一种基于惯导系统的飞机自动调姿方法与流程
本发明属于飞机姿态调整的,具体涉及一种基于惯导系统的飞机自动调姿方法。
背景技术:
1、在飞机称重等调试维护工作中,常需要调整飞机姿态,使之满足要求。目前,在生产实践中,先使用千斤顶顶起飞机,准备好水平仪、卷尺等工具,通过测量机上几组水平测量点之间的位置关系,进而调整并确定飞机姿态。然而,由于水平仪位姿、卷尺精度、光照条件等因素,使用该方法进行飞机调姿时通常耗时较长,且精度不高,不能很好地满足对于飞机姿态要求较高的使用场景。另外,目前所使用的千斤顶大多靠人力顶升,且在调姿过程中往往需要频繁调整顶升高度,不仅消耗体力,且升降精度不高、速度较慢。
2、目前,惯导系统广泛用于航空航天、制导武器等领域,能实时反映飞机航向、俯仰、横滚等姿态信息。其中,捷联式惯性导航系统具有可靠性高、功能强、重量轻、成本低、精度高以及使用灵活等优点,已经成为当今惯性导航系统发展的主流。伺服电机具有精度高、高速性能好、抗过载能力强、运行稳定等优点,普遍应用于机床、激光加工设备、机器人等对工艺精度、加工效率和工作可靠性等要求相对较高的系统。因此,可以考虑从飞机惯导系统读取姿态信息,用于飞机调姿工序,同时使用伺服电机驱动千斤顶升降,实现飞机姿态高精度、自动化的快速调整。
技术实现思路
1、本发明的目的在于提供一种基于惯导系统的飞机自动调姿方法,可实现飞机高精度、自动化调姿,减轻机务工作强度;在调姿过程中,无需在飞机表面放置多余组件,避免损坏飞机表面结构。
2、本发明主要通过以下技术方案实现:
3、一种基于惯导系统的飞机自动调姿方法,在飞机的机头下方设置有前千斤顶,且在飞机的左右机翼下方分别设置有左千斤顶、右千斤顶;包括以下步骤:
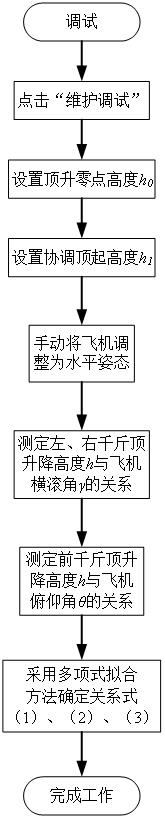
4、步骤s100:调试:
5、步骤s110:分别设置前千斤顶、左千斤顶、右千斤顶的顶升零点高度,然后设置前千斤顶、左千斤顶、右千斤顶的协调顶起顶升高度;
6、步骤s120:将飞机调整为水平姿态,其中|γ|≤∈γ、|θ|≤∈θ,γ为飞机的横滚角,θ为飞机的俯仰角,∈γ为横滚角允许误差,∈θ为俯仰角允许误差;
7、步骤s130:以机头处为坐标原点建立坐标系oxyz,且x轴为逆航向方向,xoy面为水平面;前千斤顶、左千斤顶、右千斤顶的坐标分别为:q10(x10,y10,z10)、q20(x20,y20,z20)、q30(x30,y30,z30),且x20=x30,、y20+y30=0、y10=0;
8、计算前千斤顶、左千斤顶、右千斤顶所在平面q0的法向量为:
9、
10、飞机惯导系统的水平面g0的法向量为:
11、
12、将分别投影到xoz面和yoz面,有投影向量:
13、
14、此时,平面q0与平面g0的夹角为平面q0与平面g0的夹角余弦为:
15、
16、步骤s140:测定左千斤顶、右千斤顶的升降高度h与飞机横滚角的关系;测定前千斤顶的升降高度h与飞机俯仰角θ的关系;
17、使左千斤顶升降高度h,前千斤顶、左千斤顶、右千斤顶的坐标分别为:q11(x10,y10,z10)、q21(x20,y20,z20+h)、q31(x30,y30,z30),计算出前千斤顶、左千斤顶、右千斤顶所在平面q1的法向量:
18、
19、此时飞机惯导系统的水平面g1的法向量为平面q1与平面g1的夹角为的,假设飞机为刚体,则和相等:
20、
21、对比前后飞机惯导系统的法向量变化,将其投影到xoz面,便可求得左千斤顶升降高度h后飞机横滚角变化量的余弦值:
22、
23、由此可求出左千斤顶升降高度h与飞机横滚角变化量之间的函数关系;
