沉浸式实景展演的多智能体分布式无迹模型预测控制方法
本发明涉及多智能体的协同控制,具体涉及一种沉浸式实景展演的多智能体分布式无迹模型预测控制方法。
背景技术:
1、实景展演是展现优秀传统文化基因的重要方式之一,也是传承弘扬、创新发展优秀传统文化的重要载体之一。现如今,面向沉浸式实景展演技术与场景创新的研究具有重要的现实意义。展演异构设备的协同控制是展演控制技术发展的趋势。如何通过研发一套集成控制系统,稳定可靠地实现实景展演设备在演出过程中的完美配合,以及与演员和观众的实时交互,对实景展演异构设备的协同控制具有重要意义。然而,在目前的实景展演中,围绕旅游景区沉浸式展演系统的构建上,存在着信息感知能力弱、集成控制繁杂等缺点。多智能体共识控制能够有效解决现有沉浸式实景展演的问题。在实景展演多智能体共识控制中,智能体之间能够相互感知和交流信息,并通过合作和协调实现共同目标。每个智能体都具有一定的自主性和决策能力,可以根据实景展演的要求进行局部决策,并与其他智能体共同调整控制策略,以实现实景展演整体性能的最优化。分布式模型预测控制(dmpc)是一种很有前景的多智能体系统共识控制方法,它能够处理多变量控制问题并明确适应约束。目前,已经提出了各种解决mpc框架中参数不确定性问题的方法。然而,对于展演异构设备的协同控制,如果状态未知或者系统计算资源有限,目前学者提出的方法都不适用。
2、因此,在未来的研究中,需要致力于解决展演异构设备协同控制中状态未知或系统计算资源有限的问题,以进一步完善实景展演技术,提升展演的效果与体验。
技术实现思路
1、为了克服现有技术的不足,本发明提供了一种用于沉浸式实景展演的多智能体分布式无迹模型预测控制方法,在参数不确定的情况下,实现了智能体的协同控制,提升展演的效果与体验。
2、本发明解决其技术问题所采用的技术方案是:
3、一种沉浸式实景展演的多智能体分布式无迹模型预测控制方法,所述方法包括以下步骤:
4、1)建立沉浸式实景展演的智能体的辅助模型;
5、2)定义智能体的代价函数;
6、3)利用无迹卡尔曼滤波方法,实现对的高斯近似;
7、4)设计分布式模型预测控制器。
8、进一步,所述步骤1)的过程如下:
9、基于欧拉—拉格朗日法,智能体i=1,…,m在任务空间中满足约束的动力学定义如下:
10、
11、其中,xi,分别为扩展的位置、速度和加速度,为任务空间控制力,ji为从关节空间到任务空间的雅可比矩阵,为外部扰动所产生的外力,为正定惯性矩阵,为包括哥氏力、离心力和重力的混合项,为输入变换矩阵,m为智能体的总数量;
12、采用非线性反馈技术,定义如下辅助控制律
13、
14、将非线性反馈律(2)代入动力学方程(1),得到线性化的辅助模型:
15、
16、令辅助系统(3)改写为:
17、xi,k+1=aixi,k+biui,k (4)
18、s.t.
19、
20、
21、
22、其中,k∈n0为离散时刻,n0为自然数的集合,t为采样周期,i为具有适当维数的单位矩阵,为包含原点的紧集,s为广义任务空间位置的维数,为不确定参数,它与模型参数或力学没有任何关联;
23、令智能体辅助模型重构为:
24、
25、其中,xei,k+1=[xi,k+1,ρi,k+1]t为包含不确定参数的扩展状态,wi,k,vi,k分别为过程扰动和测量噪声,它们均为不相关的零均值高斯白噪声,ρi由ρi,k+1=ρi,k+wi,k更新,ci为系数矩阵,由m个智能体组成的协作系统的网络拓扑结构用一个无向图来描述,即如果智能体和相邻,它们可以相互通信。
26、再进一步,所述步骤2)的过程如下:
27、根据系统(5),定义智能体的价函数:
28、
29、其中,为智能体在k+l时刻根据k时刻得到的估计状态,为相邻智能体的估计状态,ui,k+l∣k为预测的控制输入,n为预测步长,rei为智能体的参考轨迹,qi,ri分别为半正定权重矩阵和正定权重矩阵,pi为终端权重矩阵,wij为智能体与相邻智能体之间协作约束的惩罚加权矩阵,ni为智能体的邻域集合,dij为智能体与相邻智能体之间的期望距离,dij+di=dj。
30、更进一步,所述步骤3)的过程如下:
31、通过下式计算2l+1个信号点:
32、
33、其中,分别为扩展状态xei,k+l的均值和协方差,λ=α2(l+κ)-l为减少总预测误差的缩放参数,l为状态维数,κ和α为缩放参数;
34、均值和协方差的近似矩阵定义为:
35、
36、其中,β用于整合关于高斯分布近似的知识;
37、根据式(5)和(7),预测的均值和协方差为:
38、
39、其中,为过程噪声wi,k+l的协方差;
40、结合式(9)和式(5),得:
41、
42、
43、
44、
45、其中,为测量噪声vi,k+l+1的协方差;
46、预测均值和协方差的更新律如下
47、
48、
49、其中,kk+l+1∣k为卡尔曼增益矩阵,且
50、令状态预测方程的等效非线性映射近似如下:
51、
52、其中,gi为高斯函数,是式(7)~(14)的一般概括。
53、所述步骤4)的过程如下:
54、在无迹卡尔曼滤波的估计误差有界的情况下,将预测方程(5)的非线性近似重写为带有有界估计误差的线性时不变模型:
55、
56、其中,为常数矩阵,wi,k为估计误差,满足为估计误差的上界;
57、结合式(6)和式(15),得到智能体的优化问题为:
58、
59、s.t.
