一种用于机器人避障的数据处理方法及装置与流程
本发明涉及机器人,尤其涉及一种用于机器人避障的数据处理方法及装置。
背景技术:
1、随着科技的快速发展,移动机器人已被广泛应用于包括工厂、仓库等各种环境中,在节约人力成本的同时,提高了生产效率。然而,复杂的应用场景对于移动机器人的避障功能也提出了更高的要求。因此,研究并开发有效的避障路径规划方法变得越来越重要。因此,提供一种用于机器人避障的数据处理方法及装置,以提高机器人避障路径规划的效率和精度,进而提高机器人避障控制的有效性。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种用于机器人避障的数据处理方法及装置有利于提高机器人避障路径规划的效率和精度,进而提高机器人避障控制的有效性。
2、为了解决上述技术问题,本发明实施例第一方面公开了一种用于机器人避障的数据处理方法,所述方法包括:
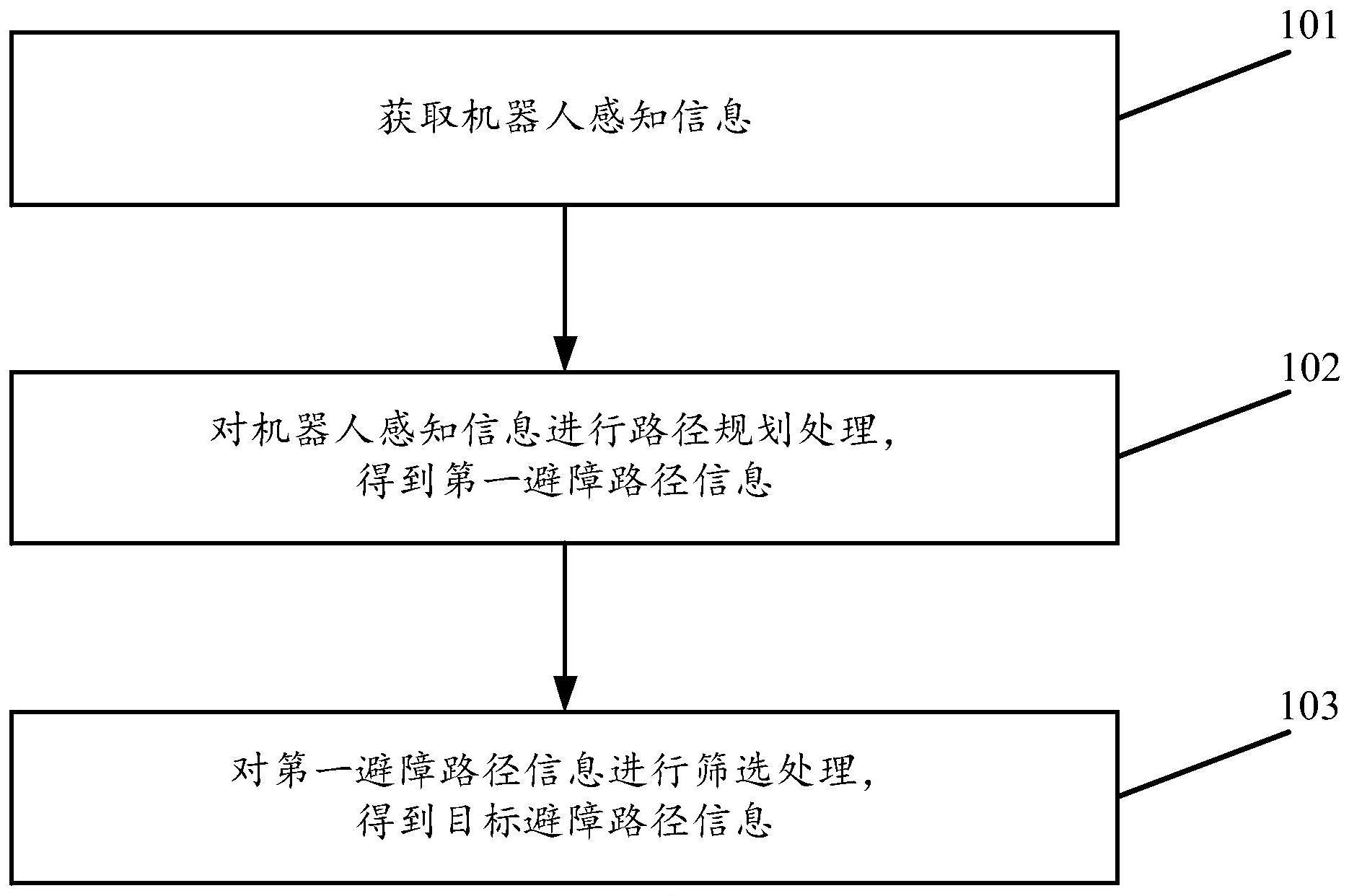
3、获取机器人感知信息;所述机器人感知信息包括第一位姿信息、机器人基础信息和道路距离信息;所述第一位姿信息包括若干个按时间先后顺序排列的时间位姿信息;所述时间位姿信息包括机器人时间位姿信息和障碍物时间位姿信息;所述机器人基础信息包括速度限值、机器人横摆角、机器人圆半径信息和障碍物圆半径信息;所述机器人圆半径信息包括机器人圆坐标信息和机器人圆约束半径;所述机器人圆坐标信息包括第一子机器人圆坐标信息和第二子机器人圆坐标信息;所述障碍物圆半径信息包括障碍物圆坐标信息和障碍物圆约束半径;所述障碍物圆坐标信息包括第一子障碍物圆坐标信息、第二子障碍物圆坐标信息和第三子障碍物圆坐标信息;
4、对所述机器人感知信息进行路径规划处理,得到第一避障路径信息;所述第一避障路径信息包括若干个路径避障约束信息和所述路径避障约束信息对应的路径约束力信息;所述路径避障约束信息包括横向路径约束信息、纵向路径约束信息、横向路径位姿信息和纵向路径约束信息;
5、对所述第一避障路径信息进行筛选处理,得到目标避障路径信息。
6、作为一种可选的实施方式,在本发明实施例第一方面中,所述对所述机器人感知信息进行路径规划处理,得到第一避障路径信息,包括:
7、对所述机器人感知信息进行参数转换,得到机器人路径参数信息;所述机器人路径参数信息包括若干个时间路径参数信息;所述时间路径参数信息包括机器人时间路径参数信息和障碍物时间路径参数信息;
8、对所述机器人感知信息和所述机器人路径参数信息进行路径规划,得到第一避障路径信息。
9、作为一种可选的实施方式,在本发明实施例第一方面中,所述对所述机器人感知信息进行参数转换,得到机器人路径参数信息,包括:
10、对于任一所述时间位姿信息,利用位姿转换模型对该时间位姿信息中的所述机器人时间位姿信息和所述障碍物时间位姿信息进行参数转换,得到该时间位姿信息对应的所述机器人时间路径参数信息和所述障碍物时间路径参数信息;
11、其中,所述位姿转换模型为:
12、
