面向野外恶劣环境下的机器人自主可通过方法及机器人
本发明涉及机器人自主运动领域,特别是涉及一种面向野外恶劣环境下的机器人自主可通过方法及机器人。
背景技术:
1、随着社会经济水平的发展和对智慧城市的向往,国家加大了对无人系统、智能体的投入,机器人等典型智能体在生活中被广泛的使用。传统机器人的应用目的是为了减少人们的一些繁琐的任务,例如在工厂中的工业机器人和餐厅中的送餐机器人等。机器人的自主运动环节主要由三部分组成,分别是环境感知、自主规划和行为控制。环境感知部分是利用机器人本体所携带的传感器对周围环境中的物体信息进行采集然后分析自身的位姿;自主规划是根据任务需求的目的地设计感知到的环境中到达的路线;行为控制则是对机器人本体如何到达目的地的一种设计。在野外的环境中,未知的环境使得一些现有的地图或者gps定位不准确,这就导致了在一些具体任务的实施中难以满足要求。
2、现有机器人的自主运动方案一般是采用激光雷达或者相机作为数据采集装置,在机器人的前端或者是上部固定传感器,针对采集到的数据这一对象,一般采用实时处理的方式将数据进行整合构建出机器人实时感知到的地图进而判断机器人周边的区域是否存在一些明显的障碍物,对障碍物的半径设置为实际半径的1.2倍以上,保证机器人在自主运动时对障碍物的躲避并通过。
3、方案1:利用机器人本体上的双目相机采集环境中的数据,通过计算机实时处理构建出环境地图并通过特征点匹配的方法实现机器人的实时定位。将双目相机中的图像数据(左、右目图像数据或者是深度数据)转化为三维点云数据,利用该点云数据对障碍物进行代价范围的选取,然后再选取机器人的可通过区域。
4、方案2:利用机器人本体上的激光雷达采集环境中的数据,通过计算机实时处理将数据中的一些错误的点去除,然后再构建地图,利用实际的点云数据采用icp算法进行当前位姿的计算得到机器人的实时位置。利用所构建的3d点云地图选择机器人的实际可通过性区域。
5、现有方法存在的主要缺点有两个:1)环境感知地图构建和定位精度差。传统的机器人对环境的感知一般采用传感器采集到的所有数据进行地图构建和实时定位。但在野外恶劣环境下相机采集到的数据较为嘈杂,导致了对图像特征提取的效果不好,进一步导致了后续的建图和定位效果较差;而激光雷达采集到的数据噪点较多,对实际的建图与定位贡献较小。综上,较差的环境感知和定位在对障碍物的识别方面也将变得艰难且不稳定。2)在野外恶劣场景中,无规则的环境和快速的机器人位姿的变换导致了传感器采集到的数据量十分庞大,其中包含了大量的边角点和杂乱的无效图像特征,机器人在实时处理时会加大整个计算资源的消耗,导致后续的计算能力下降,导致了整体的实时性变差,无法准确的规划机器人的实时可通过性。
