无人机任务路径规划方法、装置、设备和存储介质与流程
本发明涉及无人机飞行路径规划,尤其涉及无人机任务路径规划方法、装置、设备和存储介质。
背景技术:
1、无人机作为近年来新兴的高端技术产品,在很多不同领域内已经有了比较多的应用,例如航拍测绘、灾害搜救、精准农业、管道巡检等。无人机与其他商用飞机不同,其定义为可由远程无线电设备或机载计算机控制的无人驾驶飞行器。尽管无人机具备的短距离内垂直起飞和降落的能力,在一定程度上大大加强了近地飞行的适配性,但在执行配送任务的过程中依然面临巨大挑战。如何在时间紧急、条件复杂的环境下,实现安全高效的无人机自主导航,将会是无人机成功执行任务的决定性因素。路径规划作为无人机自主导航模块的关键性技术,其要求无人机在工作空间当中自主规划出一条从起始点到目标点的无碰撞路径,本质为在可行区域约束条件下的最优化问题。
2、目前无人机任务路径规划大多集中于如何进行规划,以及如何防碰撞等问题,而对于如何实现无人机的自动出库入库任务,以及如何确保无人机按照规划路径飞行等问题鲜有报道。
技术实现思路
1、有鉴于此,本发明的目的是提供无人机任务路径规划方法、装置、设备和存储介质,通过目标检测确定无人机的位置,利用智能规划语言规划无人机的出库/入库路径,并在无人机运动过程中进行角度修正,确保无人机按照规划路径飞行。
2、本发明通过以下技术手段解决上述技术问题:
3、第一方面,本发明提供了一种无人机任务路径规划方法,包括以下步骤:
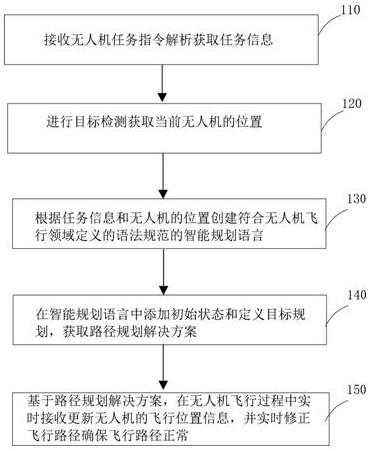
4、接收无人机任务指令解析获取任务信息;
5、进行目标检测获取当前无人机的位置;
6、根据任务信息和无人机的位置创建符合无人机飞行领域定义的语法规范的智能规划语言;
7、在智能规划语言中添加初始状态和定义目标规划,获取路径规划解决方案;
8、基于路径规划解决方案,在无人机飞行过程中实时接收更新无人机的飞行位置信息,并实时修正飞行路径确保飞行路径正常。
9、结合第一方面,在一些实施方式中,所述接收无人机任务指令获取任务信息步骤,包括:
10、通过计算校验位和判断错误位校验指令是否有效;
11、解析任务指令数据包按照指定位置得到执行任务的无人机编号;
12、解析任务指令数据包在数据包指定数据位得到无人机任务的目标位置;
13、解析任务指令数据包在指定数据位得到升降平台状态。
14、结合第一方面,在一些实施方式中,所述根据任务信息和无人机位置信息创建符合无人机飞行领域定义的语法规范的智能规划语言,包括:
15、根据任务信息和无人机位置信息创建智能规划语言中的对象;
16、对智能规划语言中的对象分别添加谓词组句形成描述无人机飞行条件的智能规划语言。
17、结合第一方面,在一些实施方式中,所述智能规划语言中的对象包括:无人机对象、升降平台对象、机库对象、起飞位置对象。
18、结合第一方面,在一些实施方式中,所述在无人机飞行过程中实时接收更新无人机的飞行位置信息,并实时修正飞行路径确保飞行路径正常,包括:
19、在规划的无人机飞行路径上添加多个途经点位,第一个途经点位为初始位置,最后一个途经点位为目标位置;
20、在无人机飞行过程中对无人机做目标检测,实时更新无人机的位置信息;
21、通过目标检测检测无人机的机头位置和机身位置,通过机头位置和机身位置连线计算无人机的当前角度,通过当前角度和预设角度的比较对无人机进行角度修正,确保无人机经过所有途经点。
22、结合第一方面,在一些实施方式中,所述无人机任务路径规划方法执行中,在无人机飞行过程中做碰撞检测确保无人机不会发生碰撞。
23、结合第一方面,在一些实施方式中,所述在无人机运动过程中做碰撞检测确保无人机不会发生碰撞,包括:
24、通过目标检测获取当前执行任务的无人机位置;
25、为当前执行任务的无人机添加一个圆形区域,判断当前无人机圆心和其他无人机圆心之间的距离如果距离小于2r,则控制无人机转向避免碰撞 ;
26、通过目标检测获取甲板层和机库边界信息,判断无人机和边界距离确保不会和边界发生碰撞。
27、第二方面,本发明提供了一种无人机任务路径规划装置,包括:
28、第一信息获取模块,用于接收无人机任务指令解析获取任务信息;
