一种构建接触碰撞的张拉整体动力学模型的方法及系统
本发明属于张拉整体机器人,具体涉及一种构建接触碰撞的张拉整体动力学模型的方法及系统。
背景技术:
1、建立准确有效的动力学模型是进行张拉整体机器人运动控制的基础,学者们对于张拉整体机器人的动力学建模技术已经进行了大量研究,并提出了基于拉格朗日方程、牛顿欧拉方程以及有限元法等多种张拉整体机器人动力学建模方法。
2、在张拉整体机器人运动过程中,会与外界环境发生接触碰撞,因此,需要同时考虑张拉整体机器人自身的动力学特性以及其与外界环境之间的接触碰撞问题。
3、目前现有的张拉整体机器人运动过程中的动力学模型均为不连续的模型,需要首先分别建立机器人与环境接触和未发生接触时的动力学模型,再通过接触判定条件将两部分结合,得到机器人运动过程中的动力学模型。而张拉整体机器人在运动过程中往往需要接触状态与未接触状态的频繁切换,因此无法通过上述不连续的动力学模型建立连续统一的张拉整体机器人运动闭环控制框架,机器人运动过程中接触条件不断切换而造成的动力学模型不一致,导致机器人的运动路径的规划效率不高。
技术实现思路
1、针对现有技术存在的无法通过不连续的动力学模型建立连续统一的张拉整体机器人运动闭环控制框架,机器人运动过程中接触条件不断切换而造成的动力学模型不一致,导致机器人的运动路径的规划效率不高的问题。本发明提供了一种构建接触碰撞的张拉整体动力学模型的方法,克服了由于机器人运动过程中接触条件不断切换而造成的动力学模型不一致问题,提高了机器人的运动路径规划效率,使得机器人的运动路径更加平滑。
2、为达到上述目的,本发明采用了以下技术方案:
3、一种构建接触碰撞的张拉整体动力学模型的方法,包括:
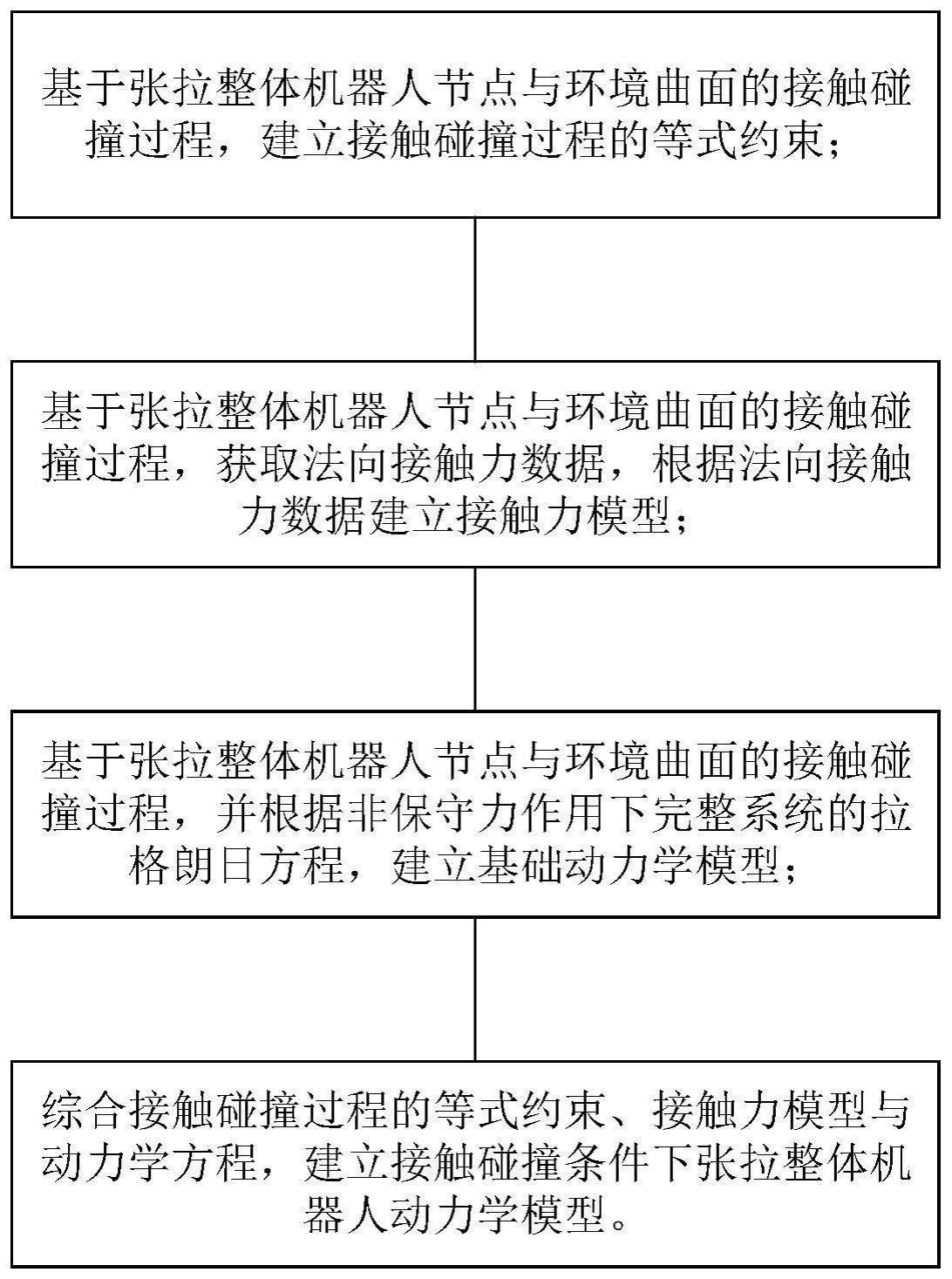
4、基于张拉整体机器人节点与环境曲面的接触碰撞过程,建立接触碰撞过程的等式约束;
5、基于张拉整体机器人节点与环境曲面的接触碰撞过程,获取法向接触力数据,根据法向接触力数据建立接触力模型;
6、基于张拉整体机器人节点与环境曲面的接触碰撞过程,并根据非保守力作用下完整系统的拉格朗日方程,建立基础动力学模型;
7、综合接触碰撞过程的等式约束、接触力模型与动力学方程,建立接触碰撞条件下张拉整体机器人动力学模型。
8、作为本发明的进一步改进,所述张拉整体机器人节点与环境曲面的接触碰撞过程,存在张拉整体机器人节点与环境曲面发生接触和没有发生接触状态;
9、当张拉整体机器人节点与环境曲面没有发生接触时,法向接触力为0;
10、当张拉整体机器人节点与环境曲面发生接触时,法向接触力大于等于0。
11、作为本发明的进一步改进,所述接触碰撞过程的等式约束的等式形式如下:
12、
13、其中,gi为碰撞距离;λni为法向接触力。