6、为避免上述环境中地图构建定位精度和计算量大的问题,对机器人搭载的传感器采集回来的数据进行边角点、深度信息错误点以及无意义点(例如动态物体产生的点)利用欧式聚类的方式进行剔除,在数据剔除的基础上再进行环境感知是一种新的方法。该方法利用减少动态点等后的点云数据为动态输入,但是在重复经过相同位置的时候会造成数据的堆积冗余,导致环境感知的精度较低,导致对地图的构建时会出现较大的漂移进而导致可通过性变差。
7、以上方法的主要缺点是机器人感知环境时的建图和定位精度以及可通过性的分析仍受限于传感器采集的数据量的大小,且其剔除数据的精度较低,剔除质量不高导致了一些环境中的静态特征也被删除,对定位的精度就会下降进而导致可通过性更差。同时对于车体本身的信息没有考虑在算法的可通过性中,导致了在实际的自主运动中会造成侧翻等意外情况出现。
技术实现思路
1、本发明的目的是提供一种面向野外恶劣环境下的机器人自主可通过方法及机器人,以解决机器人野外环境下点云数据量大、定位实时性和可通过性分析精度差的无法自适应学习的问题。
2、为实现上述目的,本发明提供了如下方案:
3、一种面向野外恶劣环境下的机器人自主可通过方法,包括:
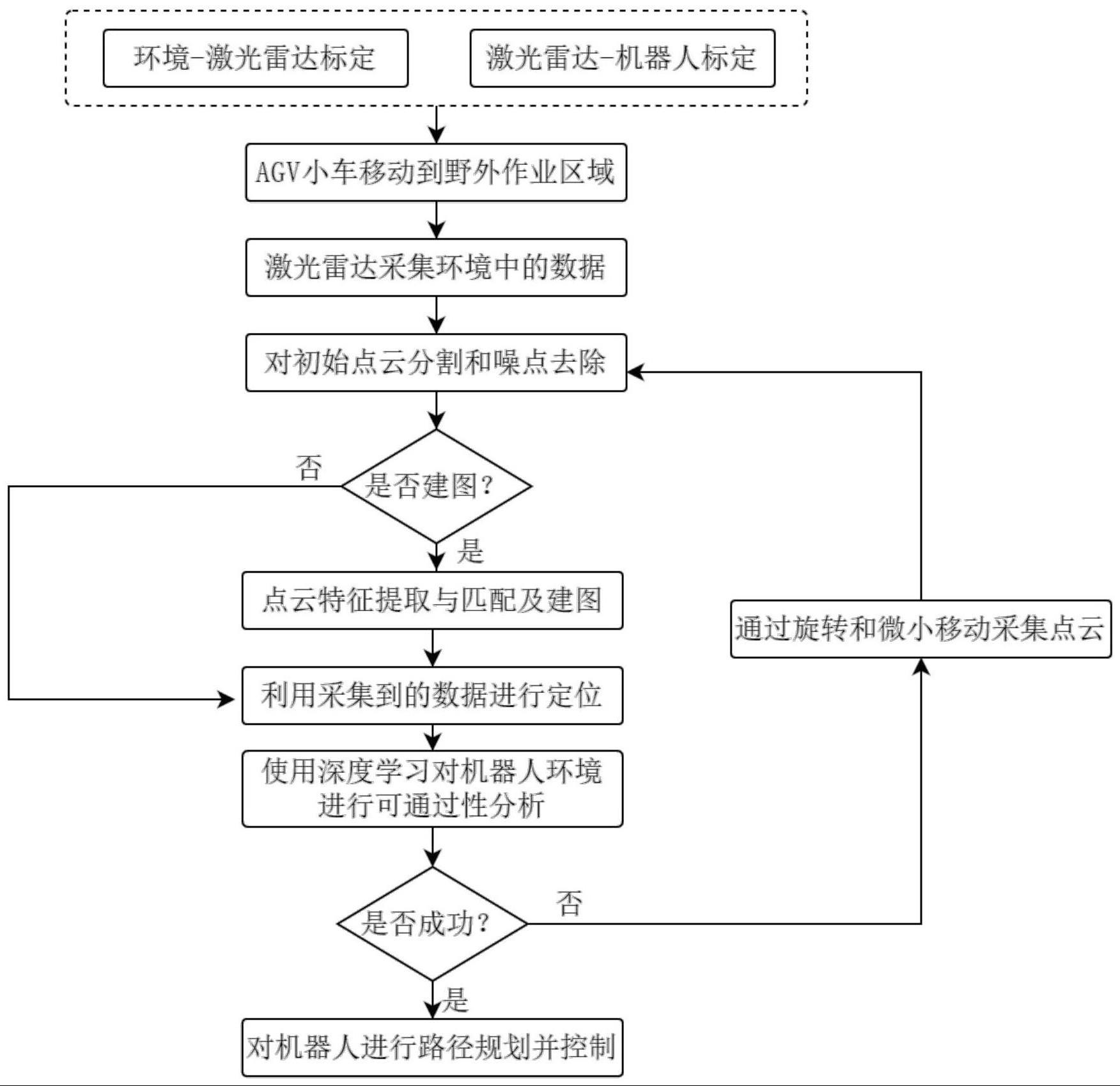
4、机器人在野外作业区域移动过程中,利用激光雷达实时采集野外环境的3d点云数据;
5、采用欧式聚类算法和k-means聚类算法对所述3d点云数据进行分割和噪点去除,获得当前处理好的点云数据;
6、当所述机器人中不存在先验点云地图或先验点云地图和当前处理好的点云数据匹配误差大于误差阈值时,利用当前处理好的点云数据构建三维点云地图,并根据所述三维点云地图获得机器人本体的位姿;
7、根据所述当前处理好的点云数据,采用概率的方式定位机器人本体的当前位置;
8、基于机器人本体的位姿和当前处理好的点云数据,采用深度学习的方法对环境进行可通过性分析;
9、若可通过性分析失败,则在当前位置利用激光雷达再次采集野外环境的点云数据,并返回步骤“采用欧式聚类算法和k-means聚类算法对所述3d点云数据进行分割和噪点去除,获得当前处理好的点云数据”;
10、若可通过性分析成功,则依据可通过性分析的结果在当前位置和目标位置之间进行路径规划,并根据规划的路径控制机器人到达目标位置;
11、当所述机器人中存在先验点云地图且先验点云地图和当前处理好的点云数据匹配误差小于或等于误差阈值时,根据所述先验点云地图获得机器人本体的位姿,并返回步骤“基于机器人本体的位姿和当前处理好的点云数据,采用深度学习的方法对环境进行可通过性分析”。
12、可选地,采用欧式聚类算法和k-means聚类算法对所述3d点云数据进行分割和噪点去除,获得当前处理好的点云数据,之前还包括:
13、利用机器人手-眼标定方法标定激光雷达自身坐标系分别和机器人基坐标系、野外环境之间的位姿变换矩阵;
14、根据所述点云数据的位置坐标,利用公式计算机器人基坐标系下的世界坐标3pi;式中,为激光雷达自身坐标系和机器人基坐标系之间的位姿变换矩阵,4t为激光雷达自身坐标系和野外环境之间的位姿变换矩阵,pi为点云数据的位置坐标。
