一种基于迭代滑模控制的船舶避碰路径跟踪方法
本发明涉及船舶控制,特别涉及一种基于迭代滑模控制的船舶避碰路径跟踪方法。
背景技术:
1、目前,随着国际贸易的发展,全球海运贸易总量逐年稳步增长,船舶大型化、科技化发展迅速且船舶数量急剧增加,海上航行问题日益严重,船舶跟踪避碰路径行驶的方法越来越重要;船舶在行驶过程中,容易受到航行区域风速与风向、航行区域静态障碍物以及航行区域干扰船舶的行驶的影响,使得船舶无法基于预设规划避碰路径行驶,航行过程存在安全隐患;且船舶在避让回归过程中,存在避让回归路线航行效率低下的问题。
2、因此,本发明提供一种基于迭代滑模控制的船舶避碰路径跟踪方法。
技术实现思路
1、本发明提供一种基于迭代滑模控制的船舶避碰路径跟踪方法,用以通过获取获取当前船舶即将行驶经过的路径区域数据以及路径区域内的干扰船舶的行驶数据,确定对所述当前船舶行驶的第一影响以及第二影响,结合迭代滑模控制所述船舶进行行驶,通过第一行驶以及第二行驶,不仅提高了船舶避让回归效率,而且实现了对船舶避碰规划路径的高精度跟踪,提高了船舶行驶的安全性。
2、本发明提供一种基于迭代滑模控制的船舶避碰路径跟踪方法,包括:
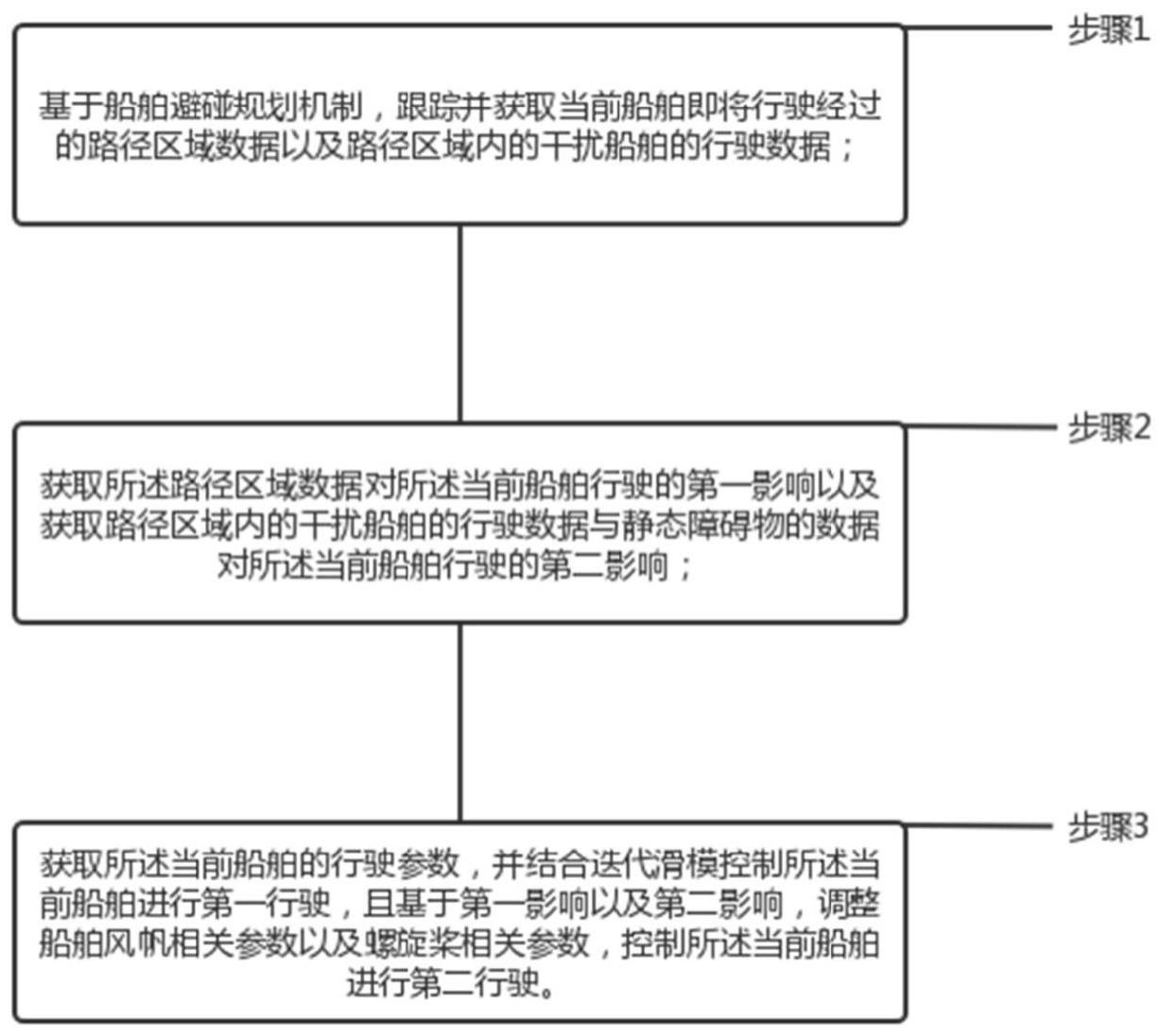
3、步骤1:基于船舶避碰规划机制,跟踪并获取当前船舶即将行驶经过的路径区域数据以及路径区域内的干扰船舶的行驶数据;
4、步骤2:获取所述路径区域数据对所述当前船舶行驶的第一影响以及获取路径区域内的干扰船舶的行驶数据与静态障碍物的数据对所述当前船舶行驶的第二影响;
5、步骤3:获取所述当前船舶的行驶参数,并结合迭代滑模控制所述当前船舶进行第一行驶,且基于第一影响以及第二影响,调整船舶风帆相关参数以及螺旋桨相关参数,控制所述当前船舶进行第二行驶。
6、优选的,基于船舶避碰规划机制,跟踪并获取当前船舶即将行驶经过的路径区域数据以及路径区域内的干扰船舶的行驶数据,包括:
7、基于船舶避碰规划机制,制定船舶第二规划路线,若路径为直线,仅记录船舶第二规划路线;
8、若所述船舶第二规划路线存在拐弯区域,则基于拐弯区域将船舶第二规划路线划分为k段路径区域,跟踪并获取当前船舶即将行驶经过的路径区域数据以及路径区域内的干扰船舶的行驶数据;
9、获取所述当前船舶、干扰船舶以及周边静态障碍物的相关参数数据,包括:即将行驶经过的路径区域位置数据、所述当前船舶的初始点位置数据和目的点位置数据、所述当前船舶的航速和航向、干扰船的初始点位置数据和目的点位置数据、干扰船的航速和航向、周边静态障碍物的数据以及即将行驶经过的路径区域的航行水域风向和风速数据。
10、优选的,获取所述路径区域数据对所述当前船舶行驶的第一影响,包括:
11、基于航行水域风向和风速数据,确定即将行驶经过的路径区域的区域类型;
