基于推力分配优化矩阵的船舶轨迹跟踪控制方法
本发明属于船舶运动控制。
背景技术:
1、随着世界经济的不断发展,陆地资源面临日益枯竭的危险,由于海洋中蕴藏着众多生物和矿产资源,是人类赖以生存的资源宝库,因此海洋资源和海底矿藏逐渐成为开发的重点。随着向海洋勘探和海洋能源开发需求的增加,发展海洋装备以便更好维护海洋权益,同时控制海洋空间和开发海洋资源变得尤为重要。相比于只装备了传统锚泊系统的船舶来讲,动力定位船具有机动性强、定位精度高等明显优势,同时动力定位船的定位成本不会随着水位的变深而增加,同时也能够避免锚泊对于海床的破坏性影响。随着海洋工程作业种类和数目的不断增多,动力定位船已经被广泛的应用于完成更复杂或者大型的海洋作业任务。
2、现有的大多动力定位船轨迹跟踪系统的性能问题主要表现为确保系统的跟踪误差能够收敛到一个有界集内,即保证系统的稳态性能,却忽略了瞬态性能对系统的影响。然而,当动力定位船完成某些特种作业任务时,过大的瞬态超调量不仅会降低船舶的作业效率,同时也可能导致船舶与平台或其它船舶发生碰撞,影响船舶作业的安全性。此外在动力定位船实际应用中,不考虑复杂推力分配方法的情况下,部分推进器可能因为推进系统的推力分配不均衡而早早达到饱和。输入饱和可能会降低系统性能,无法实现对参考轨迹的实时精确跟踪,甚至导致系统不稳定,严重时还可能会诱发严重事故。
技术实现思路
1、本发明是为了解决现有动力定位船瞬态超调量会降低船舶的作业效率并影响船舶作业安全,以及推进器过早输入饱和降低系统性能的问题,现提供基于推力分配优化矩阵的船舶轨迹跟踪控制方法。
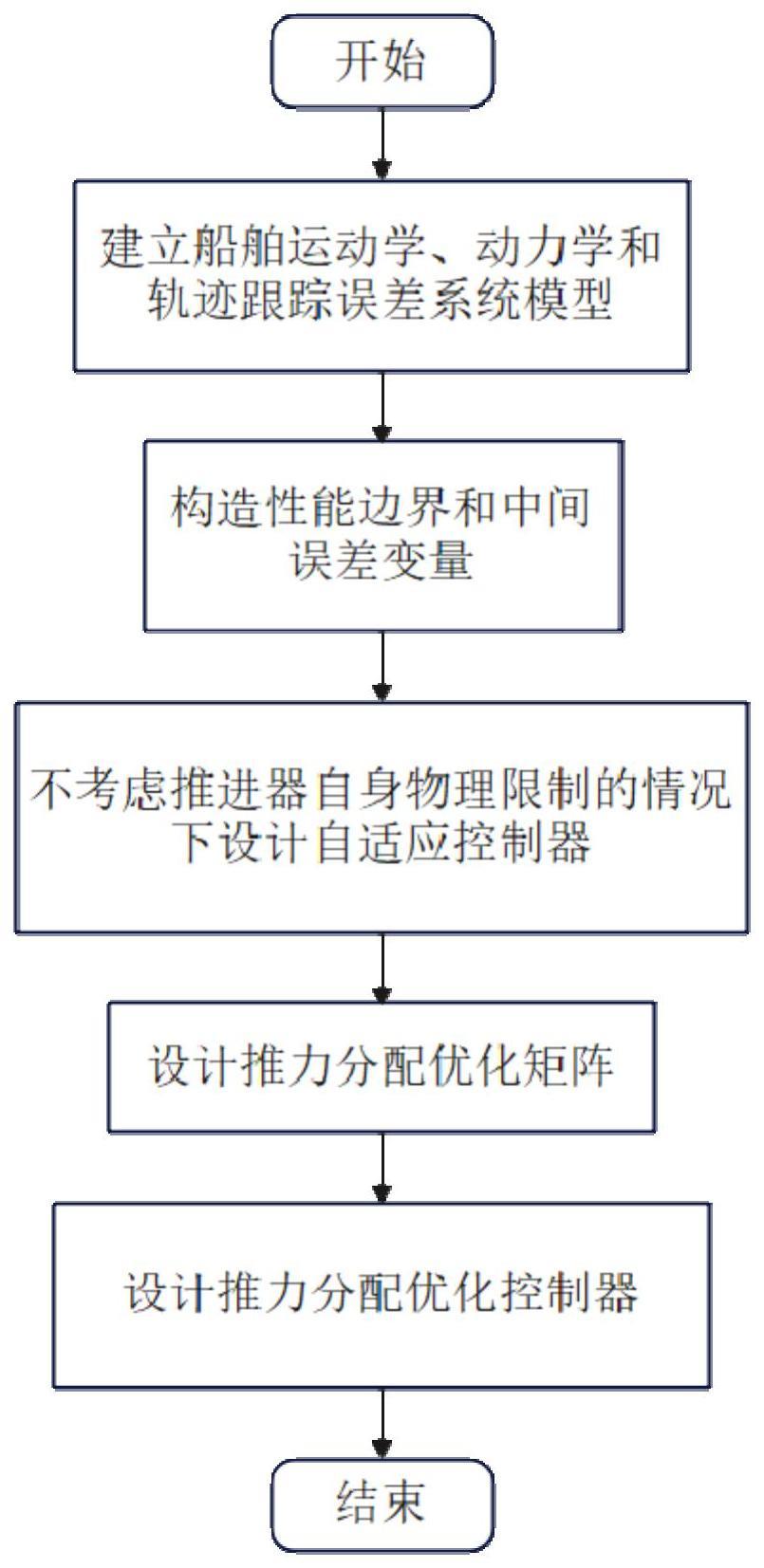
2、基于推力分配优化矩阵的船舶轨迹跟踪控制方法,包括以下步骤:
3、步骤一:在轨迹跟踪误差的性能边界约束条件下定义中间误差变量s:
4、
5、其中,为ηe的一阶导数,ηe为轨迹跟踪误差,β为光滑有界变量;
6、步骤二:根据中间误差变量s建立推进器的自适应控制器:
7、uc=-r(t)ttrt(ψ)s,
8、其中,uc为推进器的期望控制信号,t为推进器的配置矩阵,r(ψ)为北东坐标系和船体坐标系之间的转换矩阵,
9、
10、和分别为λ和ρ的估计值,λ=1/δ,δ为矩阵ttt的最小特征值相关量,ρ=λωmax,ωmax为船舶所受海洋环境干扰的最大值,为大于零的设计参数,
11、c1、c2、l2均为控制增益,
12、nσ=diag[nσ1,nσ2,nσ3],和σi分别为ηei上界和下界的时变预设性能函数,且表达式分别如下:
13、
14、
15、i=1,2,3,和σi0分别为上界和下界时变预设性能函数的初始值,和σi∞分别为上界和下界时变预设性能函数的稳定值,αi为决定收敛速度的参数,t为收敛时间;