24、cosγ2=γ2(h)
25、由于飞机在调姿过程中机身存在变形,故需引入修正函数α2(h),对于左千斤顶,修正后的函数关系式:
26、α2(h)cosγ2=γ2(h)
27、α2(h)为横滚角修正函数;
28、整理可得:
29、γ2=f2(h) (1)
30、其中,
31、
32、同理可以得到:
33、右千斤顶升降高度h与飞机横滚角γ3之间的函数关系:
34、γ3=f3(h) (2)
35、前千斤顶升降高度h与飞机俯仰角θ1之间的函数关系:
36、θ1=f1(h) (3)
37、步骤s200:调姿:
38、步骤s210:设置飞机目标姿态:目标横滚角γ0与目标俯仰角θ0;
39、步骤s220:根据公式(1)或公式(2),通过控制升降左千斤顶或右千斤顶,调整飞机的横滚角γ至目标值γ0,|γ-γ0|≤∈γ;
40、步骤s230:根据公式(3),控制前千斤顶调整俯仰角θ至目标俯仰角θ0,|θ-θ0|≤∈θ。
41、为了更好地实现本发明,进一步地,所述步骤s140中采用多项式拟合方法确定公式(1):
42、步骤s141:固定每次的左千斤顶的顶升高度h0,依次顶升h0,记录此时顶升后的高度h与横滚角γ2的数据;
43、步骤s142:根据统计记录的多次h与γ2的数值,建立基于机器学习算法的h到γ2的网络模型,最终得到:
44、γ2=a0+a1h+a2h2+...anhn。
45、为了更好地实现本发明,进一步地,所述步骤s142中机器学习算法选用多元回归模型或者神经元模型。
46、为了更好地实现本发明,进一步地,所述步骤s142中随着训练模型变量的增加,选用树模型算法实现h与γ2对应关系的建立。
47、为了更好地实现本发明,进一步地,采用多项式拟合方法确定公式(2)、公式(3)。
48、为了更好地实现本发明,进一步地,步骤s220中,根据公式(1),通过控制升降左千斤顶调整飞机的横滚角的步骤如下:
49、步骤s221:在飞机协调顶起之后,左千斤顶的位置为q20(x20,y20,z20),对比此时的飞机的横滚角γ至目标值γ0,由公式(1)求解得到左千斤顶需要升降的高度h1,控制左千斤顶第一次升降;
50、步骤s222:控制左千斤顶第一次升降后,再次对比此时的飞机的横滚角γ至目标值γ0,若满足|γ-γ0|≤∈γ,则结束调姿过程,否则,再次通过公式(1)求解得到左千斤顶需要升降的高度h2,控制左千斤顶第二次升降;
51、步骤s223:控制左千斤顶第二次升降后,再次对比此时的飞机的横滚角γ至目标值γ0,若满足|γ-γ0|≤∈γ,则结束调姿过程,否则,控制左千斤顶升降高度h3,其中,h3=h2/2控制左千斤顶第二次升降;
52、步骤s224:重复步骤s223,每次控制左千斤顶升降的高度为前一次的一半,即直到调整飞机的横滚角满足|γ-γ0|≤∈γ。
53、为了更好地实现本发明,进一步地,通过控制升降右千斤顶调整飞机的横滚角的方法,与通过控制升降左千斤顶调整飞机的横滚角的方法相同。
54、为了更好地实现本发明,进一步地,通过控制前千斤顶调整俯仰角至目标值|θ-θ0|≤∈θ的方法,与通过控制升降左千斤顶调整飞机的横滚角的方法相同。
55、本发明的有益效果:
56、本发明旨在简化飞机调姿工序、提高工作效率、减轻机务劳动强度、便于操作使用。本发明可实现飞机高精度、自动化调姿,减轻机务工作强度;在调姿过程中,无需在飞机表面放置多余组件,避免损坏飞机表面结构。本发明简化了飞机调姿工序,提高了工作效率;本发明操作简单,方便使用,具有较好的实用性。
- 还没有人留言评论。精彩留言会获得点赞!