一种异构无人系统抗欺骗攻击的编队跟踪控制方法
本发明属于异构无人系统时变输出编队控制领域,尤其涉及一种异构无人系统抗欺骗攻击的编队跟踪控制方法。
背景技术:
1、异构无人系统是由多个功能、结构不同的自主决策智能体组成的系统,它们可以相互通信、协同工作以完成特定任务。在异构无人系统中,不同类型的智能体可以协同完成复杂的任务,并在任务中发挥各自的优势。在很多实际场景中异构无人系统的时变输出编队发挥显著作用,通过高效的动态协同控制,在不同任务需求和环境条件下提高系统整体协作效率和性能表现是至关重要的。
2、为了解决异构无人系统的时变输出编队问题,有许多方法用来实现异构无人系统编队,如自适应控制、h∞控制、mpc控制、有限时间控制、滑模控制和鲁棒控制等,需要注意的是,上述控制方法都是连续控制方法。由于异构无人系统的大规模分布式通信,网络的通信资源十分有限,并且其中智能体间连续通信往往难以实现,显然,上述连续控制方法在某些情况下不可避免地增加了网络通信负担。相比之下,对于异步脉冲控制协议,每个智能体仅在采样瞬间独立地接收邻居状态信息,从而减少网络通信负担。因此,采用异步脉冲控制协议将大大减少信息传输,有助于减少网络通信负担和降低通信丢失的风险。
3、在高度互联的无人系统中,完成期望的时变编队高度依赖于智能体之间的信息交互。然而,由于通信网络的开放性,异构无人系统间信息交换的通信信道容易受到恶意攻击,欺骗攻击作为最常见的网络攻击之一,通过注入虚假数据到相应的信道中,导致传输信号与真实的信号发生变化,进而异构无人系统的时变编队任务无法完成。为了保持跟踪误差系统的稳定性设计能够抵御攻击的控制算法具有十分重要的实际意义。尽管异构无人系统的编队问题已经取得了一定的基础性研究成果,但是其在资源匮乏、不可靠网络通信环境下的编队控制仍然是一个开放性的问题。
技术实现思路
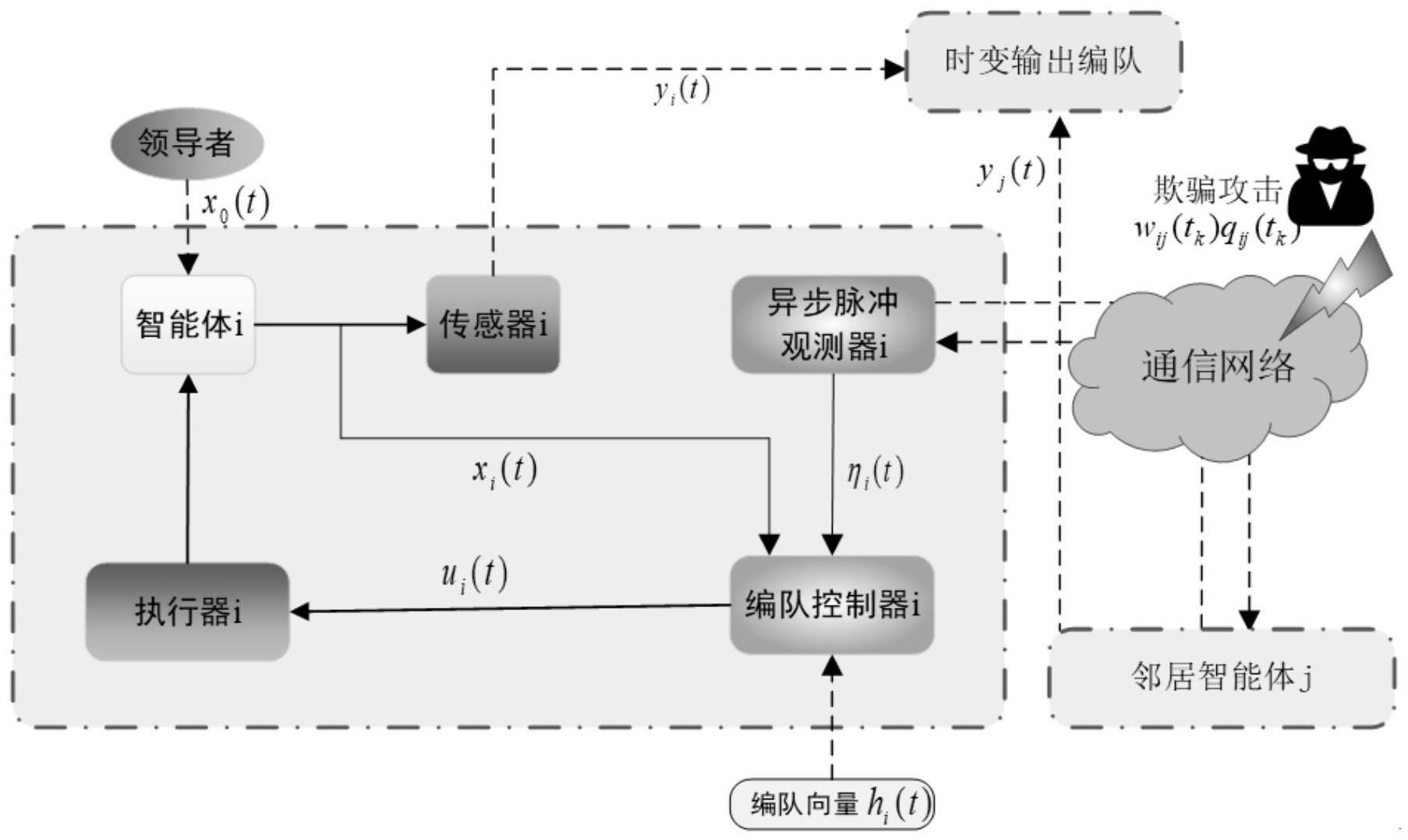
1、发明目的:本发明的目的在于提供一种异构无人系统抗欺骗攻击的编队跟踪控制方法。能够使异构无人系统在一定误差界的范围内达成期望的时变编队构型,并且可以节省通信资源,同时有效地抵御欺骗攻击所带来的影响。
2、技术方案:本发明的一种异构无人系统抗欺骗攻击的编队跟踪控制方法,包括以下步骤:
3、步骤1:根据通信节点建立通信拓扑结构,构建异构无人系统的动态模型,异构无人系统包括若干智能体;
4、步骤2:基于异构无人系统的动态模型,设计智能体的期望编队构型;
5、步骤3:对独立发生在各智能体之间通信信道上的欺骗攻击进行建模,设计分布式异步脉冲弹性观测器,建立动态观测误差模型;
6、步骤4:基于智能体的状态信息,分布式异步脉冲弹性观测器的观测值和期望编队构型,设计基于异步脉冲控制的分布式时变编队跟踪控制协议,并建立动态跟踪误差系统模型;
7、其中,该分布式异步脉冲弹性观测器有以下三个优点:1、实时估计领导者信息;2、补偿欺骗攻击造成的不良影响;3、有效地提高通信资源利用率。
8、步骤5:在存在欺骗攻击时,对异构无人系统编队系统进行分析,给出误差系统指数均方稳定的条件;
