一种时滞非线性系统的运行优化控制方法
本发明涉及工业控制,具体为一种时滞非线性系统的运行优化控制方法。
背景技术:
1、复杂工业过程的运行控制通常由两层结构组成,分别是上层的优化控制层和底层的回路控制层。上层通过优化相关的生产性能函数(如经济利润或生产成本),为下层控制回路产生适当的设定值;下层实现被控变量对设定值的跟踪,从而使整个系统运行在最优稳态附近。
2、实际工业过程复杂,时滞现象广泛存在于实际工业过程中,例如化工石油、电力运输、冶金和制药等工业生产过程及其他实际系统。从本质上来说时滞系统是一种特殊的无限维系统。它的一个重要特性是,其状态变化不仅依赖于当前的状态,也依赖过去的状态。因而,与无时滞的系统相比,时滞系统具有更加复杂的动态特性。由于时滞的存在,使得被控量不能及时反映系统所承受的扰动,从而产生明显的超调和较长的调节时间,影响系统的性能指标,甚至造成系统的不稳定。因此,时滞系统的研究具有重要的理论意义和实际应用价值。
3、实际工业过程中往往存在着不可预知的干扰,这些干扰会导致系统的动态误差,从而影响系统的性能。处理扰动的常见方法是调整回路控制层中的相关控制参数或结构,然而在许多工业生产过程中,控制器常与生产线一起安装,如果后期再调整控制器的结构,很可能造成大量的资源损耗等问题,而且调整控制器参数对整个系统运行优化的效果有限。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种时滞非线性系统的运行优化控制方法,解决了在许多工业生产过程中,控制器常与生产线一起安装,如果后期再调整控制器的结构,很可能造成大量的资源损耗,而且调整控制器参数对整个系统运行优化的效果有限的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
5、第一方面,提供了一种时滞非线性系统的运行优化控制方法,包括:
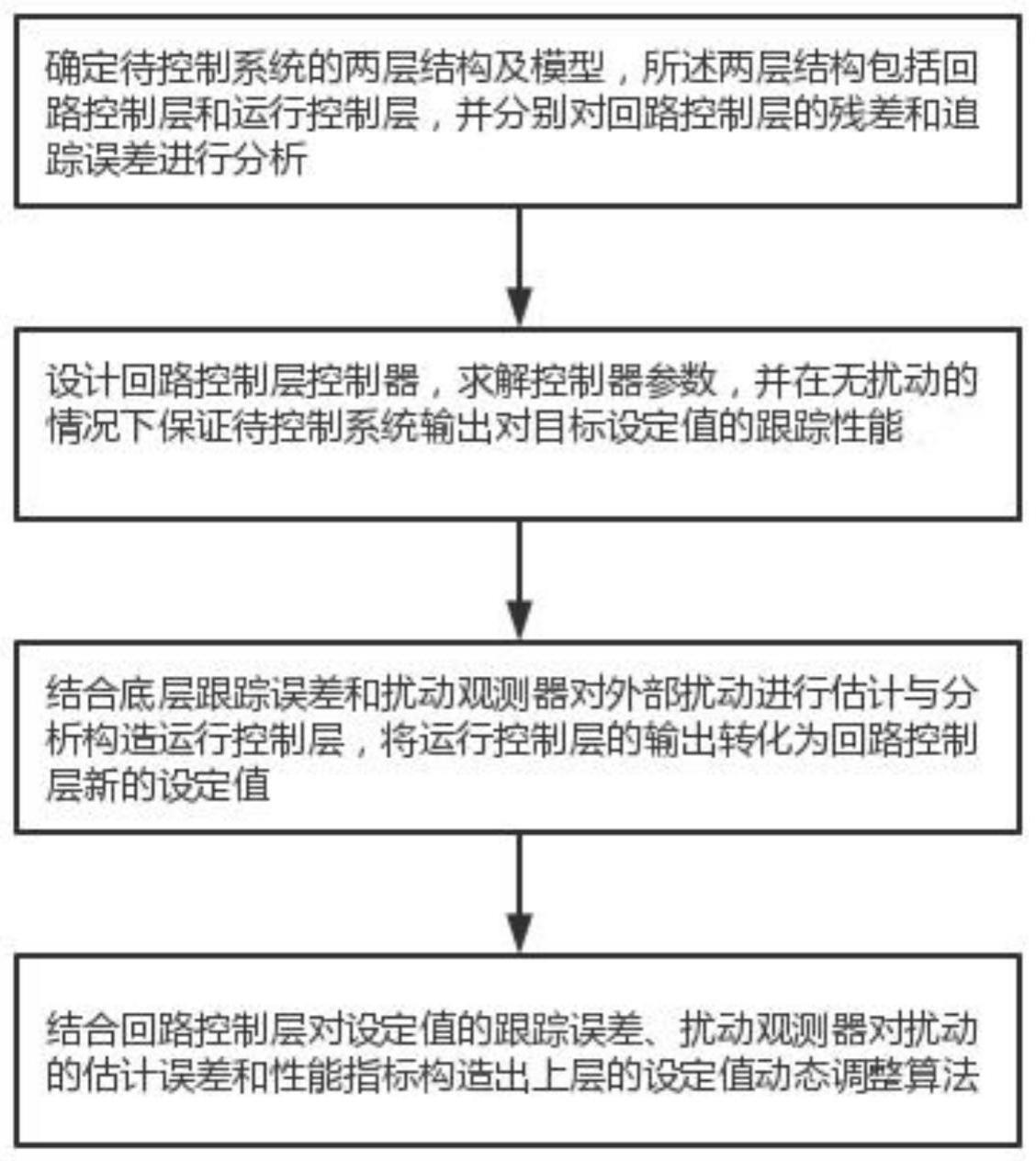
6、确定待控制系统的两层结构及模型,所述两层结构包括回路控制层和运行控制层,并分别对回路控制层的残差和追踪误差进行分析;
7、设计回路控制层控制器,求解控制器参数,并在无扰动的情况下保证待控制系统输出对目标设定值的跟踪性能;
8、结合底层跟踪误差和扰动观测器对外部扰动进行估计与分析构造运行控制层,将运行控制层的输出转化为回路控制层新的设定值;
9、结合回路控制层对设定值的跟踪误差、扰动观测器对扰动的估计误差和性能指标构造出上层的设定值动态调整算法。
10、优选的,所述待控制系统的回路控制层具体为:
11、
12、其中,t表示系统运行的时间,是系统状态向量,表示系统状态对时间t的导数,是系统输出,是系统输入,t表示矩阵的转置,a,b,c为已知的且具有适当维数的系数矩阵,φ(t)为系统的初始状态,d1(t)=diag{d1(t),…,dn(t)}是h2范数有界的外部扰动,d0(t)可由外部系统表示:
13、
14、其中,ξ(t)表示外部系统的状态,系数矩阵为时滞项为d=0.5;
15、没有干扰时的动态回路控制层:
16、
17、其中,系数矩阵为时变时滞为d1=0.5t,非线性项为系统的初始状态选择为设定值选择为
18、优选的,所述回路控制层的残差和追踪误差定义为:
19、e(t)=r(t)-y(t)
20、ε(t)=r*(t)-y(t)
21、其中,e(t)表示残差,ε(t)表示追踪误差,r(t)是待确定的运行层的重设值,r*(t)是追踪目标。
