀兼容控制系统,包括:微控制单元和驱动芯片;
3、所述驱动芯片具有用以控制电磁阀电流的电流硬控模式和电流软控模式;
4、所述微控制单元被配置为,判断电磁阀的目标电流是否超过所述驱动芯片能够支持的最大闭环控制电流,若是,则将所述驱动芯片的模式切换为电流软控模式,若否,则将所述驱动芯片的模式切换为电流硬控模式;
5、其中,所述电流硬控模式包括:所述驱动芯片闭环控制所述电磁阀的电流;所述电流软控模式包括:所述驱动芯片将所述电磁阀的电流信息反馈给所述微控制单元,使得所述微控制单元闭环控制所述电磁阀的电流。
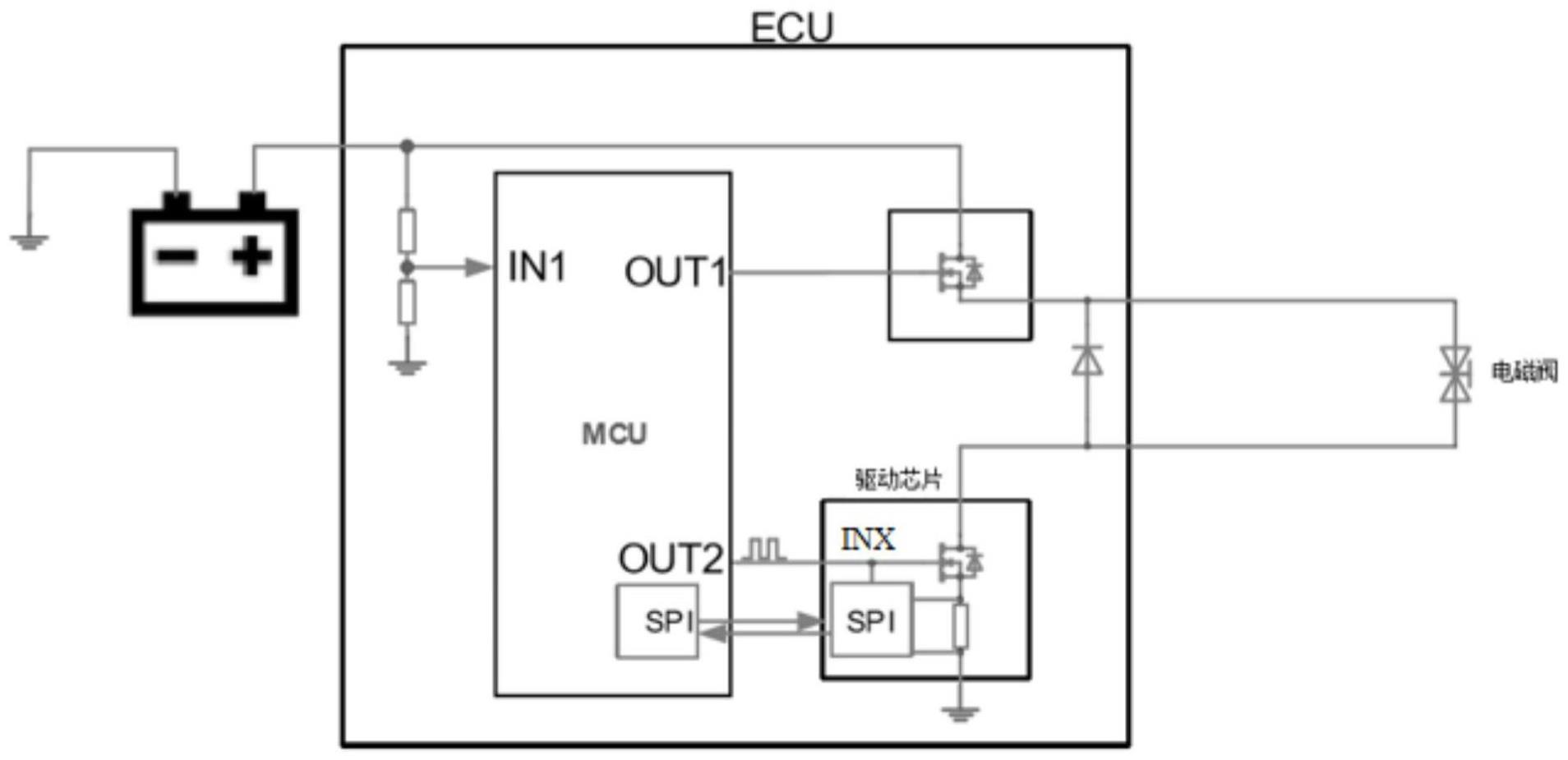
6、可选的,在所述的车用电磁阀兼容控制系统中,所述微控制单元还被配置为,对供电电源的电压进行采样,若所述供电电源的电压超过设定电压,则控制用于连接供电电源与所述电磁阀的高边开关断开,并记录电源欠压故障。
7、可选的,在所述的车用电磁阀兼容控制系统中,所述微控制单元具有in1脚和out1脚,所述微控制单元通过所述in1脚对供电电源的电压进行采样,以及通过所述out1脚控制连接所述供电电源和所述电磁阀的高边开关的通断。
8、可选的,在所述的车用电磁阀兼容控制系统中,所述微控制单元还被配置为,以超过所述驱动芯片能够支持的最大闭环控制电流的目标电流对所述电磁阀进行闭环控制的持续时间不超过设定时间。
9、可选的,在所述的车用电磁阀兼容控制系统中,所述微控制单元判断是否超过所述设定时间的方法包括:
10、在开始以超过所述驱动芯片能够支持的最大闭环控制电流的目标电流对所述电磁阀进行闭环控制时开始计时,若计时时间超过所述设定时间,则停止以超过所述驱动芯片能够支持的最大闭环控制电流的目标电流对所述电磁阀进行闭环控制。
11、可选的,在所述的车用电磁阀兼容控制系统中,所述驱动芯片通过低边开关与所述电磁阀电性连接,所述驱动芯片和所述微控制单元均通过控制所述低边开关的通断以控制所述电磁阀的电流。
