一种时变分组编队跟踪控制方法、系统及电子设备
本发明涉及非电变量控制,特别是涉及一种时变分组编队跟踪控制方法、系统及电子设备。
背景技术:
1、在过去的几十年里,集群系统的编队跟踪控制问题一直受到研究人员的关注,也被广泛应用于军事和民用领域,如多机器人合作、频谱感应和协作定位等。
2、在集群系统编队跟踪领域,y.hong研究了对单目标的编队跟踪控制问题,x.dong针对二阶集群系统提出了一个平均编队跟踪控制协议,实现了集群对多个目标的平均状态进行跟踪,他进一步针对二阶和高阶系统提出了时变编队跟踪协议。q.wang研究了有向集群系统的控制协议,其中目标具有未知输入且集群内每一个智能体具有不同的状态方程。y.zhang考虑到了非合作目标问题,提出了基于卡尔曼滤波的分布式多传感设备多目标滤波算法,并利用状态估计值设计控制协议,实现对多个非合作目标的编队跟踪。
3、由于在编队跟踪多目标的过程中存在多个目标之间位置和速度具有较大差异的情况,j.hu提出了分组编队跟踪控制协议。设计针对多个非合作目标的时变分组编队控制协议需要解决两个子问题,即时变分组编队跟踪控制协议的设计和非合作目标的状态估计。
4、y.zhou提出了针对线性集群系统的分组编队跟踪控制协议,并考虑的切换拓扑和未知输入的情况。j.hu基于完全分布式算法,提出了分布式自适应分组编队跟踪控制协议,l.tian在切换拓扑的情况下,也提出了分布式自适应分组编队控制协议。y.zhou进一步考虑了具有未知输入的时变分组编队-合围问题。
5、近年来,分布式多传感设备多目标滤波问题受到了广泛关注,与集中式滤波算法相比,它具有实时性强、容错性强和易扩展等优点,可分为采用数据关联(dataassociation,da)和随机有限集(random finite set,rfs)两种方法。使用rfs的分布式滤波方法计算速度很快,但它的理论研究不够完善且更难在现实中使用。
6、当面临高机动目标,传感设备观测失败和数据丢失等情况时,会产生间歇性观测问题。b. sinopoli研究了基于间歇性观测的卡尔曼滤波算法,论证了估计误差协方差和观测概率的关系,并通过伯努利过程表示观测值。m. y. huang引入了马尔科夫链对观测值进行建模,并证明了估计误差协方差矩阵的有界性。近年来,研究者进一步研究了基于间歇性观测的扩展卡尔曼滤波(extended kalman filter,ekf)、容积卡尔曼滤波(cubaturekalman filter,ckf)、无损卡尔曼滤波(unscented kalman filter,ukf)算法。
