移动机器人的控制方法及装置、移动机器人与流程
本发明涉及移动机器人控制,具体而言,涉及一种移动机器人的控制方法及装置、移动机器人。
背景技术:
1、移动机器人形式和功能都在不断的变化和革新。然而,当前真正使用的移动机器人的功能还是比较单一的。例如,在家庭、超市以及餐厅等场所,移动机器人要在复杂的环境中实现路径规划以及移动,需要利用激光雷达或者摄像机进行环境建图、定位、导航等。但是,上述技术并未完成成熟,大多数移动机器人仍然采用的是地面定轨方式进行导航。这种方式仍然会存在导航比较单一的缺陷,使得移动机器人只能按照固定移动轨迹移动,灵活性较低。
2、针对上述相关技术中移动机器人只能按照固定移动轨迹移动,灵活性较低的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种移动机器人的控制方法及装置、移动机器人,以至少解决相关技术中移动机器人只能按照固定移动轨迹移动,灵活性较低的技术问题。
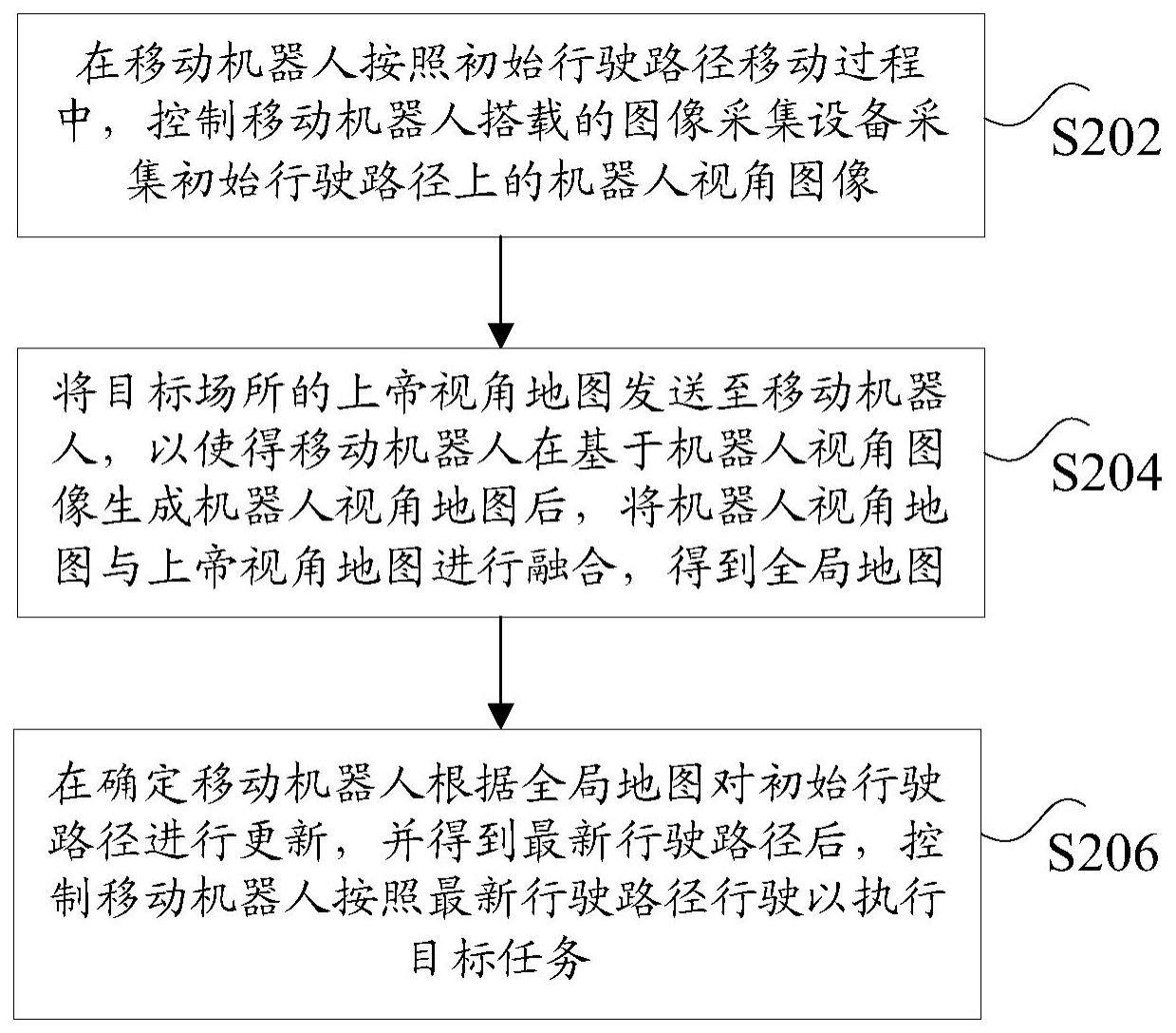
2、根据本发明实施例的一个方面,提供了一种移动机器人的控制方法,包括:在移动机器人按照初始行驶路径移动过程中,控制所述移动机器人搭载的图像采集设备采集所述初始行驶路径上的机器人视角图像,其中,所述初始行驶路径是根据所述移动机器人存储的原始地图生成的行驶路径,所述原始地图是根据原始图像生成的地图,所述原始图像是所述移动机器人在初始化过程中采集的目标场所的图像,所述目标场所是所述移动机器人工作的场所;将所述目标场所的上帝视角地图发送至所述移动机器人,以使得所述移动机器人在基于所述机器人视角图像生成机器人视角地图后,将所述机器人视角地图与所述上帝视角地图进行融合,得到全局地图,其中,所述上帝视角地图是根据上帝视角图像生成的地图,所述上帝视角图像是利用设置于所述目标场所的图像采集设备在上帝视角下采集的图像;在确定所述移动机器人根据所述全局地图对所述初始行驶路径进行更新,并得到最新行驶路径后,控制所述移动机器人按照所述最新行驶路径行驶以执行目标任务。
3、可选地,在控制所述移动机器人搭载的图像采集设备采集所述初始行驶路径上的机器人视角图像之前,该移动机器人的控制方法还包括:在确定所述移动机器人移动至所述目标场所后,向所述移动机器人发送初始化指令,以触发所述移动机器人搭载的图像采集设备采集所述目标场所的基础图像,其中,所述基础图像包括:所述移动机器人搭载的雷达探测到的点云图像和所述移动机器人搭载的深度相机以上帝视角采集的上帝视角图像;控制所述移动机器人基于所述基础图像生成所述原始地图。
4、可选地,将所述目标场所的上帝视角地图发送至所述移动机器人,包括:在检测到所述目标场所存在变化时,利用设置于所述目标场所的图像采集设备以上帝视角采集所述目标场所的最新上帝视角图像;根据所述最新上帝视角图像生成所述上帝视角地图;将所述上帝视角地图发送至所述移动机器人。
