一种基于物联网的移动机器人的控制方法
本发明涉及通信,特别涉及一种基于物联网的移动机器人的控制方法。
背景技术:
1、随着物联网的不断发展,家用电器都可以接入同一个物联网中,从而方便用户进行远程操控。
2、目前,移动机器人的品种在不断增加,包括家用的扫地机器人,还包括商用的信息引导机器人,还包括自动送餐的机器人。目前,这些移动机器人通常都是按照预先存储的程序来运行,使用者无法灵活地对移动机器人下达各项指令,也无法借助物联网的优势,便捷地对移动机器人进行控制。
技术实现思路
1、本发明提供一种基于物联网的移动机器人的控制方法,能够通过物联网便捷地对移动机器人进行控制。
2、鉴于此,本发明一方面提供一种基于物联网的移动机器人的控制方法,所述方法包括:
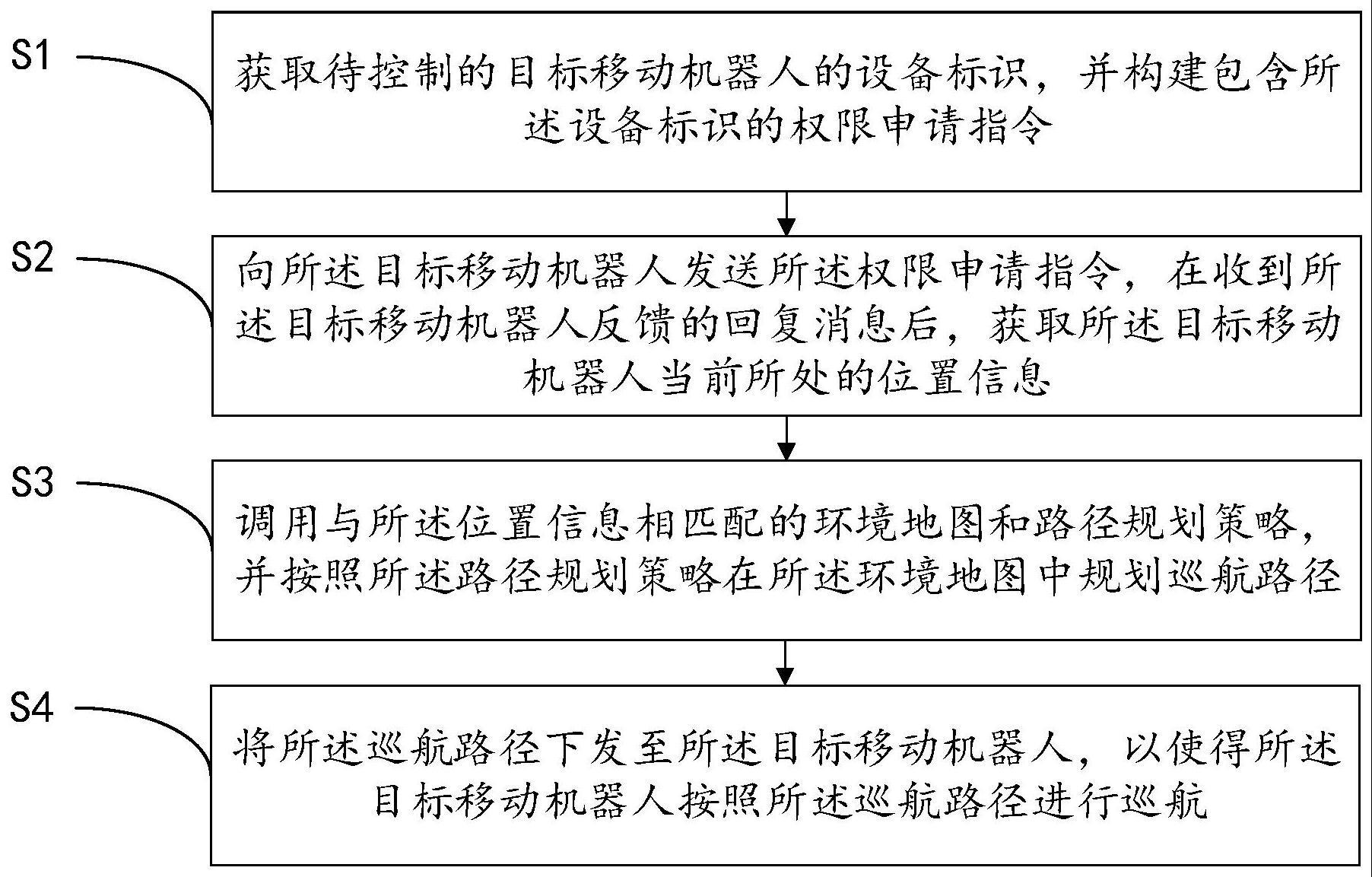
3、获取待控制的目标移动机器人的设备标识,并构建包含所述设备标识的权限申请指令;
4、向所述目标移动机器人发送所述权限申请指令,在收到所述目标移动机器人反馈的回复消息后,获取所述目标移动机器人当前所处的位置信息;
5、调用与所述位置信息相匹配的环境地图和路径规划策略,并按照所述路径规划策略在所述环境地图中规划巡航路径;
6、将所述巡航路径下发至所述目标移动机器人,以使得所述目标移动机器人按照所述巡航路径进行巡航。
7、在一个实施方式中,获取待控制的目标移动机器人的设备标识包括:
8、登录物联网账号,并在所述物联网账号表征的局域网内广播设备识别信息;
9、接收所述局域网内的各个移动机器人反馈的设备标识,并展示包含所述反馈的设备标识的标识列表;
10、响应于标识选取指令,在所述标识列表中确定所述标识选取指令对应的目标移动机器人的设备标识。
11、在一个实施方式中,所述设备识别信息中包括类型字段和数据体字段,其中,所述类型字段填充用于表征广播信息的类型标识,所述数据体字段用于填充所述广播信息的实际内容。
12、在一个实施方式中,构建包含所述设备标识的权限申请指令包括:
13、在预设的指定类型的通信报文中,扩展自定义字段,并在所述自定义字段中填充用户标识,并将填充了用户标识后的所述通信报文作为包含所述设备标识的权限申请指令。
14、在一个实施方式中,按照所述路径规划策略在所述环境地图中规划巡航路径包括:
15、查询所述环境地图中是否具备已规划的巡航路径,若具备已规划的巡航路径,在所述已规划的巡航路径中查询与所述路径规划策略相匹配的目标巡航路径。
16、在一个实施方式中,所述方法还包括:
17、若不具备已规划的巡航路径,识别所述路径规划策略表征的巡航类型,并在所述环境地图中确定所述巡航类型覆盖的巡航区域;
18、在所述巡航区域中规划所述目标移动机器人的巡航路径。
19、在一个实施方式中,在收到所述目标移动机器人反馈的回复消息后,所述方法还包括:
20、按照指定的时间间隔向所述目标移动机器人发送心跳检测数据包,以与所述目标移动机器人保持通信连接,其具体步骤包括,
21、步骤a1:利用公式(1)根据向所述目标移动机器人发送所述权限申请指令到接收到所述目标移动机器人反馈的回复消息的时间间隔控制所述指定的时间间隔
22、
23、其中t表示所述指定的时间间隔的控制数值;t0表示所述指定的时间间隔的最小控制数值;te表示接收到所述目标移动机器人反馈的回复消息的时刻;t0表示向所述目标移动机器人发送所述权限申请指令的时刻;表示向下取整;表示向上取整;
24、步骤a2:利用公式(2)根据向所述目标移动机器人发送所述权限申请指令到接收到所述目标移动机器人反馈的回复消息的时间间隔控制所述心跳检测数据包每次发送的重复数据包次数
