数据处理方法、装置及自动驾驶台架与流程
本发明涉及自动驾驶,具体而言,涉及一种数据处理方法、装置及自动驾驶台架。
背景技术:
1、自动驾驶技术近些年处于高速发展的过程中,该技术是指自动驾驶车辆利用车载传感器实时获取车辆运行周围环境的信息,并且在没有人为操作干预的前提下,能够根据信息的变化,自主改变车辆的行驶行为,完成规定的目标驾驶任务。因此要实现自动驾驶,需要实现多种高科技的综合应用,比如环境感知、计算优化以及多种辅助驾驶等等,为实现这一目的需要运用计算机视觉、数据融合、传感器等多种技术。在上述这些技术中,计算机视觉通常是自动驾驶数据处理的起点,且自动驾驶车辆运行环境的信息是支撑自动驾驶正常运行最基础的数据。
2、在训练依靠视觉传感器的自动驾驶深度卷积神经网络时,需要大量的视觉图像和车辆控制量信息,且应包含这两种信息间的对应关系。传统上,需要驾驶员手动驾驶车辆,按照预先设定的路线反复行驶,通过传感器硬件及数据采集脚本采集数据,用于后续的训练工作。
3、驾驶员手动驾驶车辆采集视觉图像和车辆控制量信息的方法需要占用一名驾驶员长时间驾驶车辆,效率低下;且采集到的训练集不可避免地包含了驾驶员的驾驶习惯信息,导致训练结果也在某种行为模式上具有一定的倾向性。
技术实现思路
1、为解决现有存在的技术问题,本发明实施例提供一种数据处理方法、装置及自动驾驶台架。
2、第一方面,本发明实施例提供了一种数据处理方法,包括:
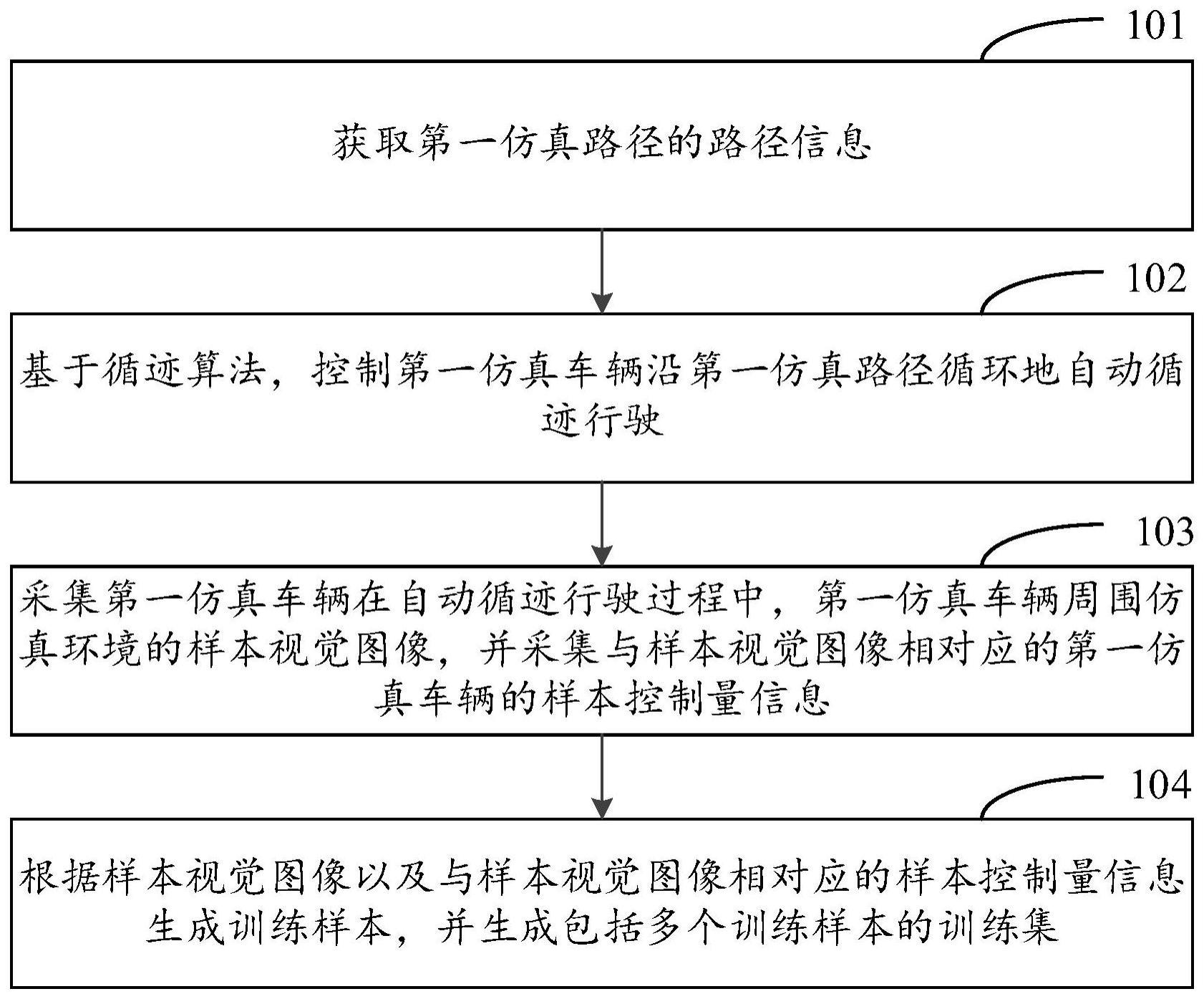
3、获取第一仿真路径的路径信息,所述路径信息包括所述第一仿真路径的多个路径坐标;所述第一仿真路径为首尾相接的闭环路径;
4、基于循迹算法,控制第一仿真车辆沿所述第一仿真路径循环地自动循迹行驶;
5、采集所述第一仿真车辆在自动循迹行驶过程中,所述第一仿真车辆周围仿真环境的样本视觉图像,并采集与所述样本视觉图像相对应的所述第一仿真车辆的样本控制量信息;
6、根据所述样本视觉图像以及与所述样本视觉图像相对应的所述样本控制量信息生成训练样本,并生成包括多个所述训练样本的训练集。
7、在一种可能的实现方式中,所述获取第一仿真路径的路径信息,包括:
8、接收用户输入的用于控制所述第一仿真车辆的控制指令,基于所述控制指令控制所述第一仿真车辆沿所述第一仿真路径行驶,并记录所述第一仿真车辆的位置坐标;
9、将所述第一仿真车辆沿完整的所述第一仿真路径行驶时所采集到的所述位置坐标均作为所述第一仿真路径的路径坐标,形成所述第一仿真路径的路径信息。
10、在一种可能的实现方式中,所述基于循迹算法,控制第一仿真车辆沿所述第一仿真路径循环地自动循迹行驶,包括:
11、每间隔一段时间,为所述第一仿真车辆添加扰动量,所述扰动量用于使所述第一仿真车辆偏离所述第一仿真路径;
12、在经过预设时长后,停止添加所述扰动量,并基于循迹算法,控制第一仿真车辆回到所述第一仿真路径。
13、在一种可能的实现方式中,所述为所述第一仿真车辆添加扰动量,包括:
14、为所述第一仿真车辆添加满足正态分布的横向扰动量和/或纵向扰动量;所述横向扰动量用于改变所述第一仿真车辆的航向,所述纵向扰动量用于改变所述第一仿真车辆的速度。
15、在一种可能的实现方式中,该方法还包括:
16、在添加所述扰动量的过程中,不采集所述样本视觉图像和所述样本控制量信息。
17、在一种可能的实现方式中,添加所述扰动量的总时长与总采集时长之间的比值在1:100至1:4之间。
18、在一种可能的实现方式中,所述根据所述样本视觉图像以及与所述样本视觉图像相对应的所述样本控制量信息生成训练样本,包括:
19、将所述样本视觉图像以及与所述样本视觉图像相对应的所述样本控制量信息作为训练样本;以及
20、将与所述样本视觉图像左右镜像对称的视觉图像,以及与相对应的样本控制量信息左右镜像对称的控制量信息作为训练样本。
21、在一种可能的实现方式中,在所述生成包括多个训练样本的训练集之后,该方法还包括:
22、根据所述训练集对预设的模型进行训练,生成自动驾驶神经网络;
23、在第二仿真车辆位于第二仿真路径的情况下,采集所述第二仿真车辆周围仿真环境的当前视觉图像,将所述当前视觉图像输入至所述自动驾驶神经网络,根据所述自动驾驶神经网络的输出结果确定相应的当前控制量信息;
24、根据所述当前控制量信息控制所述第二仿真车辆沿所述第二仿真路径行驶。
25、在一种可能的实现方式中,在所述根据所述自动驾驶神经网络的输出结果确定相应的当前控制量信息之后,该方法还包括:
26、根据所述当前控制量信息控制线控底盘动作。
27、第二方面,本发明实施例还提供了一种数据处理装置,包括:
28、获取模块,用于获取第一仿真路径的路径信息,所述路径信息包括所述第一仿真路径的多个路径坐标;所述第一仿真路径为首尾相接的闭环路径;
29、循迹模块,用于基于循迹算法,控制第一仿真车辆沿所述第一仿真路径循环地自动循迹行驶;
30、采集模块,用于采集所述第一仿真车辆在自动循迹行驶过程中,所述第一仿真车辆周围仿真环境的样本视觉图像,并采集与所述样本视觉图像相对应的所述第一仿真车辆的样本控制量信息;
31、生成模块,用于根据所述样本视觉图像以及与所述样本视觉图像相对应的所述样本控制量信息生成训练样本,并生成包括多个所述训练样本的训练集。
32、第三方面,本发明实施例提供了一种自动驾驶台架,包括:显示屏、摄像头和处理器,所述显示屏、所述摄像头均与所述处理器相连;
