一种无人机编队控制方法
本发明涉及无人机控制,具体涉及一种无人机编队控制方法。
背景技术:
1、四旋翼无人机具有结构简单、飞行精准、机动性强等优点。因此,在军事打击、载物、测量、灾害监测等方面,有着很好的应用。然而随着控制任务复杂性的增加,例如无人机表演、沿海侦察、集群打击等,仅凭一台无人机难以完成,因此需要多台无人机集群协同作业。
2、目前,四旋翼无人机集群控制方法主要基于模型依赖控制,例如反步法、模糊控制等,例如中国专利公开号cn116300466a公开的一种旋翼无人机集群协同吊运点质量载荷的鲁棒控制方法。然而,这类控制方法都是基于参数已知的高阶非线性模型。考虑到无人机的实际动态模型中存在着内部结构不确定,外界扰动影响等问题,导致基于模型依赖的控制策略效果有限。
3、另一方面,在对四旋翼无人机进行建模时,通常简单地认为无人机模型是单一尺度的。然而实际上,由于小参数的存在,导致了无人机的位置、姿态角与角速度的变化往往处于不同的时间尺度,采用单一尺度的建模会导致最终控制精度下降。
技术实现思路
1、本发明所要解决的技术问题在于现有技术四旋翼无人机控制方法控制策略效果有限,控制精度不高的问题。
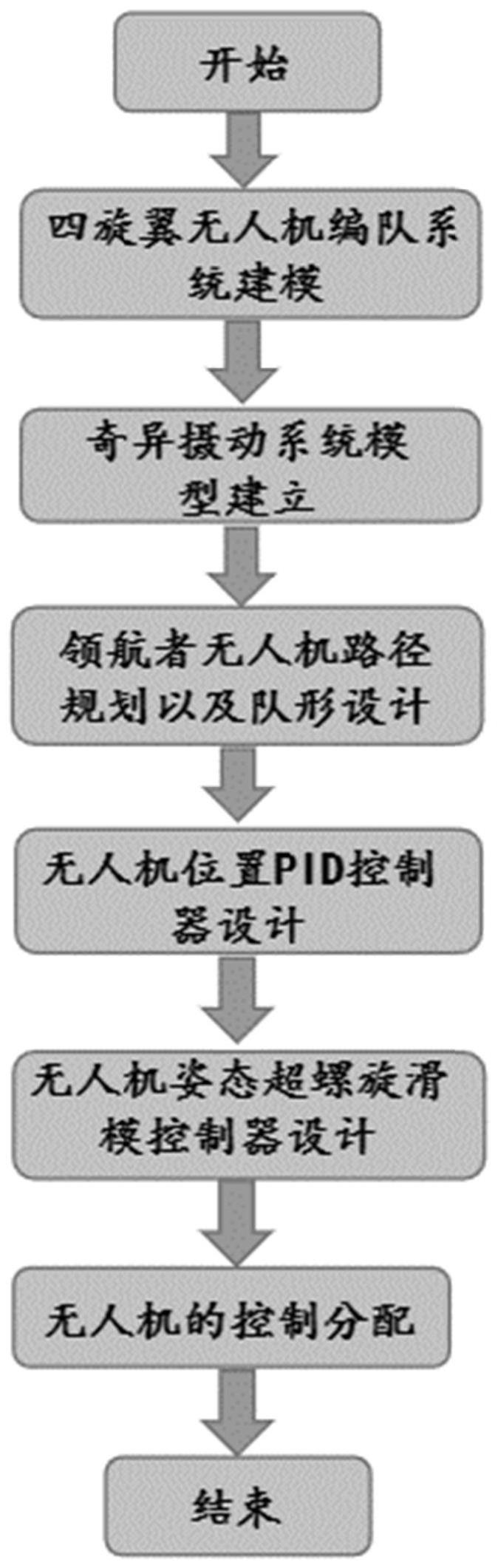
2、本发明通过以下技术手段解决上述技术问题的:一种无人机编队控制方法,包括以下步骤:
3、步骤一、建立无人机六自由度动力学模型,设定无人机期望的编队队形;
4、步骤二、根据给定的航点,由虚拟领航者规划出一条飞行路径,跟随者无人机根据有向图信息传递与虚拟领航者保持队形;
5、步骤三、在外环的位置系统设计位置环pid控制器,解算出虚拟无人机内环期望姿态角,在内环的姿态系统设计自适应超螺旋滑模控制律作为内环控制器;
6、步骤四、将位置环pid控制器以及内环控制器的控制输入转换为相应的pwm波信号加载到四旋翼无人机的电机上。
7、进一步地,所述步骤一包括:
8、s101、无人机六自由度动力学模型为:
9、
10、其中,i表示第i个无人机,i=1,…,n;mi为第i个无人机质量;g表示重力加速度;xi、yi、zi分别表示第i个无人机x、y、z轴的位置;φi、θi、ψi为第i个无人机横滚、俯仰、偏航角;iix、iiy、iiz为第i个无人机体绕机体坐标系xb、yb、zb轴的转动惯量;jir表示第i个无人机的电动机和桨叶的转动惯量;均为无人机的陀螺力矩;wir=ni1-ni2+ni3-ni4,ni1、ni2、ni3、ni4表示第i个无人机四个旋翼的转速;ui1、ui2、ui3、ui4表示四个旋翼对无人机控制量;bi1、bi2、bi3分别是第一控制系数至第三控制系数;
11、s102、基于有向图图论,描绘无人机间的通讯关系:
12、s103、设定编队队形;
13、qi表示第i个无人机相对于虚拟领航者的相对位置,且虚拟领航者无人机的位置q0=0,为了实现四个无人机的正方形队形,则设置为:
14、q1={1,0,1},q2={1,1,1},q3={0,1,1},q4={0,0,1}。
15、更进一步地,所述步骤二包括:
16、s201、确定无人机当前位置pd(tk),给定虚拟领航者无人机的期望位置终点pdl;
17、s202、根据给定的虚拟领航者期望位置终点pdf,以及虚拟领航者tk时刻的位置信息p0(tk),产生下一时刻期望点pd(tk+1),由一系列期望点,组合成一条期望路径,最终得到虚拟领航者的期望运动轨迹pd;
18、s203、通过双积分滤波器对规划的路径信号进行平滑预处理。
19、更进一步地,所述步骤三包括:
20、s301、根据无人机六自由度动力学模型,分解得无人机位置系统模型:
21、
22、其中,uix、uiy、uiz分别为无人机位置三个方向的控制量,且
23、
24、s302、设计位置环pid控制器;
25、s303、根据s302中所设计的位置环pid控制器,解算出虚拟无人机内环期望姿态角。
26、更进一步地,所述s302包括:
27、将位置误差信号和速度误差信号分别设置为:
28、
29、其中,aij表示第i个无人机和第j个无人机之前的连接权重,若aij=0,表示无人机i与无人机j是不连接的,不存在通信,若aij>0,表示无人机i与无人机j是连接的,存在通信;pi表示第i个无人机的位置信息;vi表示第i个无人机的速度信息;
30、设计的位置环pid控制器形式为:
31、
32、其中,u0=[u0x,u0y,u0z]t表示虚拟领航者无人机的控制量;ui=[uix,uiy,uiz]t表示第i个跟随者无人机的控制量;k0p、kip分别为虚拟领航者无人机、第i个跟随者无人机的比例参数;k0h、kih分别为虚拟领航者无人机、第i个跟随者无人机的积分参数;k0d、kid分别为虚拟领航者无人机、第i个跟随者无人机的微分参数;虚拟领航者无人机的位置误差e0p=p0-pd;pd表示虚拟领航者无人机的期望位置;虚拟领航者无人机的速度误差e0v=v0-vd;vd表示虚拟领航者无人机的期望速度。
33、更进一步地,所述s303包括:
34、虚拟领航者无人机的位置模型为:
35、
36、根据以下公式解算出无人机的虚拟领航者无人机的位置环pid控制器u01、第i个跟随者无人机的位置环pid控制器ui1以及相应的期望姿态角:
37、
38、
39、其中,φ0d、θ0d、ψ0d为虚拟领航者无人机的期望横滚角、俯仰角、偏航角。
40、更进一步地,所述步骤三还包括:
41、s304、基于奇异摄动方法,建立两时间尺度姿态系统模型,获取虚拟领航者无人机以及跟随者无人机的姿态角和姿态角速度的误差信号,基于此,设计虚拟领航者无人机以及跟随者无人机的参数依赖型线性滑模面;基于姿态角和姿态角速度的误差信号以及参数依赖型线性滑模面,设计基于障碍函数的自适应超螺旋滑模控制律。