5、可选地,将所述目标场所的上帝视角地图发送至所述移动机器人,包括:在探测到所述移动机器人移动至所述目标场所的死角区域时,利用设置于所述目标场所的图像采集设备以上帝视角采集所述目标场所的最新上帝视角图像,其中,所述死角区域是所述移动机器人按照所述初始行驶路径行驶时无法移动出来的区域;根据所述最新上帝视角图像生成所述上帝视角地图;将所述上帝视角地图发送至所述移动机器人。
6、可选地,控制所述移动机器人按照所述最新行驶路径行驶以执行目标任务,包括:根据所述移动机器人实时探测到的障碍物和所述全局地图确定所述移动机器人的避障策略;控制所述移动机器人按照所述最新行驶路径行驶时,根据所述避障策略避开所述障碍物,以执行所述目标任务。
7、可选地,根据所述移动机器人实时探测到的障碍物和所述全局地图确定所述移动机器人的避障策略,包括:确定所述障碍物的属性信息,其中,所述属性信息表示所述障碍物的动静状态;在根据所述属性信息确定所述障碍物为静态障碍物时,确定所述避障策略为:绕开所述静态障碍物;在根据所述属性信息确定所述障碍物为动态障碍物时,确定所述避障策略为:基于所述动态障碍物的移动信息和所述移动机器人的行驶信息加速或减速绕过所述障碍物,其中,所述移动信息至少包括:所述动态障碍物的移动方向和移动速度,所述行驶信息至少包括:所述移动机器人的行驶方向和行驶速度。
8、可选地,基于所述动态障碍物的移动信息和所述移动机器人的行驶信息加速或减速绕过所述障碍物,包括:在基于所述移动信息确定所述动态障碍物的移动方向与所述移动机器人的行驶方向相同,且所述动态障碍物的移动速度小于所述移动机器人的行驶速度时,控制所述移动机器人加速绕过所述动态障碍物;在基于所述移动信息确定所述动态障碍物的移动方向与所述移动机器人的行驶方向相反时,控制所述移动机器人加速绕过所述动态障碍物;在基于所述移动信息确定所述动态障碍物的移动方向与所述移动机器人的行驶方向交叉,且所述动态障碍物的移动速度小于所述移动机器人的行驶速度时,控制所述移动机器人加速绕过所述动态障碍物;在基于所述移动信息确定所述动态障碍物的移动方向与所述移动机器人的行驶方向交叉,且所述动态障碍物的移动速度等于或大于所述移动机器人的行驶速度时,控制所述移动机器人减速绕过所述动态障碍物。
9、可选地,该移动机器人的控制方法还包括:在所述移动机器人出现故障修复后返工时,控制所述移动机器人将其在所述目标场所的当前位置采集的当前视角图像与所述全局地图进行匹配,以定位所述移动机器人在所述全局地图的地图位置。
10、根据本发明实施例的另外一个方面,还提供了一种移动机器人的控制装置,包括:第一控制单元,用于在移动机器人按照初始行驶路径移动过程中,控制所述移动机器人搭载的图像采集设备采集所述初始行驶路径上的机器人视角图像,其中,所述初始行驶路径是根据所述移动机器人存储的原始地图生成的行驶路径,所述原始地图是根据原始图像生成的地图,所述原始图像是所述移动机器人在初始化过程中采集的目标场所的图像,所述目标场所是所述移动机器人工作的场所;融合单元,