机器人控制方法以及机器人与流程
本申请涉及机器人,尤其涉及一种机器人控制方法以及机器人。
背景技术:
1、随着机器人技术的不断发展,越来越多的机器人被研发出来以辅助人类完成相关工作,比如服务机器人、巡检机器人等等。
2、相关技术中,机器人需要走出目标空间时,需要将自身位姿调整至目标朝向,比如朝向目标空间的门,在该情况下,机器人通常通过旋转操作来调整自身的姿态,以实现调整至目标朝向。比如,在上述目标空间为电梯时,机器人需要通过旋转操作来使得自身朝向电梯门或者电梯按键。
3、然而,在目标空间内障碍去较多的情况下,由于机器人自身轮廓的限制,其旋转操作通常会导致与障碍物发生碰撞,为避免该情况发生,此时机器人通常不进行姿态调整,以倒退姿态退出目标空间,然而,机器人背面的环境采集设备不够丰富,采集到的环境信息也不够丰富,这样机器人大概率无法准确走出目标空间。
技术实现思路
1、为解决上述技术问题,本申请实施例提供一种机器人控制方法以及机器人。
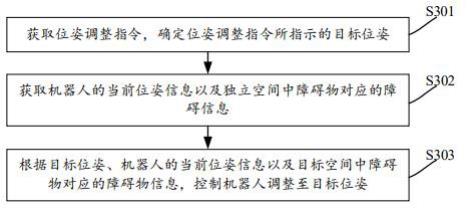
2、第一方面,本申请实施例提供一种机器人控制方法,该方法包括:获取位姿调整指令,确定位姿调整指令所指示的目标位姿,位姿调整指令用于指示机器人在目标空间内调整位姿,目标位姿至少包括目标朝向,目标朝向为机器人的第一部位朝向目标空间中的目标对象;获取机器人的当前位姿信息,以及目标空间中障碍物对应的障碍信息;根据目标位姿、机器人的当前位姿信息以及目标空间中障碍物对应的障碍信息,控制机器人调整至目标位姿。
3、第二方面,本申请实施例提供一种机器人,机器人包括:机身; 与机身通信的控制系统,控制系统包括处理器和与处理器通信的存储器,存储器存储指令,指令在处理器上被运行时使处理器执行操作,操作包括:获取位姿调整指令,确定位姿调整指令所指示的目标位姿,位姿调整指令用于指示机器人在目标空间内调整位姿,目标位姿至少包括目标朝向,目标朝向为机器人的第一部位朝向目标空间中的目标对象;获取机器人的当前位姿信息,以及目标空间中障碍物对应的障碍信息;根据目标位姿、机器人的当前位姿信息以及目标空间中障碍物对应的障碍信息,控制机器人调整至目标位姿。
4、第三方面,本申请实施例提供一种机器人控制装置,该装置包括:指令获取模块,用于获取位姿调整指令,确定位姿调整指令所指示的目标位姿,位姿调整指令用于指示机器人在目标空间内调整位姿,目标位姿至少包括目标朝向,目标朝向为机器人的第一部位朝向目标空间中的目标对象;信息获取模块,用于获取机器人的当前位姿信息,以及目标空间中障碍物对应的障碍信息;位姿调整模块,用于根据目标位姿、机器人的当前位姿信息以及目标空间中障碍物对应的障碍信息,控制机器人调整至目标位姿。
5、第四方面,本申请实施例提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序指令,计算机程序指令可被处理器调用执行如第一方面的机器人控制方法。
6、第五方面,本申请实施例提供一种计算机程序产品,当该计算机程序产品被执行时,器用于实现如第一方面所述的机器人控制方法。
7、本申请实施例提供的机器人控制方法,机器人在获取到位姿调整指令后,获取自身的当前位姿信息以及目标空间内障碍物对应的障碍信息,之后基于上述当前位姿信息、目标空间内障碍物对应的障碍信息以及目标位姿进行位姿调整,以使得机器人的第一部位能够朝向目标空间内的目标对象,使得机器人在狭窄空间内能够自主调整位姿,无需倒退走出狭窄空间,由于机器人正向上的环境采集设备更丰富,能够采集到更丰富的环境信息,机器人基于更丰富的环境信息来调整自身位姿,从而使得机器人能更准确地进行位姿调整。
技术特征:
1.一种机器人控制方法,其特征在于,所述方法包括:
2.根据权利要求1的方法,其特征在于,所述根据所述目标位姿、所述机器人的当前位姿信息以及所述目标空间中障碍物对应的障碍信息,控制所述机器人调整至所述目标位姿,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述目标位姿和所述机器人的当前位姿信息,检测所述可通行区域中是否包括目标调整区域,包括:
4.根据权利要求2所述的方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述目标位姿和所述机器人的当前位姿信息,确定所述机器人对应的子目标位姿,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述目标位姿和所述机器人的当前位姿信息,确定所述机器人的位姿向量,包括:
7.根据权利要求5所述的方法,其特征在于,所述根据所述机器人的当前位姿信息和所述目标空间中障碍物对应的障碍信息,确定所述机器人的障碍向量,包括:
8.根据权利要求1至7中任意一项所述的方法,其特征在于,所述获取位姿调整指令,包括:
9.根据权利要求1至7中任意一项所述的方法,其特征在于,所述方法还包括:
10.根据权利要求1至7中任意一项所述的方法,其特征在于,所述根据所述目标位姿、所述机器人的当前位姿信息以及所述目标空间中障碍物对应的障碍信息,控制所述机器人调整至所述目标位姿之后,还包括:
11.一种机器人,其特征在于,所述机器人包括:
12.根据权利要求11的机器人,其特征在于,所述根据所述目标位姿、所述机器人的当前位姿信息以及所述目标空间中障碍物对应的障碍信息,控制所述机器人调整至所述目标位姿,包括:
13.根据权利要求12所述的机器人,其特征在于,所述基于所述目标位姿和所述机器人的所述当前位姿信息,检测所述可通行区域中是否包括目标调整区域,包括:
14.根据权利要求12所述的机器人,其特征在于,所述根据所述目标位姿、所述机器人的当前位姿信息以及所述目标空间中障碍物对应的障碍信息,控制所述机器人调整至所述目标位姿,还包括:
15.根据权利要求14所述的机器人,其特征在于,所述根据所述目标位姿和所述机器人的当前位姿信息,确定所述机器人对应的子目标位姿,包括:
16.根据权利要求15所述的机器人,其特征在于,所述根据所述目标位姿和所述机器人的当前位姿信息,确定所述机器人的位姿向量,包括:
17.根据权利要求15所述的机器人,其特征在于,所述根据所述机器人的当前位姿信息和所述目标空间中障碍物对应的障碍信息,确定所述机器人的障碍向量,包括:
18.根据权利要求11至17中任意一项所述的机器人,其特征在于,所述获取位姿调整指令,包括:
19.根据权利要求11至17中任意一项所述的机器人,其特征在于,所述操作还包括:
20.根据权利要求11至17中任意一项所述的机器人,其特征在于,所述操作还包括:
技术总结
本申请公开了一种机器人控制方法以及机器人。该方法包括:获取位姿调整指令,确定位姿调整指令所指示的目标位姿;获取机器人的当前位姿信息,以及目标空间中障碍物对应的障碍信息;根据目标位姿、机器人的当前位姿信息以及目标空间中障碍物对应的障碍信息,控制机器人调整至目标位姿。本申请实施例提供的技术方案,使得机器人在狭窄空间内能够自主调整位姿,无需倒退走出狭窄空间,由于机器人正向上的环境采集设备更丰富,能够采集到更丰富的环境信息,机器人基于更丰富的环境信息来调整自身位姿,从而使得机器人能更准确地进行位姿调整。
技术研发人员:陈观鹏,陈盛军,涂强
受保护的技术使用者:深圳鹏行智能研究有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!