60、
61、
62、
63、
64、
65、通过matlab中的有效集法求解优化问题(17),得到最优控制序列并根据式(15)应用uk的第一个元素来更新智能体的状态;
66、当预测步长大于控制步长时,相应控制序列构造如下:
67、
68、其中,ki为误差反馈增益矩阵,为求解优化问题(17)得到的最优控制序列;
69、终端权重矩阵p和误差反馈矩阵ki的设计如下所示:
70、
71、其中,
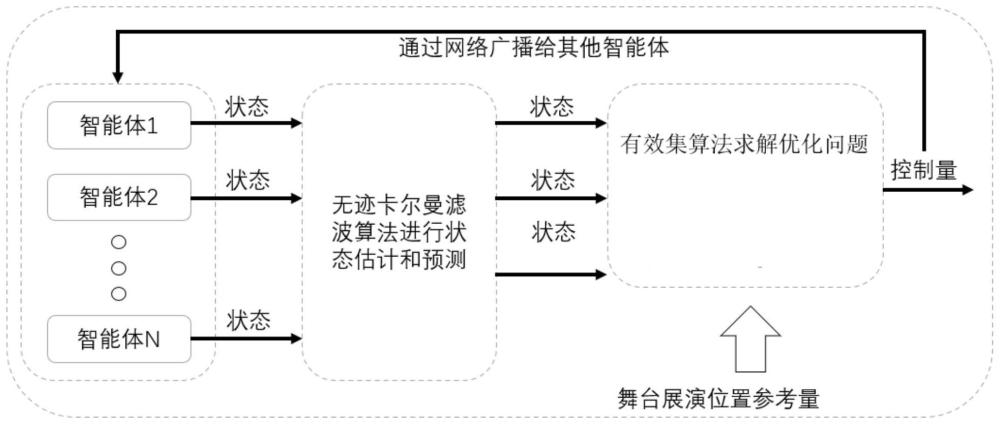
72、优选的,所述步骤4)中,根据分析得用于多智能体的分布式无迹模型预测控制过程为:
73、s1:初始化:令k=0,初始化系统参数、mpc参数和无迹卡尔曼滤波参数等;
74、s2:状态估计和预测:使用无迹卡尔曼滤波获得式(6)中状态分布的高斯近似;
75、s3:有效集优化:利用有效集算法求解优化问题(17),得到最优控制序列ui,k;
76、s4:状态更新:选取最优控制序列ui,k的第一个元素作为时刻k的控制输入,通过式(16)更新智能体的状态;
77、s5:通信交互:将最优控制序列的第一个元素通过无线网络传递给其邻域内的智能体;
78、s6:滚动时域:令k=k+1,跳转至s2。
79、本发明的技术构思为:首先,建立智能体的辅助模型;其次,定义智能体的代价函数;然后,利用无迹卡尔曼滤波方法,实现对预测状态的高斯近似;最后,设计分布式模型预测控制器。
80、本发明的有益效果主要表现在:针对参数不确定的多智能体的协同控制,设计了一种分布式无迹mpc(dumpc)策略;利用无迹卡尔曼滤波方法得到非线性系统模型的概率分布来逼近实际系统模型,完善实景展演技术,提升展演的效果与体验。
- 还没有人留言评论。精彩留言会获得点赞!