12、基于即将行驶经过的路径区域的航行水域风向、风速数据以及航行区域类型,确定对所述当前船舶行驶的风力作用;
13、其中,对所述当前船舶行驶的风力作用包括:风对船体的干扰作用以及风对风帆的作用;
14、将所述风力作用记录为所述路径区域数据对所述当前船舶行驶的第一影响。
15、优选的,获取路径区域内的干扰船舶的行驶数据与静态障碍物的数据对所述当前船舶行驶的第二影响,包括:
16、基于所述路径区域内的干扰船舶的第一规划路线、所述当前船舶的第二规划路线以及每个静态障碍物的当下位置,绘制所述路径区域的区域示意图;
17、基于所述区域示意图,确定所述第二规划路线上所存在的每个第一静态障碍物对所述当前船舶的第一轨迹影响因子;
18、基于所述区域示意图,确定所述第二规划路线与每个第一规划路线在同个行驶时间点下的路线重合子域;
19、根据同个第一规划路线与所述第二规划路线所存在的所有路线重合子域,确定所述同个第一规划路线对所述第二规划路线的第二轨迹影响因子;
20、基于所述第一轨迹影响因子以及第二轨迹影响因子,确定对所述当前船舶行驶的第二影响。
21、优选的,确定所述同个第一规划路线对所述第二规划路线的第二轨迹影响因子,包括:
22、根据所述同个第一规划路线对所述第二规划路线的所有路线重合子域,确定所述同个第一规划路线中的每个路线重合子域的重合参数,其中,所述重合参数与路线重合时间、路线重合度、路线重合长度相关;
23、根据所述重合参数,计算所述同个第一规划路线对第二规划路线的第二轨迹影响因子m;
24、
25、其中,n1表示所述同个第一规划路线与所述第二规划路线的路线重合子域的个数;ti表示第i个路线重合子域的路线重合时间;tmax表示预先规划的最大路线重合时间;li表示第i个路线重合子域的路线重合长度;lmax表示预先规划的最大路线重合长度;ni表示第i个路线重合子域所对应的重合时间点个数;dmax表示预先规划的干扰船舶所对应的无影响距离值;dij表示第i个路线重合子域中的第j个重合时间点下的对应干扰船舶与当下船舶的直线距离;表示第i个路线重合子域中的第j个重合时间点下的路线重合度。
26、优选的,基于所述区域示意图,确定所述第二规划路线上所存在的每个第一静态障碍物对所述当前船舶的第一轨迹影响因子,包括:
27、根据每个第一静态障碍物的障碍物形状,确定绕行边界;
28、确定对应第一静态障碍物的绕行边界与第二规划路线的两个交叉点,确定对应的第一轨迹影响因子n;
29、n={x2-x1,pz{jj01,rz,j01},py{jj02,ry,j02}}