12、可选的,在所述的车用电磁阀兼容控制系统中,所述驱动芯片具有第一spi接口和所述低边开关,所述微控制单元具有第二spi接口、inx脚和out2脚,所述微控制单元通过第二spi接口与所述驱动芯片的所述第一spi接口电性连接,以向所述驱动芯片发送spi指令及接收所述驱动芯片反馈的所述电流信息,以及通过所述out2脚与所述inx脚电性连接,以控制所述低边开关的通断。
13、可选的,在所述的车用电磁阀兼容控制系统中,所述驱动芯片和所述微控制单元均通过输出不同的脉冲宽度调制信号以控制所述低边开关的通断。
14、可选的,在所述的车用电磁阀兼容控制系统中,所述驱动芯片为控制比例电磁阀电流的驱动芯片,若所述驱动芯片能够支持的最大闭环控制电流大于峰值-保持控制类型的电磁阀电流峰值阶段的目标电流值,以及小于所述峰值-保持控制类型的电磁阀电流保持阶段的目标电流值,则:
15、在其电流峰值阶段,采用所述电流软控模式进行控制;
16、在其电流保持阶段,采用所述电流硬控模式进行控制。
17、本发明还提供一种可读存储介质,所述可读存储介质存储有计算机程序,所述计算机程序被执行时,实现如下步骤:
18、判断电磁阀的目标电流是否超过驱动芯片能够支持的最大闭环控制电流,若是,则将所述驱动芯片的模式切换为电流软控模式,若否,则将所述驱动芯片的模式切换为电流硬控模式;
19、其中,所述电流硬控模式包括:所述驱动芯片闭环控制所述电磁阀的电流;所述电流软控模式包括:所述驱动芯片将所述电磁阀的电流信息反馈给微控制单元,使得所述微控制单元闭环控制所述电磁阀的电流。
20、综上所述,本发明提供的车用电磁阀兼容控制系统及可读存储介质,包括:判断电磁阀的目标电流是否超过驱动芯片能够支持的最大闭环控制电流,若是,则将所述驱动芯片的模式切换为电流软控模式,若否,则将所述驱动芯片的模式切换为电流硬控模式;其中,所述电流硬控模式包括:所述驱动芯片闭环控制所述电磁阀的电流;所述电流软控模式包括:所述驱动芯片将所述电磁阀的电流信息反馈给微控制单元,使得所述微控制单元闭环控制所述电磁阀的电流。通过本发明提供的车用电磁阀兼容控制系统及可读存储介质,不同电流控制模式的切换,解决了现有技术中不能对不同类型的电磁阀驱动兼容的问题。
- 还没有人留言评论。精彩留言会获得点赞!