9、步骤6:分析异构无人系统在欺骗攻击下编队跟踪性能,编队跟踪误差收敛于一定误差界内,异构无人系统实现期望的时变输出编队并解决由欺骗攻击引起的信息虚假问题。
10、进一步的,步骤1中,所述通信节点建立通信拓扑结构具体为:
11、g=(v,ξ,a)
12、其中v={v1,v2,...vn}是节点的集合,在无向图中(i,j)∈ξ表示的是智能体j从智能体i接收信息;因此,在无向图中(i,j)∈ξ等价于(j,i)∈ξ;a=[aij]∈rn×n是邻接矩阵,如果满足(i,j)∈ξ,那么aij=1,否则aij=0;使用拉普拉斯矩阵l=[lij]∈rn×n来描述无向图g,定义为当i≠j时lij=-aij,否则lii=∑j≠iai;耦合权重b=diag{b1,b2,...,bn},其中bi=1表示智能体i能接收领导者状态信息,否则bi=0。
13、进一步的,步骤1中,所述构建异构无人系统的动态模型包括领导者0和第i的跟随者的系统动态模型,其分别为:
14、
15、其中x0(t)和y0(t)分别是领导者的状态和输出,xi(t),yi(t)和ui(t)分别表示第i个跟随者的状态,输出和控制输入,a0,c0,ai,bi和ci是具有适当维数的常数系统矩阵。
16、进一步的,步骤2中,所述设计智能体的期望编队构型,具体包括:
17、定义多智能体输出编队形状信息为h(t)=[h1t(t),h2t(t),...hnt(t)]t,满足:
18、
19、其中hi(t)∈rn是分段连续可微的,ahi和chi是合适维数的系统矩阵,yhi是多智能体输出编队状态信息;
20、当选择合适的ahi时,(xhi,uhi)满足下面以下线性矩阵方程:
21、
22、进一步的,步骤3中,对独立发生在智能体之间通信信道上的欺骗攻击进行建模,具体为:欺骗攻击模型描述为wij(tk)qij(tk),首先引入一个服从伯努利分布的二元变量wij(tk),其概率密度函数为
23、
24、其中,μij∈[0,1]用来描述在tk时刻智能体i到智能体j的通信信道中发生欺骗攻击的概率,wij(tk)=1表示发生欺骗攻击,否则wij(tk)=0;令w(tk)=[wij(tk)]n×n,e{x}表示x的期望值,那么
25、
26、其中qij(tk)表示在tk时刻智能体i到智能体j的通信信道中的攻击信号,假设欺骗攻击的总能量是有限的,定义矩阵q(tk)=[qij(tk)]n×n,且满足||q(tk)||2≤q;
27、其中,q表示攻击信号总能量。
28、进一步的,步骤3中,所述设计分布式异步脉冲弹性观测器具体为:
29、
30、每个智能体仅在脉冲采样瞬间独立地发送自身状态信息和接收邻居状态信息,即智能体i只在脉冲时刻相互通信;πi(t)∈rn是智能体i异步脉冲观测器的观测值,δ(.)是狄拉克函数,k>0是观测器的耦合增益;在异构无人系统中,为每一个跟随者智能体设计一个分布式异步脉冲弹性观测器,使得跟随者可以实时估计领导者状态信息、补偿欺骗攻击造成的不良影响并有效地提高无人系统通信资源的利用率,然后将补偿值反馈到控制器中,在保证跟踪误差动态系统一致有界、满足期望的编队性能的情况下,有效地提高通信网络的可靠性。
31、将所有脉冲时间序列按时间顺序合并成时间序列tk,即