7、然而,在大多数实际场景中,目标的状态是未知的,也就是说,目标是非合作的。在以前的工作中,y. zhou将多目标滤波与编队跟踪问题结合起来,提出了异质二阶系统的编队跟踪控制协议,但他们没有考虑非线性观测模型和分组编队的情况。基于间歇性观测和非线性观测模型的分布式多传感设备多目标滤波,设计时变分组编队跟踪控制方法仍是一个需要解决的重要问题。
技术实现思路
1、为解决现有技术存在的上述问题,本发明提供了一种基于间歇性观测和分布式多传感设备多目标滤波的时变分组编队跟踪控制方法、系统及电子设备。
2、为实现上述目的,本发明提供了如下方案。
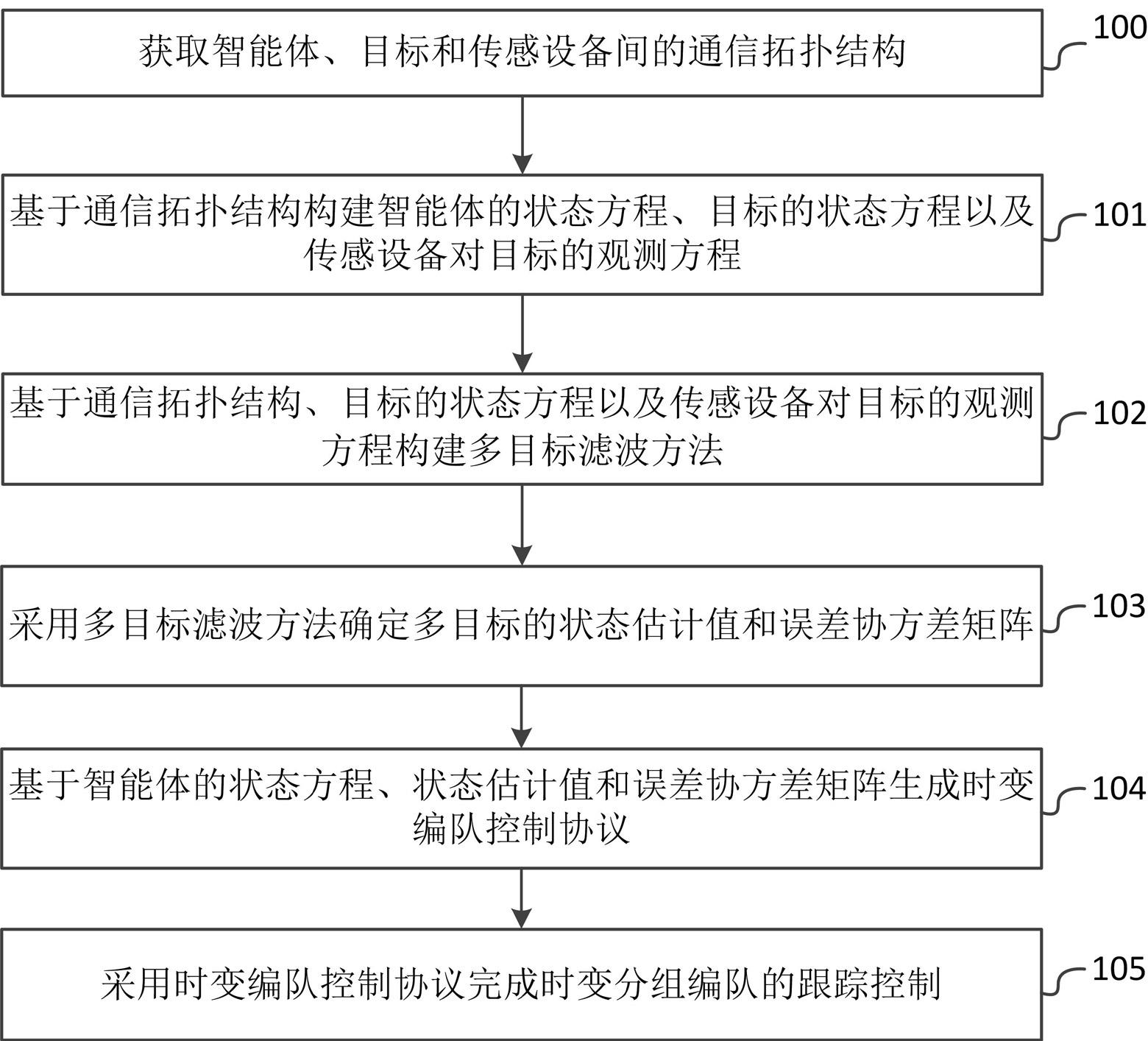
3、一种时变分组编队跟踪控制方法,包括:获取智能体、目标和传感设备间的通信拓扑结构。
4、基于所述通信拓扑结构构建智能体的状态方程、目标的状态方程以及传感设备对目标的观测方程。
5、基于所述通信拓扑结构、所述目标的状态方程以及所述传感设备对目标的观测方程构建多目标滤波方法。所述多目标滤波方法为基于间歇性观测的分布式传感设备的滤波方法。
6、采用所述多目标滤波方法确定多目标的状态估计值和误差协方差矩阵。
7、基于智能体的状态方程、所述状态估计值和所述误差协方差矩阵生成时变编队控制协议。
8、采用所述时变编队控制协议完成时变分组编队的跟踪控制。
9、可选地,采用所述多目标滤波方法确定多目标的状态估计值和误差协方差矩阵,具体包括:确定当前时刻的状态估计值和误差协方差矩阵。
10、基于当前时刻的状态估计值和误差协方差矩阵预测得到下一时刻的状态估计值和误差协方差矩阵。
11、基于下一时刻的状态估计值和误差协方差矩阵得到容积点预测值。
12、基于所述容积点预测值确定容积点量测预测值,并基于所述容积点量测预测值得到量测值。
13、基于所述容积点量测预测值和所述量测值对下一时刻的状态估计值和误差协方差矩阵进行更新。
14、采用一致性迭代方法基于更新后的下一时刻的状态估计值和误差协方差矩阵得到多目标的状态估计值和误差协方差矩阵。
15、可选地,智能体、目标和传感设备间的通信拓扑结构的构建过程包括:
16、将集群系统、目标和传感设备划分为多个子群。每一集群系统包括多个智能体。传感设备只对和它位于同一子群内的目标进行观测和状态估计。集群系统围绕同一子群内的多目标凸组合形成子编队,并分别对多目标进行时变分组编队跟踪。
17、在每一子群中,将智能体、目标和传感设备间的相互作用的拓扑关系描述为有向图和无向图,以生成所述通信拓扑结构。
18、可选地,采用所述多目标滤波方法确定多目标的状态估计值和误差协方差矩阵,具体包括:初始化得到当前时刻位于子群内的每一传感设备对子群内所有目标的状态估计值和误差协方差矩阵,或采用一致性迭代方法得到当前时刻位于子群内的每一传感设备对子群内所有目标的状态估计值和误差协方差矩阵。