14、作为本发明的进一步改进,所述基于张拉整体机器人节点与环境曲面的接触碰撞过程,根据赫兹连续接触力模型,计算发生接触碰撞时张拉整体机器人节点处的法向接触力。
15、作为本发明的进一步改进,所述根据非保守力作用下完整系统的拉格朗日方程,选取杆构件的质心位置坐标及姿态四元数为广义坐标,建立基础动力学模型。
16、作为本发明的进一步改进,所述建立接触碰撞条件下张拉整体机器人动力学模型微分代数方程如下:
17、
18、φ(q)=o
19、
20、
21、其中,te为张拉整体机器人的动能;ug为张拉整体机器人的重力势能;qn为张拉整体机器人节点与接触曲面的接触碰撞过程的接触广义力;qf为张拉整体机器人节点与接触曲面的接触碰撞过程的摩擦广义力;qe为张拉整体机器人索构件拉力对应的广义力;δi为节点ni相对于环境曲面s沿方向的嵌入深度;λni为法向接触力;gi为碰撞距离;φ(q)为张拉整体机器人杆构件广义坐标的完整约束,λ为对应的拉格朗日乘子。
22、作为本发明的进一步改进,所述张拉整体机器人动力学模型的矩阵形式如下:
23、
24、
25、φ(q)=o
26、g(q,δ,λn)=o
27、其中,φ(q)为张拉整体机器人杆构件广义坐标的完整约束,λ为对应的拉格朗日乘子。
28、一种构建接触碰撞的张拉整体动力学模型的系统,包括:
29、建立等式约束模块:用于基于张拉整体机器人节点与环境曲面的接触碰撞过程,建立接触碰撞过程的等式约束;
30、建立接触力模型模块:用于基于张拉整体机器人节点与环境曲面的接触碰撞过程,获取法向接触力数据,根据法向接触力数据建立接触力模型;
31、建立基础动力学模型模块:用于基于张拉整体机器人节点与环境曲面的接触碰撞过程,并根据非保守力作用下完整系统的拉格朗日方程,建立基础动力学模型;
32、建立张拉整体机器人动力学模型模块:用于综合接触碰撞过程的等式约束、接触力模型与动力学方程,建立接触碰撞条件下张拉整体机器人动力学模型。
33、一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述一种构建接触碰撞的张拉整体动力学模型的方法的步骤。
34、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述一种构建接触碰撞的张拉整体动力学模型的方法的步骤。
35、与现有技术相比,本发明具有以下有益效果:
36、本发明克服了由于机器人运动过程中接触条件不断切换而造成的动力学模型不一致问题。它基于非保守力作用下完整系统的拉格朗日方程建立了具有一致形式的接触碰撞条件下张拉整体机器人动力学模型,该模型无需判断接触条件即可描述张拉整体机器人与外界环境之间的接触碰撞运动过程,为进行张拉整体机器人运动闭环控制奠定了基础。它具有良好的可扩展性,可在接触摩擦模型中增加多个碰撞接触面,实现多接触曲面条件下的张拉整体机器人动力学建模。通过本发明所建立的模型,使得机器人的运动路径更加平滑。
