一种运动台的控制方法、装置、电子设备及存储介质与流程
本申请涉及控制,具体而言,涉及一种运动台的控制方法、装置、电子设备及存储介质。
背景技术:
1、运动台广泛应用与光刻机等半导体生产设备。精密运动台在运行时,会发生飞车、碰撞等风险,严重时会造成经济损失和人员伤亡,因此必须制定合理的错误处理逻辑来保障工件台/掩模台的运行工况。
技术实现思路
1、有鉴于此,本申请的目的在于提供一种运动台的控制方法、装置、电子设备及存储介质,以避免运动台运动发生异常,保证其工况质量。
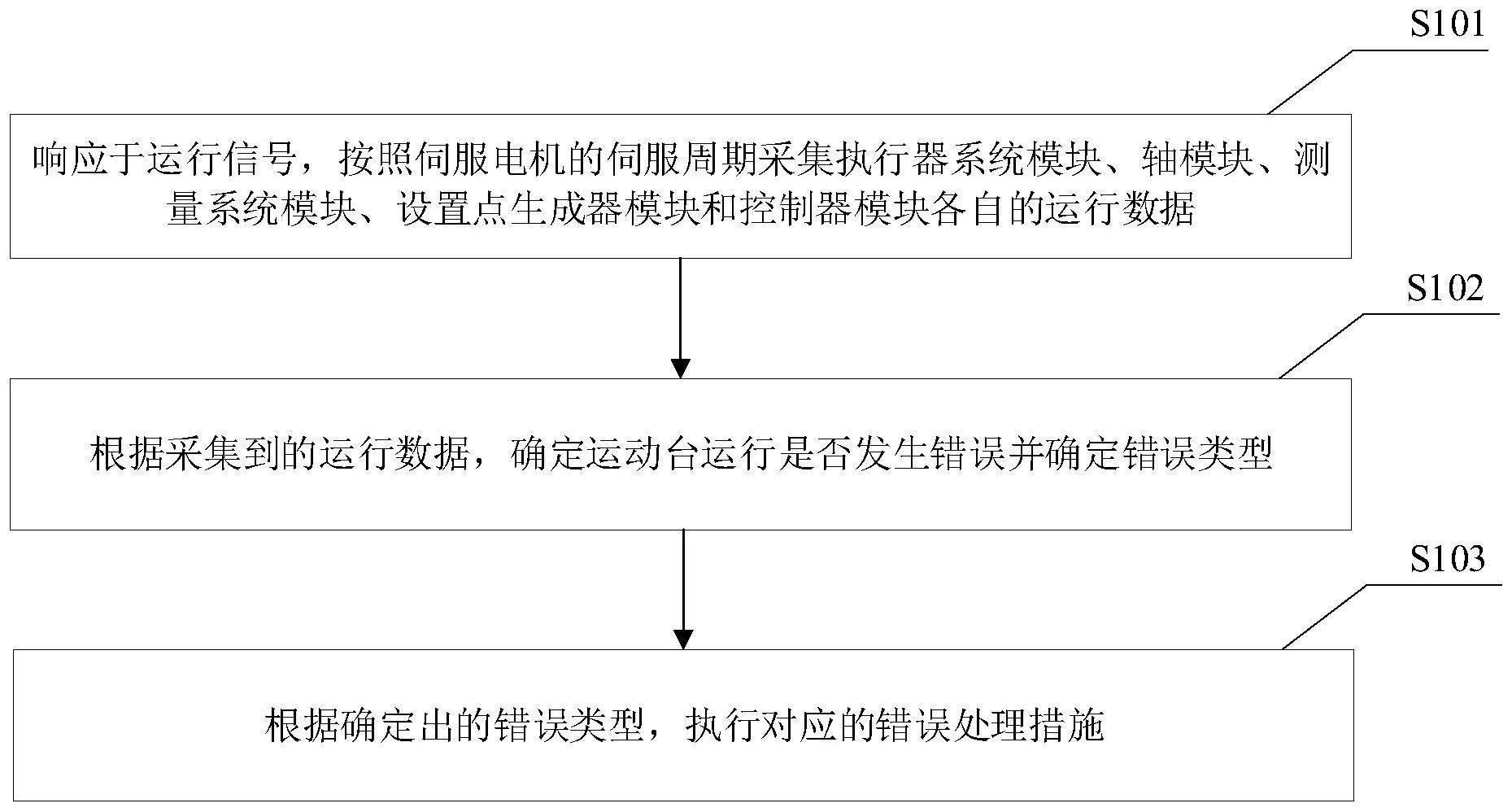
2、第一方面,本申请提供了一种运动台的控制方法,运动台设置有运动控制主系统,运动控制主系统包括执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块,执行器系统模块中至少包括用于驱动执行机构的伺服电机,方法包括:响应于运行信号,按照伺服电机的伺服周期采集执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块各自的运行数据;根据采集到的运行数据,确定运动台运行是否发生错误并确定错误类型;根据确定出的错误类型,执行对应的错误处理措施。
3、优选的,还包括针对每一确定出的错误,基于该错误对应的运行数据、错误类型以及发生时间,生成错误日志并发送至上位机。
4、优选的,根据采集到的运行数据,确定运动台运行是否发生错误并确定错误类型的步骤具体包括:当根据采集到的运行数据,确定运动控制主系统中的硬件失效时,则确定错误类型为驱动错误;当根据采集到的运行数据,确定执行机构的控制反馈通道失效时,则确定错误类型为闭环反馈错误;当根据采集到的运行数据,确定执行器系统不同轴或执行机构运动到限位位置时,则确定错误类型为行程错误。
5、优选的,当错误类型为驱动错误时,通过以下方式执行错误处理措施:控制子系统错误线上拉,设置伺服电机为禁止状态,设置执行器系统为终止状态,并控制子系统错误线置位。
6、优选的,当错误类型为闭环反馈错误时,通过以下方式执行错误处理措施:控制急停错误线上拉,通过设置点生成器模块生成急停轨迹,将急停轨迹直接发送至执行器系统模块,以控制执行机构工作,开启定时器,并控制急停错误线置位。
7、优选的,当错误类型为行程错误时,通过以下方式执行错误处理措施:控制急停错误线上拉,设置执行器系统为错误状态,通过设置点生成器模块生成急停轨迹,将急停轨迹发送至控制器模块,控制器模块将急停轨迹发送至执行器系统模块,以控制执行机构工作,开启定时器,并控制急停错误线置位。
8、优选的,通过以下方式确定错误类型:基于采集到的执行器系统中第一目标器件的采集参数值与预设参数值的大小关系,确定硬件失效,第一目标器件为控制器板卡、伺服电机和功率放大器、限位开关中的至少一个;确定采集到的执行器系统中第二目标器件的采集误差值是否在预设的范围内,若否,则确定控制反馈通道失效,第二目标器件为伺服电机执行机构中的一个,采集误差值包括稳态误差值、速度误差值和位置误差值中的一个;根据采集到的多个轴各自对应的物理输出值或逻辑位置值,确定执行器系统是否同轴或执行机构是否运动到限位位置。
9、第二方面,本申请提供了一种运动台设置有运动控制主系统,运动控制主系统包括执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块,执行器系统模块中至少包括用于驱动执行机构的伺服电机,装置包括:
10、响应单元,用于响应于运行信号,按照运伺服电机的伺服周期采集执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块各自的运行数据;
11、分类单元,用于根据采集到的运行数据,确定运动台运行是否发生错误并确定错误类型;
12、处理单元,用于根据确定出的错误类型,执行对应的错误处理措施。