25、
26、其中n表示所述心跳检测数据包每次发送的重复数据包的控制次数;
27、步骤a3:利用公式(3)根据向所述目标移动机器人发送所述权限申请指令到接收到所述目标移动机器人反馈的回复消息的时间间隔控制所述心跳检测数据包的数据长度
28、
29、其中l表示所述心跳检测数据包的数据控制长度;lmax表示所述心跳检测数据包的最大数据长度;lmin表示所述心跳检测数据包的最小数据长度;
30、控制按照指定的时间间隔为t的时间间隔向所述目标移动机器人发送数据长度为l的n个心跳检测数据包,以与所述目标移动机器人保持通信连接。
31、在一个实施方式中,将所述巡航路径下发至所述目标移动机器人包括:
32、在所述心跳检测数据包中添加所述巡航路径的信息,以通过所述心跳检测数据包将所述巡航路径的信息下发至所述目标移动机器人。
33、由上可见,本发明提供的技术方案,获取待控制的目标移动机器人的设备标识,并构建包含所述设备标识的权限申请指令;向所述目标移动机器人发送所述权限申请指令,在收到所述目标移动机器人反馈的回复消息后,获取所述目标移动机器人当前所处的位置信息;调用与所述位置信息相匹配的环境地图和路径规划策略,并按照所述路径规划策略在所述环境地图中规划巡航路径;将所述巡航路径下发至所述目标移动机器人,以使得所述目标移动机器人按照所述巡航路径进行巡航。通过将物联网与移动机器人进行结合,可以便捷地对移动机器人进行远程控制。
34、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
35、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种基于物联网的移动机器人的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,获取待控制的目标移动机器人的设备标识包括:
3.根据权利要求2所述的方法,其特征在于,所述设备识别信息中包括类型字段和数据体字段,其中,所述类型字段填充用于表征广播信息的类型标识,所述数据体字段用于填充所述广播信息的实际内容。
4.根据权利要求1所述的方法,其特征在于,构建包含所述设备标识的权限申请指令包括:
5.根据权利要求1所述的方法,其特征在于,按照所述路径规划策略在所述环境地图中规划巡航路径包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,在收到所述目标移动机器人反馈的回复消息后,所述方法还包括:
8.根据权利要求7所述的方法,其特征在于,将所述巡航路径下发至所述目标移动机器人包括:
技术总结
本发明提供了一种基于物联网的移动机器人的控制方法,所述方法包括:获取待控制的目标移动机器人的设备标识,并构建包含所述设备标识的权限申请指令;向所述目标移动机器人发送所述权限申请指令,在收到所述目标移动机器人反馈的回复消息后,获取所述目标移动机器人当前所处的位置信息;调用与所述位置信息相匹配的环境地图和路径规划策略,并按照所述路径规划策略在所述环境地图中规划巡航路径;将所述巡航路径下发至所述目标移动机器人,以使得所述目标移动机器人按照所述巡航路径进行巡航。通过将物联网与移动机器人进行结合,可以便捷地对移动机器人进行远程控制。
技术研发人员:王佩,张晓伟,王桥,谢煦,冉江婧,崔忠伟,郭龙
受保护的技术使用者:贵州师范学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!