32、
33、进一步的,步骤3中,所述建立动态观测误差模型,具体为:
34、定义观测误差为:那么,误差动态系统如下:
35、
36、其中χ(tk)=diag{χ1(tk),χ2(tk),...,χn(tk)},χi(tk)=1表示在脉冲时刻第i个智能体发生脉冲,否则χi(tk)=0;令
37、那么,误差动态系统写成:
38、
39、进一步的,步骤4中,基于跟随者状态信息,分布式异步脉冲弹性观测器的观测值和期望编队构型,设计基于异步脉冲控制的分布式时变编队跟踪控制协议,具体为:
40、ui=k1ixi+k2iπi+k3ihi
41、其中k1i,k2i,k3i是适当维数的矩阵,根据下列线性矩阵方程:
42、
43、得到(xi,ui)和(xhi,uhi)的解,再选择合适的k1i,由下列等式可得到k2i,k3i
44、k2i=ui-k1ixi
45、k3i=uhi-k1ixhi
46、所述建立动态跟踪误差系统模型具体为:定义ei=yi(t)-yhi(t)-y0(t)为系统跟踪误差,使得在欺骗攻击下仍然实现满足的编队跟踪控制,异构无人系统编队控制的目标公式化为:
47、e(||ei||2)<β
48、其中β为一个正常数,e(||.||2)代表欧几里得向量范数或其衍生得矩阵2-范数的期望。
49、进一步的,步骤5具体为:基于lyapunov理论,在欺骗攻击下分析异构无人系统误差系统指数均方稳定的充分条件:
50、存在正标量α1,α2,a,b,c,d,正定矩阵s和正定矩阵p=diag(p1,...,pn),需要满足以下矩阵不等式:
51、
52、a0ts+sa0+α2s<0
53、γ>κi
54、
55、其中
56、a=diag(a1,...,an),b=diag(b1,...,bn),k1=diag(k11,...,k1n),x=diag(x1,...,xn)
57、
58、tmax=max{tk+1-tk},tmin=min{tk+1-tk},k=1,2...
59、
60、
61、进一步的,步骤6具体为:异构无人系统的编队跟踪误差的期望轨迹收敛于集合d:
62、
63、有益效果:与现有技术相比,本发明具有如下显著优点:
64、(1)在欺骗攻击下,本发明通过构造异步脉冲观测器,可以有效地补偿欺骗攻击造成的缺陷,并且使智能体在采样瞬间独立地接收邻居状态信息并对系统不可测信息进行观测,同时观测器将观测值反馈到编队控制器中。基于该观测器,本发明提供了一种异构无人系统抗欺骗攻击的编队跟踪控制方法。本发明公开的方法能够使异构无人系统在一定误差界的范围内达成期望的时变编队构型,并且可以节省通信资源,同时有效地抵御欺骗攻击所带来的影响,具有实际的应用价值。
65、(2)在异构无人系统中,为每一个跟随者智能体设计一个分布式异步脉冲弹性观测器,使得跟随者可以实时估计领导者状态信息、补偿欺骗攻击造成的不良影响并有效地提高无人系统通信资源的利用率,然后将补偿值反馈到控制器中,在保证跟踪误差动态系统一致有界、满足期望的编队性能的情况下,有效地提高通信网络的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!