用于将所述目标场所的上帝视角地图发送至所述移动机器人,以使得所述移动机器人在基于所述机器人视角图像生成机器人视角地图后,将所述机器人视角地图与所述上帝视角地图进行融合,得到全局地图,其中,所述上帝视角地图是根据上帝视角图像生成的地图,所述上帝视角图像是利用设置于所述目标场所的图像采集设备在上帝视角下采集的图像;第二控制单元,用于在确定所述移动机器人根据所述全局地图对所述初始行驶路径进行更新,并得到最新行驶路径后,控制所述移动机器人按照所述最新行驶路径行驶以执行目标任务。
11、可选地,该移动机器人的控制装置还包括:触发单元,用于在控制所述移动机器人搭载的图像采集设备采集所述初始行驶路径上的机器人视角图像之前,在确定所述移动机器人移动至所述目标场所后,向所述移动机器人发送初始化指令,以触发所述移动机器人搭载的图像采集设备采集所述目标场所的基础图像,其中,所述基础图像包括:所述移动机器人搭载的雷达探测到的点云图像和所述移动机器人搭载的深度相机以上帝视角采集的上帝视角图像;第三控制单元,用于控制所述移动机器人基于所述基础图像生成所述原始地图。
12、可选地,所述融合单元,包括:第一采集模块,用于在检测到所述目标场所存在变化时,利用设置于所述目标场所的图像采集设备以上帝视角采集所述目标场所的最新上帝视角图像;第一生成模块,用于根据所述最新上帝视角图像生成所述上帝视角地图;第一发送模块,用于将所述上帝视角地图发送至所述移动机器人。
13、可选地,所述融合单元,包括:第二采集模块,用于在探测到所述移动机器人移动至所述目标场所的死角区域时,利用设置于所述目标场所的图像采集设备以上帝视角采集所述目标场所的最新上帝视角图像,其中,所述死角区域是所述移动机器人按照所述初始行驶路径行驶时无法移动出来的区域;第二生成模块,用于根据所述最新上帝视角图像生成所述上帝视角地图;第二发送模块,用于将所述上帝视角地图发送至所述移动机器人。
14、可选地,所述第二控制单元,包括:第一确定模块,用于根据所述移动机器人实时探测到的障碍物和所述全局地图确定所述移动机器人的避障策略;第一控制模块,用于控制所述移动机器人按照所述最新行驶路径行驶时,根据所述避障策略避开所述障碍物,以执行所述目标任务。
15、可选地,所述第一确定模块,包括:第一确定子模块,用于确定所述障碍物的属性信息,其中,所述属性信息表示所述障碍物的动静状态;第二确定子模块,用于在根据所述属性信息确定所述障碍物为静态障碍物时,确定所述避障策略为:绕开所述静态障碍物;第三确定子模块,用于在根据所述属性信息确定所述障碍物为动态障碍物时,确定所述避障策略为:基于所述动态障碍物的移动信息和所述移动机器人的行驶信息加速或减速绕过所述障碍物,其中,所述移动信息至少包括:所述动态障碍物的移动方向和移动速度,所述行驶信息至少包括:所述移动机器人的行驶方向和行驶速度。