13、式中,分别为x时刻对应的所述时间路径参数信息的纵向位置值,纵向速度值和纵向加速度值;分别为x时刻的所述时间路径参数信息的横向位置值,横向速度值和横向加速度值;x和y分别为所述x时刻对应的时间位姿信息的横坐标值和纵坐标值;θr和θx分别为所述r时刻和所述x时刻对应的所述机器人基础信息中的所述机器人横摆角;kr和kx为分别为所述r时刻和所述x时刻对应的所述道路距离信息中的道路曲率;v,a分别为所述x时刻对应的所述时间位姿信息的机器人速度和机器人加速度;所述x时刻为所述r时刻的下一个时间采样单位对应的时间。
14、作为一种可选的实施方式,在本发明实施例第一方面中,所述对所述机器人感知信息和所述机器人路径参数信息进行路径规划,得到第一避障路径信息,包括:
15、基于所述道路距离信息中的最小道路距离和最大道路距离,确定出末端横向位置值信息;所述末端横向位置值信息包括若干个从小到大依次排列的末端横向位置值;
16、按时间顺序和所述末端横向位置值的排列顺序对所述机器人路径参数信息和所述末端横向位置值信息归类处理,得到横向参数信息序列;所述横向参数信息序列包括若干个横向参数信息;所述横向参数信息在所述横向参数信息序列中的排列顺序与所述末端横向位置值在所述末端横向位置值信息中的排列顺序是相一致的;所述横向参数信息包括若干个按时间顺序依次排列的横向姿态信息;所述横向姿态信息由左至右依次包括采样时间值、所述采样时间值对应的横向位置值、所述采样时间值对应的横向速度值和所述采样时间值对应的横向加速度值;相邻两个所述横向姿态信息对应的所述采样时间值间隔1个时间采样单位;
17、对于任一所述横向参数信息,对该横向参数信息进行五次多项式曲线拟合,得到该横向参数信息对应的横向路径约束信息和横向路径位姿信息;
18、基于所述机器人基础信息中的所述速度限值,确定出末端纵向速度值信息;所述末端纵向速度值信息包括若干个从小到大依次排列的末端纵向速度值;
19、按时间顺序和所述末端纵向速度值的排列顺序对所述机器人路径参数信息和所述末端纵向速度值信息归类处理,得到纵向参数信息序列;所述纵向参数信息序列包括若干个纵向参数信息;所述纵向参数信息在所述纵向参数信息序列中的排列顺序与所述末端纵向速度值在所述末端纵向速度值信息中的排列顺序是相一致的;所述纵向参数信息包括若干个按时间顺序依次排列的纵向姿态信息;所述纵向姿态信息由左至右依次包括所述采样时间值、所述采样时间值对应的纵向速度值和所述采样时间值对应的纵向加速度值;
20、对于任一所述纵向参数信息,对该纵向参数信息进行四次多项式曲线拟合,得到该纵向参数信息对应的纵向路径约束信息和纵向路径位姿信息;
21、基于所述采样时间值的对应关系,对所述横向路径约束信息、所述纵向路径约束信息、所述横向路径位姿信息和所述纵向路径约束信息进行融合,得到若干个所述路径避障约束信息;
22、对于任一所述路径避障约束信息,基于该路径避障约束信息、所述机器人基础信息和所述障碍物时间路径参数信息,确定出该路径避障约束信息对应的所述路径约束力信息。