29、第二信息获取模块,用于进行目标检测获取当前无人机的位置;
30、语言创建模块,用于根据任务信息和无人机的位置创建符合无人机飞行领域定义的语法规范的智能规划语言;
31、解决方案获取模块,用于在智能规划语言中添加初始状态和定义目标规划,获取路径规划解决方案;
32、实时修正模块,用于基于路径规划解决方案,在无人机飞行过程中实时接收更新无人机的飞行位置信息,并实时修正飞行路径确保飞行路径正常。
33、第三方面,本发明提供了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器存储有至少一段程序,所述至少一段程序由所述处理器加载并执行以实现如前所述的无人机任务路径规划方法。
34、第四方面,本发明提供了一种计算机可读存储介质,所述可读存储介质中至少有一段程序,所述至少一段程序由所述处理器加载并执行以实现如前所述的无人机任务路径规划方法。
35、本发明的无人机任务路径规划方法、装置、设备和存储介质,首先根据当前无人机数量创建无人机对象、创建升降平台对象、创建机库对象、创建起飞位置对象等,然后为所有对象添加谓词,为无人机对象、升降平台对象等添加属性,接着根据目标检测结果初始化初始状态,然后根据指令确定目标状态即无人机的目标位置,最后添加动作和操作无人机,升降平台可以上升下降,最后使用智能规划语言规划无人机的任务路径,并通过目标检测返回的无人机的位置信息,并确保无人机不会发生碰撞。本发明通过目标检测确定无人机的位置,利用智能规划语言规划无人机的出库/入库路径,并在无人机运动过程中进行角度修正,确保无人机按照规划路径飞行。
技术特征:
1.无人机任务路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的无人机任务路径规划方法,其特征在于,所述接收无人机任务指令获取任务信息步骤,包括:
3.根据权利要求2所述的无人机任务路径规划方法,其特征在于,所述根据任务信息和无人机位置信息创建符合无人机飞行领域定义的语法规范的智能规划语言,包括:
4.根据权利要求3所述的无人机任务路径规划方法,其特征在于,所述智能规划语言中的对象包括:无人机对象、升降平台对象、机库对象、起飞位置对象。
5.根据权利要求4所述的无人机任务路径规划方法,其特征在于,所述在无人机飞行过程中实时接收更新无人机的飞行位置信息,并实时修正飞行路径确保飞行路径正常,包括:
6.根据权利要求1-5任一项所述的无人机任务路径规划方法,其特征在于,所述无人机任务路径规划方法执行中,在无人机飞行过程中做碰撞检测确保无人机不会发生碰撞。
7.根据权利要求6所述的无人机任务路径规划方法,其特征在于,所述在无人机运动过程中做碰撞检测确保无人机不会发生碰撞,包括:
8.无人机任务路径规划装置,其特征在于,包括:
9.一种计算机设备,其特征在于,所述计算机设备包括处理器和存储器,所述存储器存储有至少一段程序,所述至少一段程序由所述处理器加载并执行以实现如权利要求1-7任一项所述的无人机任务路径规划方法。
10.一种计算机可读存储介质,其特征在于,所述可读存储介质中至少有一段程序,所述至少一段程序由所述处理器加载并执行以实现如权利要求1-7任一项所述的无人机任务路径规划方法。
技术总结
本发明涉及无人机飞行路径规划技术领域,尤其涉及无人机任务路径规划方法、装置、设备和存储介质,规划方法首先根据当前无人机数量创建无人机对象、创建升降平台对象、创建机库对象、创建起飞位置对象等,然后为所有对象添加谓词,接着根据目标检测结果初始化初始状态,然后根据任务指令确定目标状态即无人机的目标位置,最后添加动作和操作无人机;升降平台可以上升下降,最后使用智能规划语言规划无人机的任务路径,并通过目标检测返回无人机的位置信息并确保无人机不会发生碰撞。本发明通过目标检测确定无人机的位置,利用智能规划语言规划无人机的出库/入库路径,并在无人机运动过程中进行角度修正,确保无人机按照规划路径飞行。
技术研发人员:王兰春
受保护的技术使用者:成都瀚蓝科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!