30、其中,x2表示绕行边界回归到第二规划路线的交叉点;x1表示绕行边界与基于第二规划路线分离到绕行边界的交叉点;x2-x1表示两个交叉点之间的距离;rz表示开始从第二规划路线左侧行驶到绕行边界的距离;ry表示开始从第二规划路线右侧行驶到绕行边界的距离;pz{jj01,rz,j01}表示左侧行驶到绕行边界之后的左侧行驶过程中的拐弯集合,其中,jj01表示左侧行驶过程中的第j01个拐弯角度;rz,j01表示左侧行驶过程中的第j01个拐弯角度下的行驶距离;py{jj02,ry,j01}表示右侧行驶到绕行边界之后的右侧行驶过程中的拐弯集合,jj02表示右侧行驶过程中的第j02个拐弯角度;ry,j01表示右侧行驶过程中的第j02个拐弯角度下的行驶距离。
31、优选的,基于所述第一轨迹影响因子以及第二轨迹影响因子,确定对所述当前船舶行驶的第二影响,包括:
32、根据所述区域示意图,确定每个第一规划路线与第二规划路线的重合类型,其中,所述重合类型包括:所述当前船舶与干扰船舶存在航线不相交异向航行的重合类型、所述当前船舶与干扰船舶存在航线不相交同向航行的重合类型以及所述当前船舶与干扰船舶存在航线相交航行的重合类型;
33、基于所述重合类型,向每个第二轨迹影响因子分别附加对应的类型权重;
34、同时,确定所述当前船舶的航行方向类型,并根据所述航行方向类型向所述第二规划路线上所存在的第一轨迹影响因子分别附加对应的方向权重;
35、基于第一轨迹影响因子以及向每个第一轨迹影响因子附加的方向权重、第二轨迹因子以及向每个第二轨迹因子附加的类型权重,确定对当前船舶行驶的第二影响。
36、优选的,获取所述当前船舶的行驶参数,并结合迭代滑模控制所述当前船舶进行第一行驶,且基于第一影响以及第二影响,调整船舶风帆相关参数以及螺旋桨相关参数,控制所述当前船舶进行第二行驶,包括:
37、按照所述第二规划路线,控制所述当前船舶进行第一行驶,并获取所述当前船舶基于第一行驶下的状态参数以及行驶参数,其中,所述状态参数与船舶风帆状态参数以及螺旋桨状态参数相关,所述行驶参数与行驶位置相关;
38、判断所述行驶参数是否与第一行驶所对应的标准参数一致;
39、若一致,继续按照所述第二规划路线进行控制行驶;
40、若不一致,则根据所述第一影响以及第二影响,对所述状态参数进行调整,基于迭代滑模函数控制所述当前船舶进行第二行驶,其中,所述第二行驶指的是回归到第二规划路线上行驶。
41、优选的,根据所述第一影响以及第二影响,对所述状态参数进行调整,基于迭代滑模控制所述当前船舶进行第二行驶,包括:
42、获取所述当前船舶基于行驶参数与标准参数的横向误差xe以及纵向误差ye;
43、基于船舶行驶的横向误差xe以及纵向误差ye、第一影响以及第二影响,构建迭代滑模函数;
44、基于迭代滑模函数,控制所述当前船舶回归到第二规划路线。
45、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
46、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!