16、步骤三:构建推力分配优化矩阵a且该推力分配优化矩阵a符合其中表示ta的第j列,j=1,2,...,q,a=diag[a1,a2,...,aq]为正定矩阵且有tj为t的第j列;
17、步骤四:利用推力分配优化矩阵a对推进器的自适应控制器进行改进,获得推力分配优化控制器:
18、
19、其中,ur为推进器的实际控制信号,um为推进器最大输出力矩;
20、步骤五:利用推力分配优化控制器获得各台推力器的实际控制信号并分别对各推力器进行控制,实现船舶轨迹的跟踪控制。
21、进一步的,上述轨迹跟踪误差ηe的表达式为:
22、ηe=η-ηd,
23、其中,η为船舶的实际轨迹,且有η=[x,y,ψ]t,(x,y)表示船舶实际位置坐标,ψ∈[0,2π]为船舶实际艏向角,ηd为船舶的期望轨迹。
24、进一步的,上述光滑有界变量β表达式为:
25、β=l1×i3×3-zσ,
26、其中,i3×3为3×3的单位矩阵,l1为大于0的常数,zσ=diag[zσ1,zσ2,zσ3],且zσi的具体表达式为:
27、
28、进一步的,上述推进器的配置矩阵t表达式为:
29、
30、其中,θj表示第j台推进器的推力输出角度,γj=lxjsin(θj)-lyjcos(θj),lxj和lyj分别为第j台推进器的横纵坐标。进一步的,上述和满足如下自适应律:
31、
32、
33、其中,和分别为和的一阶导数,χ1和μ1均为的修正参数,χ2和μ2均为的修正参数。
34、进一步的,船舶的轨迹跟踪误差系统模型为:
35、
36、其中,m*(η)=r(ψ)mrt(ψ),
37、
38、和分别为ηe的二阶导数和一阶导数,τ为船舶的控制输入向量,ω为船舶所受海洋环境的干扰向量,为η的一阶导数,c(υ)为科里奥利向心力矩阵,d(υ)为阻尼系数矩阵,m为惯性矩阵,υ=[u,v,r]t为船舶在船体坐标系下的速度矢量,u为纵荡速度,v为横荡速度,r为艏摇角速度。
39、进一步的,北东坐标系和船体坐标系之间的转换矩阵r(ψ)为:
40、
41、进一步的,当船舶的推进系统正常状态下存在:
42、τ=tur。
43、进一步的,上述控制增益c1、c2、l2的取值分别为:
44、c1=0.0005,c2=0.01,l2=0.5。
45、进一步的,上述常数l1=0.2。
46、本发明所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法相对于现有技术有如下优点:
47、(1)本发明基于预设性能思想构造性能边界,并直接利用性能边界设计时变障碍李雅普诺夫函数,无需进行误差转换,使得性能边界不仅可以更加灵活的选取,而且简化了设计过程并降低了系统的计算复杂度。同时该控制器不依赖于系统模型参数和外界环境干扰的先验信息,具有适用范围广、更贴合实际环境的特点。