15、可选地,利用当前处理好的点云数据构建三维点云地图,并根据所述三维点云地图获得机器人本体的位姿,具体包括:
16、对相邻两帧点云数据进行特征提取;
17、将提取的特征进行匹配,构建雷达里程计和三维点云地图;
18、采用卡尔曼滤波的方式融合雷达里程计和三维点云地图,获得机器人本体的位姿。
19、可选地,根据所述当前处理好的点云数据,采用概率的方式定位机器人本体的当前位置,具体包括:
20、对所述当前处理好的点云数据进行三维网格划分;
21、计算每个网格的多维正态分布参数;
22、将所述当前处理好的点云数据转换为机器人基坐标系下的点云数据;
23、根据机器人基坐标系下的点云数据和多维正态分布参数,确定概率分布模型;
24、根据概率分布模型的评分定位机器人本体的当前位置。
25、可选地,基于机器人本体的位姿和当前处理好的点云数据,采用深度学习的方法对环境进行可通过性分析,具体包括:
26、将机器人本体的位姿和当前处理好的点云数据输入一个卷积神经网络,输出可通过性分析的结果。
27、可选地,在当前位置利用激光雷达再次采集野外环境的点云数据,具体包括:
28、在当前位置通过机器人自身的旋转或者移动,利用激光雷达再次采集野外环境的点云数据。
29、可选地,依据可通过性分析的结果在当前位置和目标位置之间进行路径规划,具体包括:
30、依据可通过性分析的结果,采用a*算法或者d*算法在当前位置和目标位置之间进行路径规划。
31、一种面向野外恶劣环境下的自主可通过机器人,包括:agv小车、交换机、工控机和激光雷达;
32、交换机、工控机和激光雷达均设置在agv小车上;
33、激光雷达的信号输出端通过交换机与工控机连接,工控机与agv小车的控制端连接;
34、所述激光雷达用于在agv小车的带动下,对野外环境进行3d点云扫描,实时采集野外环境的3d点云数据,并将所述3d点云数据通过交换机传送至工控机;
35、所述工控机用于根据所述3d点云数据进行可通过性分析,并根据可通过性分析的结果进行实时路径规划,进而按照规划的路径控制agv小车到达目标位置。
36、可选地,在所述agv小车上从下到上依次固定安装交换机、工控机和激光雷达。
37、根据本发明提供的具体实施例,本发明公开了以下技术效果:
38、本发明公开一种面向野外恶劣环境下的机器人自主可通过方法及机器人,通过对激光雷达采集野外环境的3d点云数据进行基于欧式聚类和k-means聚类的分割和噪点去除,提高了数据稳定性,适用于复杂、大尺寸野外恶劣场景;对机器人实时定位采用基于概率的方式求解,减小了整个定位过程的计算量,调高定位的效率;并将机器人的位姿一起纳入可通过性分析中,降低了可通过性分析中的不确定性,解决了机器人野外环境下点云数据量大、定位实时性和可通过性分析精度差的无法自适应学习的问题。
- 还没有人留言评论。精彩留言会获得点赞!