一种飞行器姿态控制方法与流程
本发明属于非线性控制,具体涉及一种基于高阶全驱系统模型的飞行器姿态控制方法。
背景技术:
1、实际物理系统大多是由众多具有二阶模型的物理定律复合而成的,二阶和高阶系统是物理系统的自然表现形式。1724年,riccati通过变量替换将一个二阶方程降阶为一个一阶方程进行求解,使降阶法成为处理高阶方程的主要方法之一。通过后续的推导与证明,任何一个高阶系统都可以化成一个增广的一阶系统,这种降阶的思想也被人们所接受,并广泛地引入到控制系统的分析与设计中来。
2、1959年,kalman在其发表的论文《控制系统的一般理论》中,首次提出了状态空间方法,为现代控制理论的发展奠定了基础。状态空间法中的一阶系统模型注重的是状态的整体性,没有把系统的控制变量作为重点,使得基于一阶系统的控制分析与设计存在一些问题。比如,针对飞行器的通道耦合问题,传统的一阶系统方法大多是将飞行器的滚转、偏航和俯仰三个通道分开进行独立控制,控制模型不够精准,依靠增大稳定裕度来实现稳定的控制效果。
3、高阶全驱系统和系统的状态空间模型一样,是控制系统的一种描述形式,是面向控制设计的系统模型。段广仁院士揭示了高阶全驱系统在控制器设计方面的突出优势,同时又充分说明了高阶全驱系统的普遍存在性。基于高阶全驱系统理论的控制方法作为一种非线性控制方法在飞行器的控制中具有强大的潜力。
技术实现思路
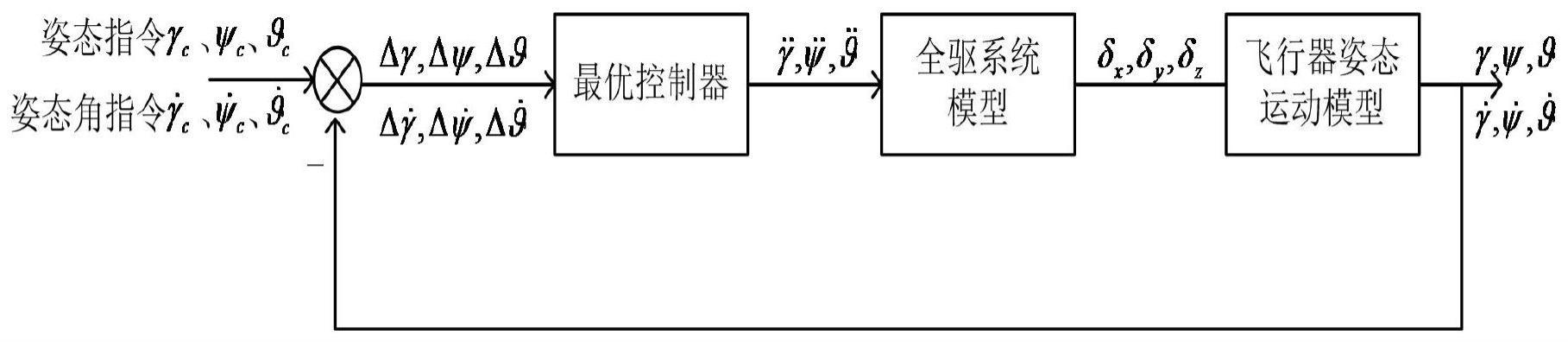
1、本发明针对存在气动耦合和操纵耦合的飞行器运动,提供了一种飞行器姿态控制方法,通过设计飞行器高阶全驱系统模型,实现滚转、偏航和俯仰三通道联合最优控制方法。
2、本发明解决上述技术问题采用的技术方案如下:
3、本发明提供了一种飞行器姿态控制方法,包括如下步骤:
4、构建飞行器运动模型,包括飞行器运动学方程、动力学方程;
5、设计包含航向舵产生的滚转力矩、滚动舵产生的航向力矩的耦合控制力矩,基于耦合控制力矩计算控制舵偏角,结合运动学方程、动力学方程,获得以舵偏角、姿态角为变量的全驱系统模型;
6、根据全驱系统模型,构建以姿态角加速度、舵偏角为变量的第一姿态控制器;
7、以控制误差最小为目标,采用线性二次型的最优控制,求解姿态角加速度,获得第二姿态控制器;
8、以第一、第二姿态控制器为最优姿态控制器,对飞行器进行姿态控制。
9、进一步地,所述运动学方程、动力学方程为飞行器转动的运动学方程、动力学方程。
10、进一步地,所述飞行器转动的运动学方程为
11、
12、其中,γ为滚转角,ψ为偏航角,为俯仰角,ωx、ωy、ωz为滚转、偏航和俯仰三个通道的转动角速度;
13、所述飞行器转动的动力学方程为
14、
15、其中,jx、jy、jz为转动惯量,mx、my、mz为控制力矩。
16、进一步地,所述耦合控制力矩计算方法如下
17、
18、其中,q为动压,s为参考面积,l为参考长度,α为攻角,β为侧滑角,δx、δy、δz分别为滚动舵偏角、航向舵偏角、俯仰舵偏角,为气动力矩系数,为航向舵产生的滚转力矩系数、为滚动舵产生的航向力矩系数。
19、进一步地,所述全驱系统模型为
20、
21、其中,表示姿态角加速度,表示姿态角速度,m(q)、为系数矩阵,为附加项矩阵。
22、进一步地,所述第一姿态控制器为
23、
24、其中,
25、进一步地,所述第二姿态控制器为
26、
27、