技术特征:
1.一种构建接触碰撞的张拉整体动力学模型的方法,其特征在于,包括:
2.根据权利要求1所述的一种构建接触碰撞的张拉整体动力学模型的方法,其特征在于,所述张拉整体机器人节点与环境曲面的接触碰撞过程,存在张拉整体机器人节点与环境曲面发生接触和没有发生接触状态;
3.根据权利要求1所述的一种构建接触碰撞的张拉整体动力学模型的方法,其特征在于,所述接触碰撞过程的等式约束的等式形式如下:
4.根据权利要求1所述的一种构建接触碰撞的张拉整体动力学模型的方法,其特征在于,所述基于张拉整体机器人节点与环境曲面的接触碰撞过程,根据赫兹连续接触力模型,计算发生接触碰撞时张拉整体机器人节点处的法向接触力。
5.根据权利要求1所述的一种构建接触碰撞的张拉整体动力学模型的方法,其特征在于,所述根据非保守力作用下完整系统的拉格朗日方程,选取杆构件的质心位置坐标及姿态四元数为广义坐标,建立基础动力学模型。
6.根据权利要求1所述的一种构建接触碰撞的张拉整体动力学模型的方法,其特征在于,所述建立接触碰撞条件下张拉整体机器人动力学模型微分代数方程如下:
7.根据权利要求6所述的一种构建接触碰撞的张拉整体动力学模型的方法,其特征在于,所述张拉整体机器人动力学模型的矩阵形式如下:
8.一种构建接触碰撞的张拉整体动力学模型的系统,其特征在于,包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现权利要求1-7任一项所述一种构建接触碰撞的张拉整体动力学模型的方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-7任一项所述一种构建接触碰撞的张拉整体动力学模型的方法的步骤。
技术总结
本发明公开了一种构建接触碰撞的张拉整体动力学模型的方法及系统,属于张拉整体机器人技术领域,方法包括基于张拉整体机器人节点与环境曲面的接触碰撞过程,建立接触碰撞过程的等式约束;基于张拉整体机器人节点与环境曲面的接触碰撞过程,获取法向接触力数据,根据法向接触力数据建立接触力模型;基于张拉整体机器人节点与环境曲面的接触碰撞过程,并根据非保守力作用下完整系统的拉格朗日方程,建立基础动力学模型;综合接触碰撞过程的等式约束、接触力模型与动力学方程,建立接触碰撞条件下张拉整体机器人动力学模型。本发明解决了由于机器人运动过程中接触条件不断切换而造成的动力学模型不一致问题。
技术研发人员:胡雪松,杨庶,王斌
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!