33、所述显示屏用于显示仿真车辆沿仿真路径行驶时周围的仿真环境;
34、所述摄像头用于用于采集所述显示屏所显示的仿真环境,形成视觉图像,并将所述视觉图像发送至所述处理器;
35、所述处理器用于执行如上所述的数据处理方法。
36、在一种可能的实现方式中,自动驾驶台架还包括线控底盘,所述线控底盘与所述处理器相连;所述线控底盘用于接收所述处理器发送的控制量信息,并执行相应的动作。
37、在一种可能的实现方式中,所述线控底盘包括能够注入故障的实体故障点和虚拟故障点;
38、所述实体故障点包括:线控信号故障点、线控电源故障点、ehb使能信号故障点、档位故障点、油门踏板电源故障点、自检指示灯故障点、制动指示灯故障点、模式切换故障点、模式切换指示灯故障点中的至少一项;
39、所述虚拟故障点包括:驾驶座无人、电池温度异常、电池电流异常、电池容量不足、bms通讯异常、驱动电机异常、刹车系统异常、车速传感器异常、转向电机异常、超速限速急停、急停按钮急停、前碰撞告警、后碰撞告警中的至少一项。
40、第四方面,本发明实施例提供了一种数据处理设备,包括处理器和存储器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述存储器中存储的计算机程序,所述计算机程序被所述处理器执行时实现上述第一方面所述的数据处理方法。
41、第五方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的数据处理方法。
42、本发明实施例提供的数据处理方法、装置及自动驾驶台架,通过控制第一仿真车辆在虚拟场景中自动循环地沿第一仿真路径行驶,可以采集到足够数量的样本视觉图像和样本控制量信息,从而获取到足够数量的训练样本。该方法不需要利用实际车辆进行采集,可以脱离场地的束缚,也不存在碰撞风险,危险程度低,且采集过程中可以自动循迹,不需要人为参与、监控,效率高,成本低,可以实现独立安全自主地采集训练样本;并且,采用自动循迹的方式控制第一仿真车辆行驶,可以规避掉驾驶员本身的驾驶习惯,所采集到的训练样本能够训练得到更好的模型。
43、采集过程中增加扰动量,可以增加第一仿真车辆沿第一仿真路径行驶时的多样性,能够采集到更丰富的样本视觉图像和样本控制量信息,也可以使得后续训练的模型更加准确。在训练得到自动驾驶神经网络后,可以利用虚拟场景实现模拟实车控制的目的,能够在线验证自动驾驶神经网络,且不需要实车参与,成本低,安全性高。并且,自动驾驶台架也可满足职业院校以及应用型本科相关专业开展实践实操教学活动。
- 还没有人留言评论。精彩留言会获得点赞!