28、其中,ka、kb分别为滚动通道的系数矩阵、航向通道和俯仰通道的系数矩阵,δγ、δψ、分别为滚转角、偏航角、俯仰角与指令信号的误差,分别为滚转角速率、偏航角速率、俯仰角速率与指令信号的误差。
29、进一步地,所述的飞行器姿态控制方法还包括如下步骤:
30、构建无推力作用下的飞行器质心动力学方程,结合构建的运动学方程、动力学方程,将最优姿态控制器输出的滚动舵偏、航向舵偏和俯仰舵偏计算出飞行器姿态角。
31、本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序实现上述飞行器姿态控制方法。
32、本发明还提供了一种飞行器,采用前述的飞行器姿态控制方法进行姿态控制。
33、本发明与现有技术相比的有益效果:
34、本发明针对一类存在气动耦合和操纵耦合的飞行器,将飞行器设计为高阶全驱系统模型,设计了基于高阶全驱系统模型的滚转、偏航和俯仰三通道联合最优控制方法。相比于传统的控制方法,该方法可以很好地克服飞行器耦合问题,实现飞行器姿态指令的稳定跟踪,并且具有更好的快速性。
35、作为一种非线性控制方法,基于高阶全驱系统模型的控制方法能够实现对飞行器更加精准的控制效果,对于飞行器模型的耦合性和非线性问题提供了一种更加有效的解决思路,该方法展现出了在实际工程应用中的巨大潜力
技术特征:
1.一种飞行器姿态控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的飞行器姿态控制方法,其特征在于,所述运动学方程、动力学方程为飞行器转动的运动学方程、动力学方程。
3.根据权利要求2所述的飞行器姿态控制方法,其特征在于,所述飞行器转动的运动学方程为
4.根据权利要求3所述的飞行器姿态控制方法,其特征在于,所述耦合控制力矩计算方法如下
5.根据权利要求4所述的飞行器姿态控制方法,其特征在于,所述全驱系统模型为
6.根据权利要求5所述的飞行器姿态控制方法,其特征在于,所述第一姿态控制器为
7.根据权利要求6所述的飞行器姿态控制方法,其特征在于,所述第二姿态控制器为
8.根据权利要求1所述的飞行器姿态控制方法,其特征在于,还包括如下步骤:
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序实现权利要求1~8任一项所述的飞行器姿态控制方法。
10.一种飞行器,其特征在于,采用权利要求1~8中任一项所述的飞行器姿态控制方法进行姿态控制。
技术总结
本发明提供了一种飞行器姿态控制方法,包括构建飞行器运动模型,包括飞行器运动学方程、动力学方程;设计包含航向舵产生的滚转力矩、滚动舵产生的航向力矩的耦合控制力矩,基于耦合控制力矩计算控制舵偏角,结合运动学方程、动力学方程,获得以舵偏角、姿态角为变量的全驱系统模型;根据全驱系统模型,构建以姿态角加速度、舵偏角为变量的第一姿态控制器;以控制误差最小为目标,采用线性二次型的最优控制,求解姿态角加速度,获得第二姿态控制器;以第一、第二姿态控制器为最优姿态控制器,对飞行器进行姿态控制。该方法采用高阶全驱系统模型,当被控对象存在非线性特性和操纵耦合时,对滚转、偏航和俯仰三通道进行联合最优姿态控制。
技术研发人员:刘鑫宇,郝明瑞,范宇,甄岩,岳克圆
受保护的技术使用者:北京机电工程研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!