16、可选地,所述第三确定子模块,包括:第一控制子模块,用于在基于所述移动信息确定所述动态障碍物的移动方向与所述移动机器人的行驶方向相同,且所述动态障碍物的移动速度小于所述移动机器人的行驶速度时,控制所述移动机器人加速绕过所述动态障碍物;第二控制子模块,用于在基于所述移动信息确定所述动态障碍物的移动方向与所述移动机器人的行驶方向相反时,控制所述移动机器人加速绕过所述动态障碍物;第三控制子模块,用于在基于所述移动信息确定所述动态障碍物的移动方向与所述移动机器人的行驶方向交叉,且所述动态障碍物的移动速度小于所述移动机器人的行驶速度时,控制所述移动机器人加速绕过所述动态障碍物;第四控制子模块,用于在基于所述移动信息确定所述动态障碍物的移动方向与所述移动机器人的行驶方向交叉,且所述动态障碍物的移动速度等于或大于所述移动机器人的行驶速度时,控制所述移动机器人减速绕过所述动态障碍物。
17、可选地,该移动机器人的控制装置还包括:第四控制单元,用于在所述移动机器人出现故障修复后返工时,控制所述移动机器人将其在所述目标场所的当前位置采集的当前视角图像与所述全局地图进行匹配,以定位所述移动机器人在所述全局地图的地图位置。
18、根据本发明实施例的另外一个方面,还提供了一种移动机器人,所述移动机器人使用上述中任一项所述的移动机器人的控制方法。
19、根据本发明实施例的另外一个方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,所述程序执行上述中任意一项所述的移动机器人的控制方法。
20、根据本发明实施例的另外一个方面,还提供了一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行上述中任意一项所述的移动机器人的控制方法。
21、在本发明实施例中,在移动机器人按照初始行驶路径移动过程中,控制移动机器人搭载的图像采集设备采集初始行驶路径上的机器人视角图像,其中,初始行驶路径是根据移动机器人存储的原始地图生成的行驶路径,原始地图是根据原始图像生成的地图,原始图像是移动机器人在初始化过程中采集的目标场所的图像,目标场所是移动机器人工作的场所;将目标场所的上帝视角地图发送至移动机器人,以使得移动机器人在基于机器人视角图像生成机器人视角地图后,将机器人视角地图与上帝视角地图进行融合,得到全局地图,其中,上帝视角地图是根据上帝视角图像生成的地图,上帝视角图像是利用设置于目标场所的图像采集设备在上帝视角下采集的图像;在确定移动机器人根据全局地图对初始行驶路径进行更新,并得到最新行驶路径后,控制移动机器人按照最新行驶路径行驶以执行目标任务。通过本发明提供的移动机器人的控制方法,实现了移动机器人可以根据上帝视角和其自身视角来完成避障功能的目的,可以灵活的在工作场所移动,不用受限于固定的移动轨迹,提高了移动机器人的灵活性,同时也提高了移动机器人的工作效率,进而解决了相关技术中移动机器人只能按照固定移动轨迹移动,灵活性较低的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!