23、作为一种可选的实施方式,在本发明实施例第一方面中,所述基于该路径避障约束信息、所述机器人基础信息和所述障碍物时间路径参数信息,确定出该路径避障约束信息对应的所述路径约束力信息,包括:
24、基于该路径避障约束信息和所述障碍物时间路径参数信息,确定出该路径避障约束信息对应的目标圆坐标信息;所述目标圆坐标信息包括第一目标圆坐标信息和第二目标圆坐标信息;所述第一目标圆坐标信息包括第一子目标圆坐标信息和第二子目标圆坐标信息;所述第二目标圆坐标信息包括第三子目标圆坐标信息和第四子目标圆坐标信息;
25、利用第一约束力模型对所述机器人圆坐标信息和所述障碍物圆坐标信息进行计算处理,得到第一约束力值u1;
26、其中,所述第一约束力模型为:
27、
28、式中,dji为所述机器人圆坐标信息中第j子机器人圆坐标信息对应的圆到所述障碍物圆坐标信息中第i子障碍物圆坐标信息对应的圆的第一圆心距;min(dji)为所有所述第一圆心距中的最小值;d1为第一距离阈值;r1和r2分别为所述机器人圆约束半径和所述障碍物圆约束半径;w和b分别为加权系数;
29、利用第二约束力模型对所述机器人圆坐标信息和所述第一目标圆坐标信息进行计算处理,得到第二约束力值u2;
30、其中,所述第二约束力模型为:
31、
32、式中,djk为所述机器人圆坐标信息中第j子机器人圆坐标信息对应的圆到所述第一目标圆坐标信息中第k子目标圆坐标信息对应的圆的第二圆心距;min(djk)为所有所述第二圆心距中的最小值;d2为第二距离阈值;
33、利用第三约束力模型对所述机器人圆坐标信息和所述第二目标圆坐标信息进行计算处理,得到第三约束力值u3;
34、其中,所述第三约束力模型为:
35、
36、式中,djl为所述机器人圆坐标信息中第j子机器人圆坐标信息对应的圆到所述第二目标圆坐标信息中第l子目标圆坐标信息对应的圆的第三圆心距;min(djk)为所有所述第三圆心距中的最小值;d3为第三距离阈值;
37、对所述第一约束力值、所述第二约束力值和所述第三约束力值进行求和计算,得到累计约束力值u;
38、判断所述累计约束力值是否小于等于约束力阈值,得到约束力判断结果;
39、当所述约束力判断结果为是时,确定所述累计约束力值为该路径避障约束信息对应的所述路径约束力信息中的目标路径约束力值;
40、当所述约束力判断结果为否时,确定所述约束力阈值为该路径避障约束信息对应的所述路径约束力信息中的目标路径约束力值。
41、作为一种可选的实施方式,在本发明实施例第一方面中,所述基于该路径避障约束信息和所述障碍物时间路径参数信息,确定出该路径避障约束信息对应的目标圆坐标信息,包括:
42、利用内外圆心距模型对该路径避障约束信息和所述障碍物时间路径参数信息进行计算处理,得到内外圆心距信息;所述内外圆心距信息包括第一内外圆心距和第二内外圆心距;
43、其中,所述内外圆心距模型为:
44、