19、基于初始化得到的状态估计值和误差协方差矩阵,或一致性迭代得到的状态估计值和误差协方差矩阵,对下一时刻多目标的状态估计值和误差协方差矩阵进行预测。
20、通过预测得到的下一时刻多目标的状态估计值和误差协方差矩阵得到容积点预测值和容积点量测预测值。
21、通过容积点量测预测值对预测得到的状态估计值和误差协方差矩阵进行更新,进而得到子群内传感设备对所有目标的状态估计值。
22、初始化更新后的状态估计值和误差协方差矩阵,并对初始化后的、更新后的状态估计值和误差协方差矩阵进行一致性迭代处理,直至子群内传感设备对目标的状态估计值和协方差估计值趋于一致时,得到多目标的状态估计值和误差协方差矩阵。
23、一种时变分组编队跟踪控制系统,用于应用上述提供的时变分组编队跟踪控制方法。所述系统包括:拓扑结构获取模块、方程构建模块、滤波方法构建模块、状态及矩阵确定模块、控制协议生成模块和跟踪控制模块。
24、拓扑结构获取模块,用于获取智能体、目标和传感设备间的通信拓扑结构。
25、方程构建模块,用于基于所述通信拓扑结构构建智能体的状态方程、目标的状态方程以及传感设备对目标的观测方程。
26、滤波方法构建模块,用于基于所述通信拓扑结构、所述目标的状态方程以及所述传感设备对目标的观测方程构建多目标滤波方法。所述多目标滤波方法为基于间歇性观测的分布式传感设备的滤波方法。
27、状态及矩阵确定模块,用于采用所述多目标滤波方法确定多目标的状态估计值和误差协方差矩阵。
28、控制协议生成模块,用于基于智能体的状态方程、所述状态估计值和所述误差协方差矩阵生成时变编队控制协议。
29、跟踪控制模块,用于采用所述时变编队控制协议完成时变分组编队的跟踪控制。
30、一种电子设备,包括:存储器和处理器。
31、存储器,用于存储计算机程序。
32、处理器,与所述存储器连接,用于调取并执行所述计算机程序,以实施上述提供的时变分组编队跟踪控制方法。
33、可选地,所述存储器为计算机可读存储介质。
34、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明基于通信拓扑结构构建智能体的状态方程、目标的状态方程以及传感设备对目标的观测方程后,以这些方程为基础构建基于间歇性观测的分布式传感设备的滤波方法,这一方法具有较好的可拓展性与自组织性,能够分布式运行。并且,本发明采用基于间歇性观测的分布式传感设备的滤波方法确定多目标的状态估计值和误差协方差矩阵,以生成时变编队控制协议,采用生成的这一时变编队控制协议完成时变分组编队的精确跟踪控制,还能够提高编队控制中的计算与信息使用效率。
- 还没有人留言评论。精彩留言会获得点赞!