22、优选的,所述回路控制层控制器,求解控制器参数,具体包括:
23、待控制系统处于理想状态下,不存在干扰时,
24、ε(t)=e(t)=r*(t)-y(t)
25、系统的输入即控制器的输出u(t)为:
26、
27、令系数矩阵c=i,能够得到追踪误差:
28、
29、定义
30、
31、控制率等价于从而回路控制层的系统可整理为:
32、
33、其中,
34、
35、对于给定λ1>0,μi>0(i=1,2),基于线性矩阵不等式方法和schur引理,通过求解以下线性矩阵不等式得到参数q,r;
36、
37、其中
38、
39、控制器参数可由如下方法求得
40、求得控制器的参数为:
41、
42、优选的,所述结合底层跟踪误差和扰动观测器对外部扰动进行估计与分析构造运行控制层,具体包括:
43、设计扰动观测器估计扰动,消除和减小扰动对系统性能的影响,设计干扰观测器如下:
44、
45、其中,v(t)是辅助变量,d是已知的系数,l是待确定的增益;
46、定义观测误差进一步的,得观测误差为:
47、
48、存在干扰时,得到:
49、
50、优选的,所述结合回路控制层对设定值的跟踪误差、扰动观测器对扰动的估计误差和性能指标构造出上层的设定值动态调整算法,具体包括:
51、当系统存在扰动时,对于跟踪目标r*(t),可将设定层的动态模型构造为
52、
53、其中,e3=(0 0 mt(t))t,
54、
55、其中,
56、定义状态矩阵则复合系统如下:
57、
58、其中,
59、
60、干扰观测器和设定值调整率中的未知参数p>0,l,可基于线性矩阵不等式方法和schur补引理求解下列线性不等式得到:
61、
62、其中,
63、
64、
65、优选的,所述性能指标具体为:
66、j=(r1*(t)-y1(t))2+(r2*(t)-y2(t))2
67、其中,j表示性能指标,r*(t)是设定值,yi(t)是系统输出。
68、第二方面,提供了一种时滞非线性系统的运行优化控制系统,包括:
69、预处理模块,用于确定待控制系统的两层结构及模型,所述两层结构包括回路控制层和运行控制层,并分别对待控制系统的残差和追踪误差进行分析;
70、求解模块,用于设计回路控制层控制器,求解控制器参数,并在无扰动的情况下保证待控制系统输出对目标设定值的跟踪性能;
71、分析模块,用于结合底层跟踪误差和扰动观测器对外部扰动进行估计与分析构造运行控制层,将运行控制层的输出转化为回路控制层新的设定值;
72、整合模块,用于结合回路控制层对设定值的跟踪误差、扰动观测器对扰动的估计误差和性能指标构造出上层的设定值动态调整算法。
73、第三方面,提供了一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行所述的方法中的任一方法。
74、第四方面,提供了一种计算设备,包括:
75、一个或多个处理器、存储器以及一个或多个程序,其中一个或多个程序存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行所述的方法中的任一方法的指令。
76、(三)有益效果
77、本发明一种时滞非线性系统的运行优化控制方法,解决了在许多工业生产过程中,控制器常与生产线一起安装,如果后期再调整控制器的结构,很可能造成大量的资源损耗,而且调整控制器参数对整个系统运行优化的效果有限的问题。
- 还没有人留言评论。精彩留言会获得点赞!