42、更进一步地,所述基于奇异摄动方法,建立两时间尺度姿态系统模型,获取虚拟领航者无人机以及跟随者无人机的姿态角和姿态角速度的误差信号,包括:
43、建立两时间尺度姿态系统模型:
44、
45、得到内环姿态模型的状态方程:
46、其中,μ为预设的常数且μ=min(iix,iiy,iiz),xi2=col{φi,θi,ψi},wi2=col{bi1ui1,bi2ui2,bi3ui3},
47、虚拟领航者无人机的姿态角的误差信号e0a和姿态角速度的误差信号e0av、第i个跟随者无人机的姿态角的误差信号eia和姿态角速度的误差信号eiav表示为:
48、
49、其中,x02=col{φ0,θ0,ψ0},x02d=col{φ0d,θ0d,ψ0d},
50、更进一步地,所述基于奇异摄动方法,设计虚拟领航者无人机以及跟随者无人机的参数依赖型线性滑模面;基于姿态角和姿态角速度的误差信号以及参数依赖型线性滑模面,设计基于障碍函数的自适应超螺旋滑模控制律,包括:
51、设计虚拟领航者无人机的参数依赖型线性滑模面s0以及第i个跟随者无人机的参数依赖型线性滑模面si:
52、其中,c0a、cia为虚拟领航者无人机及第i个跟随者无人机的给定参数,设计基于障碍函数的自适应超螺旋滑模控制律:
53、
54、其中,w02表示虚拟领航者无人机的控制量,wi2表示第i个跟随者无人机的控制量,r0表示虚拟领航者无人机超螺旋滑模控制中的中间变量,ri表示第i个跟随者无人机超螺旋滑模控制中的中间变量,wj2表示第j个跟随者无人机的控制量,k01、k02、ki1、ki2、l0、li均为预设的控制增益且l0、li均为障碍函数增益。
55、更进一步地,所述步骤四包括:
56、将第i个跟随者无人机的位置环pid控制器以及内环控制器的控制输入转换为pwm波信号,加载到第i个跟随者无人机的4个旋翼的电机上,由电机驱动旋翼转动,改变无人机的位姿;加载到无人机的四个旋翼上的pwm波信号的转换矩阵如下:
57、
58、其中,α为转换系数;pwm1、pwm2、pwm3、pwm4分别表示无人机四个旋翼上的pwm波信号,[ui2,ui3,ui4]t=wi2。
59、本发明的优点在于:
60、(1)本发明设计了两种控制器,在外环也即位置环采用了比例-积分-微分(proportion integration differentiation,pid)控制器,以实现轨迹跟踪和一致性控制;内环的姿态系统采用超螺旋滑模控制器,以提高编队系统对参数不确定性和外部输入扰动的鲁棒性能,两者控制器协同控制无人机,大大提升无人机的控制效果和控制精度。
61、(2)本发明提出了一种基于障碍函数的连续的超螺旋滑模控制策略,通过障碍函数的自适应增益,将滑模变量的范数控制在一定的范围内,不仅削减了滑模控制中的“抖振”问题,还提高了控制精度,削减了控制输入。
- 还没有人留言评论。精彩留言会获得点赞!