13、第三方面,本申请还提供一种电子设备,包括:处理器、存储器和总线,存储器存储有处理器可执行的机器可读指令,当电子设备运行时,处理器与存储器之间通过总线通信,机器可读指令被处理器执行时执行如上述的一种运动台的控制方法的步骤。
14、第四方面,本申请还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的一种运动台的控制方法的步骤。
15、本申请提供的一种运动台的控制方法、装置、电子设备及存储介质,运动台设置有运动控制主系统,运动控制主系统包括执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块,执行器系统模块中至少包括用于驱动执行机构的伺服电机,方法包括响应于运行信号,按照运伺服电机的伺服周期采集执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块各自的运行数据;根据采集到的运行数据,确定运动台运行是否发生错误并确定错误类型;根据确定出的错误类型,执行对应的错误处理措施,依据错误的严重程度制定不同的处理策略,能够在保证精密运动台安全运行的前提,极大提高效率和工况质量。
16、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种运动台的控制方法,所述运动台设置有运动控制主系统,所述运动控制主系统包括执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块,所述执行器系统模块中至少包括用于驱动执行机构的伺服电机,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求1所述的方法,其特征在于,所述根据采集到的运行数据,确定所述运动台运行是否发生错误并确定错误类型的步骤具体包括:
4.根据权利要求3所述的方法,其特征在于,当错误类型为驱动错误时,通过以下方式执行错误处理措施:
5.根据权利要求1所述的方法,其特征在于,当错误类型为闭环反馈错误时,通过以下方式执行错误处理措施:
6.根据权利要求1所述的方法,其特征在于,当错误类型为行程错误时,通过以下方式执行错误处理措施:
7.根据权利要求1所述的方法,其特征在于,通过以下方式确定错误类型:
8.一种运动台的控制装置,所述运动台设置有运动控制主系统,所述运动控制主系统包括执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块,所述执行器系统模块中至少包括用于驱动执行机构的伺服电机,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述处理器执行所述机器可读指令,以执行如权利要求1至7任一所述运动台的控制方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1至7任一所述运动台的控制方法的步骤。
技术总结
本申请提供了一种运动台的控制方法、装置、电子设备及存储介质,其中,运动台设置有运动控制主系统,运动控制主系统包括执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块,执行器系统模块中至少包括用于驱动执行机构的伺服电机,方法包括响应于运行信号,按照运伺服电机的伺服周期采集执行器系统模块、轴模块、测量系统模块、设置点生成器模块和控制器模块各自的运行数据;根据采集到的运行数据,确定运动台运行是否发生错误并确定错误类型;根据确定出的错误类型,执行对应的错误处理措施以避免运动台运动发生异常,保证其工况质量。
技术研发人员:李红钢,陈曦,王俊杰,贾闯闯,卢孟
受保护的技术使用者:北京半导体专用设备研究所(中国电子科技集团公司第四十五研究所)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!