45、式中,d12和d21分别为所述第一内外圆心距和所述第二内外圆心距;k1和k2均为圆心距系数;为纵向相对速度,为该路径避障约束信息中末端时刻对应的纵向速度值;为所述障碍物时间路径参数信息中当前时刻对应的纵向速度值;n为距离常数;
46、利用圆心计算模型对所述内外圆心距信息进行计算,得到圆心横向坐标值信息;所述圆心横向坐标值信息包括所述第一子目标圆坐标信息对应的圆心横向坐标值、所述第二子目标圆坐标信息对应的圆心横向坐标值、所述第三子目标圆坐标信息对应的圆心横向坐标值、所述第四子目标圆坐标信息对应的圆心横向坐标值;
47、其中,所述圆心计算模型为:
48、
49、式中,yx1为第一子目标圆坐标信息对应的圆心横向坐标值;yx2为第二子目标圆坐标信息对应的圆心横向坐标值;yx3为第三子目标圆坐标信息对应的圆心横向坐标值;yx4为第四子目标圆坐标信息对应的圆心横向坐标值;s1为障碍物时间路径参数信息中当前时刻对应的纵向位置值;adq为当前时刻对应的时间位姿信息的机器人加速度;
50、基于所述圆心横向坐标值信息和所述障碍物时间路径参数信息中当前时刻对应的横向位置值,得到该路径避障约束信息对应的目标圆坐标信息。
51、作为一种可选的实施方式,在本发明实施例第一方面中,所述对所述第一避障路径信息进行筛选处理,得到目标避障路径信息,包括:
52、对于任一所述路径避障约束信息,利用位置差计算模型对该路径避障约束信息中末端时刻对应的横向位置值和所述机器人时间路径参数信息中当前时刻的横向位置值进行计算处理,得到该路径避障约束信息对应的位置偏差值;
53、其中,所述位置差计算模型为:
54、dwp=dmd-ddq;
55、式中,dwp为所述路径避障约束信息对应的位置偏差值;dmd为所述路径避障约束信息中末端时刻对应的横向位置值;ddq为所述机器人时间路径参数信息中当前时刻的横向位置值;
56、利用速度差计算模型对该路径避障约束信息中末端时刻对应的纵向速度值和所述机器人时间路径参数信息中当前时刻的纵向速度值进行计算处理,得到该路径避障约束信息对应的速度偏差值;
57、其中,所述速度差计算模型为:
58、
59、式中,为所述路径避障约束信息对应的速度偏差值;为所述路径避障约束信息中末端时刻对应的纵向速度值;为所述机器人时间路径参数信息中当前时刻的纵向速度值;
60、利用所述位置偏差值、所述速度偏差值,对所述第一避障路径信息对多目标优化模型进行求解,得到最小多目标优化值;
61、确定所述最小多目标优化值对应的所述路径避障约束信息为目标避障路径信息;
62、其中,所述多目标优化模型为:
63、
64、式中,jdmb为所述最小多目标优化值;ω1、ω2和ω3均为加权系数;alateral、alongitudinal和cpath分别为所述横向路径约束信息中的横向加速度约束值、所述纵向路径约束信息中的纵向加速度约束值和所述纵向路径约束信息中的最大曲率约束值;alateral,max、alongitudinal,max和cmax分别为所述横向加速度约束值对应的阈值、所述纵向加速度约束值对应的阈值和所述最大曲率约束值对应的阈值。
65、本发明实施例第二方面公开了一种用于机器人避障的数据处理装置,装置包括:
66、获取模块,用于获取机器人感知信息;所述机器人感知信息包括第一位姿信息、机器人基础信息和道路距离信息;所述第一位姿信息包括若干个按时间先后顺序排列的时间位姿信息;所述时间位姿信息包括机器人时间位姿信息和障碍物时间位姿信息;所述机器人基础信息包括速度限值、机器人横摆角、机器人圆半径信息和障碍物圆半径信息;所述机器人圆半径信息包括机器人圆坐标信息和机器人圆约束半径;所述机器人圆坐标信息包括第一子机器人圆坐标信息和第二子机器人圆坐标信息;所述障碍物圆半径信息包括障碍物圆坐标信息和障碍物圆约束半径;所述障碍物圆坐标信息包括第一子障碍物圆坐标信息、第二子障碍物圆坐标信息和第三子障碍物圆坐标信息;
67、第一处理模块,用于对所述机器人感知信息进行路径规划处理,得到第一避障路径信息;所述第一避障路径信息包括若干个路径避障约束信息和所述路径避障约束信息对应的路径约束力信息;所述路径避障约束信息包括横向路径约束信息、纵向路径约束信息、横向路径位姿信息和纵向路径约束信息;
68、第二处理模块,用于对所述第一避障路径信息进行筛选处理,得到目标避障路径信息。
69、本发明第三方面公开了另一种用于机器人避障的数据处理装置,所述装置包括:
70、存储有可执行程序代码的存储器;
71、与所述存储器耦合的处理器;
72、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明实施例第一方面公开的用于机器人避障的数据处理方法中的部分或全部步骤。
73、本发明第四方面公开了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明实施例第一方面公开的用于机器人避障的数据处理方法中的部分或全部步骤。
74、与现有技术相比,本发明实施例具有以下有益效果:
75、本发明实施例中,获取机器人感知信息;机器人感知信息包括第一位姿信息、机器人基础信息和道路距离信息;第一位姿信息包括若干个按时间先后顺序排列的时间位姿信息;时间位姿信息包括机器人时间位姿信息和障碍物时间位姿信息;机器人基础信息包括速度限值、机器人横摆角、机器人圆半径信息和障碍物圆半径信息;机器人圆半径信息包括机器人圆坐标信息和机器人圆约束半径;机器人圆坐标信息包括第一子机器人圆坐标信息和第二子机器人圆坐标信息;障碍物圆半径信息包括障碍物圆坐标信息和障碍物圆约束半径;障碍物圆坐标信息包括第一子障碍物圆坐标信息、第二子障碍物圆坐标信息和第三子障碍物圆坐标信息;对机器人感知信息进行路径规划处理,得到第一避障路径信息;第一避障路径信息包括若干个路径避障约束信息和路径避障约束信息对应的路径约束力信息;路径避障约束信息包括横向路径约束信息、纵向路径约束信息、横向路径位姿信息和纵向路径约束信息;对第一避障路径信息进行筛选处理,得到目标避障路径信息。可见,本技术有利于提高机器人避障路径规划的效率和精度,进而提高机器人避障控制的有效性。
- 还没有人留言评论。精彩留言会获得点赞!