一种固定推力大小的航天器追逃防博弈控制方法
本发明属于航天,涉及一种固定推力大小的航天器追逃防博弈控制方法。
背景技术:
1、在轨航天器容易受到非合作目标的攻击与抵近,由于其价值高燃料需要用于在轨工作,因此在受到威胁时不能自主躲避,需要释放伴随卫星作为防御星进行追逃防博弈。防御星与追击星之间对于主星的位置争夺就称为航天器追逃防博弈问题,追击星的目的是靠近主星,同时又要保证自身不被防御星拦截破坏;防御星的目的是尽可能避免追击星靠近主星。
2、目前对航天器追逃防博弈问题的建模大部分都基于无控制上限约束的动力学模型,导致求解之后的控制律往往很大,超出真实航天器能够执行的水平。而引入控制上限约束会导致模型复杂,不易求解。
技术实现思路
1、本发明的目的在于解决现有技术中的问题,提供一种固定推力大小的航天器追逃防博弈控制方法,将固定推力大小的航天器追逃防博弈问题转化为零和微分对策求解问题,并转化为两点边值问题,为采用主从星协同的航天器提供有效的威胁解决方案。
2、为达到上述目的,本发明采用以下技术方案予以实现:
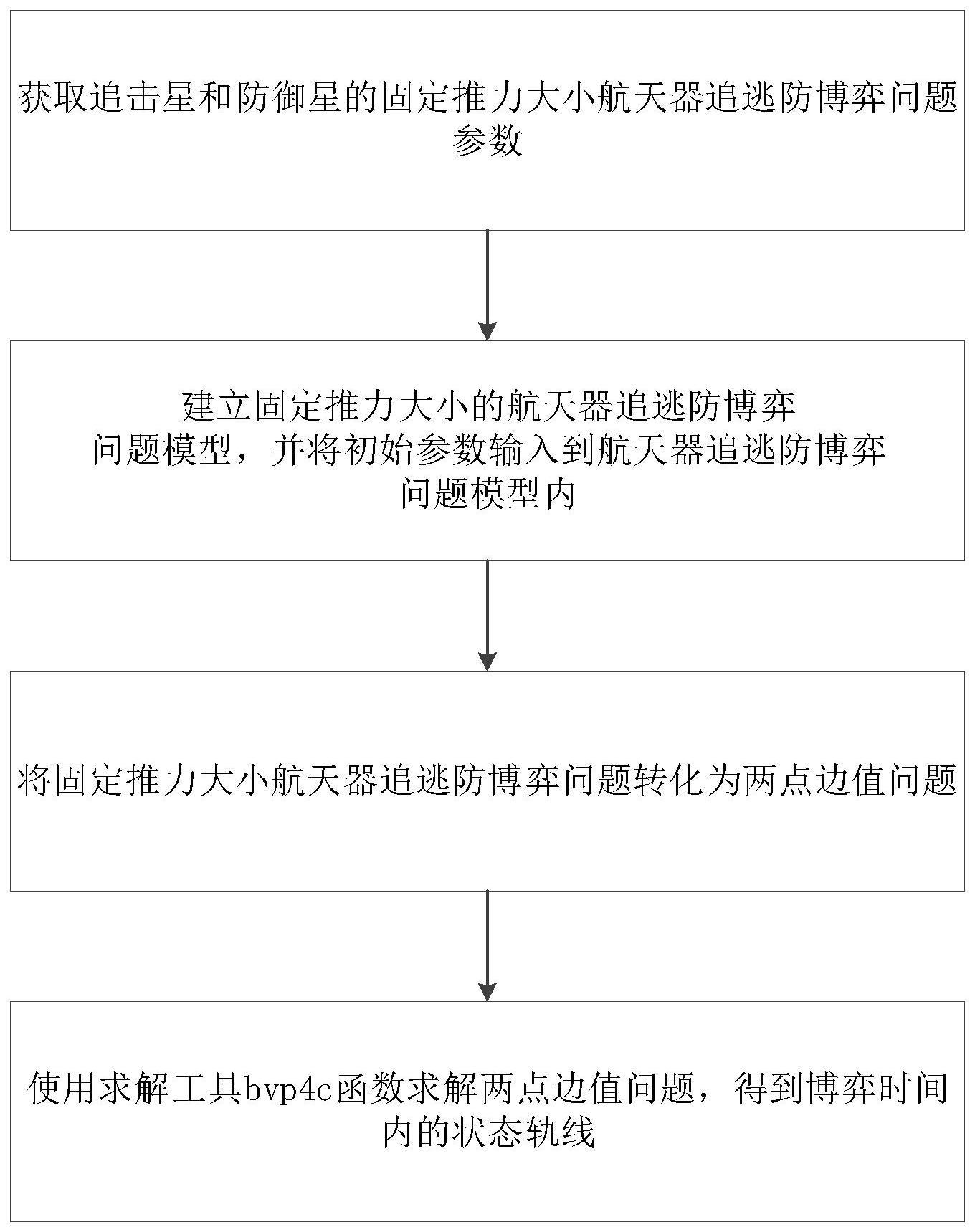
3、一种固定推力大小的航天器追逃防博弈控制方法,包括以下步骤:
4、获取追击星和防御星的航天器追逃防博弈参数;
5、根据追击星和防御星的航天器追逃防博弈参数,建立固定推力大小的航天器追逃防博弈问题模型,使用拉格朗日乘子法和变分法进行求解,得到追击星和防御星的最优控制律;
6、将追击星和防御星的最优控制律输入到固定推力大小的航天器追逃防博弈问题模型中,将固定推力大小的航天器追逃防博弈问题转化为两点边值问题;
7、对两点边值问题进行求解,完成固定推力大小的航天器追逃防博弈问题模型求解。
8、进一步的,所述追击星和防御星的航天器追逃防博弈参数包括追击星的初始位置、防御星的初始位置、追击星的速度和防御星的速度。
9、进一步的,所述固定推力大小的航天器追逃防博弈问题模型的建立过程如下:
10、以主星的位置为原点建立lvlh坐标系,基于lvlh坐标系结合追击星和防御星的博弈目的设计以下代价函数;
11、
12、其中,j表示追击星和防御星双方的代价函数,所述代价函数表示终端时刻追击星和主星之间的相对状态与防御星和主星之间的相对状态;a表示追击星的下标,d表示防御星的下标,xa表示追击星的状态矢量,xa=[xa,ya,vax,vay]t,xd表示防御星的状态矢量,xd=[xd,yd,vdx,vdy]t,x表示lvlh系下轨道径向的位置分量,y表示lvlh系下飞行方向的位置分量,vx表示lvlh系下轨道径向的速度分量,vy表示lvlh系下轨道飞行方向的速度分量,tf表示博弈终端时刻,对称半正定矩阵q1∈r4×4、q2∈r4×4满足:
13、q1=k1i4×4,q2=k2i4×4
14、其中,k1,k2表示权重系数;
15、基于cw方程,确定在空间轨道上追击星和防御星所需要满足的动力学约束的微分方程;
16、
17、ta=[macosαa,masinαa]t
18、td=[mdcosαd,mdsinαd]t
19、ua=αa,ud=αd
20、其中,矩阵a表示航天器相对运动动力学约束矩阵,ua表示追击星施加的控制量,表现为对推力角度的连续控制,ud表示防御星施加的控制量,表现为对推力角度的连续控制;矩阵b表示追击星和防御星的控制矩阵,b=[o2×2,i2×2]t,ma表示追击星推力加速度大小,为恒定值,md表示防御星推力加速度大小,为恒定值;
21、根据上述过程完成基于微分对策建立的固定推力大小的航天器追逃防博弈模型的建立。
22、进一步的,所述矩阵a通过cw方程构建,构建过程为:
23、
24、其中,n表示主星的地球公转轨道角速度,μ表示地球引力场系数,μ=3.986×1014,a0表示主星的轨道半长轴。
25、进一步的,所述追击星和防御星的最优控制律的求解过程为:
26、定义防御星和追击星之间的相对状态量差为:y=xd-xa,约束微分方程改为:
27、
28、基于拉格朗日乘子法引入协态变量,将有微分方程等式约束的双边优化问题转化为无约束双边优化问题,对代价函数进行处理得到辅助代价函数;
29、
30、其中,λ和ν表示协态变量。
31、为了方便对辅助代价函数进行求变分,将辅助代价函数进行分部积分处理:
32、
33、其中,
34、
35、h(xa,y,ua,ud,t)=λt(axa+bta)+νt(ay+btd-bta)
36、对辅助代价函数求变分:
37、
38、由于变分法求解该问题解的必要条件为辅助代价函数的变分为0,因此可以得到下列必要条件:
39、
40、
41、
42、
43、
44、其中,根据后两式得到追击星和防御星的最优控制律为:
45、
46、进一步的,所述将固定推力大小的航天器追逃防博弈问题转化为两点边值问题的步骤如下:
47、将追击星和防御星的最优控制律分别代入追击星和防御星的动力学约束微分方程:
48、
49、得到下列两点边值问题:
50、
51、进一步的,所述两点边值问题进行求解过程为:采用matlab中的两点边值问题求解工具bvp4c函数对两点边值问题进行求解,得到追击星和防御星的状态轨迹,最终完成固定推力大小的航天器追逃防博弈问题模型的求解。
52、与现有技术相比,本发明具有以下有益效果:
53、本发明提供一种固定推力大小的航天器追逃防博弈控制方法及系统,引入了追逃防博弈参与者有控制上限的约束,将控制量转化为对发动机推力角度的控制,并将追击星和防御星的博弈目的通过一对数值相反的代价函数描述,是基于线性的cw方程的一种微分对策博弈模型,具有模型简单,线性化误差很小的优点。引入了基于推力角度控制的控制模式,可以人为设计推力的大小,使模型更贴合实际。本发明将航天器追逃防博弈问题转化为了零和微分对策求解问题,并进一步转化为两点边值问题,并在仿真中取得了良好的效果,显著提升了问题的求解效率,且该模型和方法可为采用主从星协同的航天器提供有效的威胁解决方案。
技术特征:
1.一种固定推力大小的航天器追逃防博弈控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种固定推力大小的航天器追逃防博弈控制方法,其特征在于,所述追击星和防御星的航天器追逃防博弈参数包括追击星的初始位置、防御星的初始位置、追击星的速度和防御星的速度。
3.根据权利要求1所述的一种固定推力大小的航天器追逃防博弈控制方法,其特征在于,所述固定推力大小的航天器追逃防博弈问题模型的建立过程如下:
4.根据权利要求3所述的一种固定推力大小的航天器追逃防博弈控制方法,其特征在于,所述矩阵a通过cw方程构建,构建过程为:
5.根据权利要求1所述的一种固定推力大小的航天器追逃防博弈控制方法,其特征在于,所述追击星和防御星的最优控制律的求解过程为:
6.根据权利要求1所述的一种固定推力大小的航天器追逃防博弈控制方法,其特征在于,所述将固定推力大小的航天器追逃防博弈问题转化为两点边值问题的步骤如下:
7.根据权利要求1所述的一种固定推力大小的航天器追逃防博弈控制方法,其特征在于,所述两点边值问题进行求解过程为:采用matlab中的两点边值问题求解工具bvp4c函数对两点边值问题进行求解,得到追击星和防御星的状态轨迹,最终完成固定推力大小的航天器追逃防博弈问题模型的求解。
技术总结
本发明公开了一种固定推力大小的航天器追逃防博弈控制方法,包括以下步骤:获取追击星和防御星的航天器追逃防博弈参数;根据追击星和防御星的航天器追逃防博弈参数,建立固定推力大小的航天器追逃防博弈问题模型,使用拉格朗日乘子法和变分法进行求解,得到追击星和防御星的最优控制律;将追击星和防御星的最优控制律输入到固定推力大小的航天器追逃防博弈问题模型中,将固定推力大小的航天器追逃防博弈问题转化为两点边值问题;对两点边值问题进行求解,完成固定推力大小的航天器追逃防博弈问题模型求解。本发明显著提升了问题的求解效率,且该模型和方法可为采用主从星协同的航天器提供有效的威胁解决方案。
技术研发人员:肖余之,党朝辉,李一峰,唐生勇
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!