48、(2)本发明通过构造taom,在仅依赖于推进器配置矩阵的前提下对控制器的指令信号优化分配,在降低推进器饱和现象发生概率的同时提高各推进器的利用效率,进而提升船舶的作业能力。
49、本发明能够应用于在作业过程中由于推力分配不均而导致部分推进器早早达到饱和进而影响最终作业效果的约束下船舶轨迹跟踪控制系统。
技术特征:
1.基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,所述轨迹跟踪误差ηe的表达式为:
3.根据权利要求1或2所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,所述光滑有界变量β表达式为:
4.根据权利要求1所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,所述推进器的配置矩阵t表达式为:
5.根据权利要求1所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,所述和满足如下自适应律:
6.根据权利要求2所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,船舶的轨迹跟踪误差系统模型为:
7.根据权利要求6所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,北东坐标系和船体坐标系之间的转换矩阵r(ψ)为:
8.根据权利要求6所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,当船舶的推进系统正常状态下存在:
9.根据权利要求1所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,控制增益c1、c2、l2的取值分别为:
10.根据权利要求3所述的基于推力分配优化矩阵的船舶轨迹跟踪控制方法,其特征在于,常数l1=0.2。
技术总结
基于推力分配优化矩阵的船舶轨迹跟踪控制方法,涉及船舶运动控制技术领域。本发明是为了解决现有动力定位船瞬态超调量会降低船舶的作业效率并影响船舶作业安全,以及推进器过早输入饱和降低系统性能的问题。本发明通过调节参数使推进器能够充分利用可用驱动功率来完成不同类型的作业要求,具有更好的鲁棒性和更大的适用范围且能够有效提高动力定位船作业的安全性和可靠性。并且通过构造TAOM,在仅依赖于推进器配置矩阵的情况下对控制器的指令信号进行优化分配,尽可能降低推进器输入饱和现象的发生概率,进一步保证船舶作业全过程瞬态性能和稳态性能约束得以满足。
技术研发人员:李鸣阳,齐耘艺,张卫东,谢文博,耿雄飞,张云飞,王海滨
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!