一种真空蝶阀控制方法、系统、电子设备及存储介质与流程
本技术涉及真空蝶阀,具体而言,涉及一种真空蝶阀控制方法、系统、电子设备及存储介质。
背景技术:
1、真空蝶阀为能够改变气流方向、调节气流量大小、切断或接通管路的真空系统元件,由于真空蝶阀具有运行稳定、响应快等特点,因此其被广泛应用在半导体气相沉积设备、刻蚀设备、新型显示设备、高端制造设备、真空镀膜设备及新材料科研设备中。
2、现有技术通过调节真空蝶阀的阀门位置的方式来调节腔室内的气压,但由于现有技术需要通过人工的方式调节真空蝶阀的阀门位置,因此现有技术存在由于需要通过人工的方式调节真空蝶阀的阀门位置而导致无法根据腔室内的气压自适应调整真空蝶阀的阀门位置、调节效率低和调节精度差的问题。
3、针对上述问题,目前尚未有有效的技术解决方案。
技术实现思路
1、本技术的目的在于提供一种真空蝶阀控制方法、系统、电子设备及存储介质,能够根据腔室内的气压自适应调节真空蝶阀的阀门位置,从而有效地提高真空蝶阀的调节效率和调节精度。
2、第一方面,本技术提供了一种真空蝶阀控制方法,其包括以下步骤:
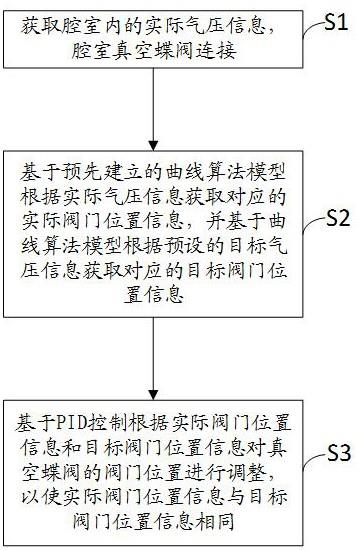
3、获取腔室内的实际气压信息;
4、基于预先建立的曲线算法模型根据实际气压信息获取对应的实际阀门位置信息,并基于曲线算法模型根据预设的目标气压信息获取对应的目标阀门位置信息,曲线算法模型如式(1)所示:
5、 (1);
6、其中,f(x)表示气压,x表示真空蝶阀的阀门位置,α、β和γ均为常数;
7、基于pid控制根据实际阀门位置信息和目标阀门位置信息对真空蝶阀的阀门位置进行调整,以使实际阀门位置信息与目标阀门位置信息相同。
8、本技术提供的一种真空蝶阀控制方法,先基于曲线算法模型根据实际气压信息和目标气压信息获取实际阀门位置信息和目标阀门位置信息,再基于pid控制根据实际阀门位置信息和目标阀门位置信息对真空蝶阀的阀门位置进行调整,以使实际阀门位置信息与目标阀门位置信息相同,即本技术相当于一种实时获取腔室内的气压并根据该气压自适应调节真空蝶阀的阀门位置的方法,由于本技术的真空蝶阀控制方法能够根据腔室内的气压自适应调节真空蝶阀的阀门位置,而无需通过人工的方式调节真空蝶阀的阀门位置,因此本技术能够有效地提高真空蝶阀的调节精度,而由于本技术能够实时监测腔室内的气压,并在腔室内的气压发生变化时及时调节真空蝶阀的阀门位置,因此本技术还能够有效地提高真空蝶阀的调节效率。
9、可选地,曲线算法模型的预先建立过程包括以下步骤:
10、基于预设步长和预设步数调整真空蝶阀的阀门位置,并获取每次调整阀门位置后的标定阀门位置信息和对应的标定气压信息;
11、根据所有标定阀门位置信息和所有标定气压信息构建曲线算法模型。
12、可选地,根据所有标定阀门位置信息和所有标定气压信息构建曲线算法模型的步骤包括:
13、设定初步曲线模型;
14、根据所有标定阀门位置信息和所有标定气压信息计算初步曲线模型的均方误差;
15、分别基于α、β和γ对均方误差进行求导,并将求导结果为0时对应的α、β和γ代入初步曲线模型,以得到曲线算法模型。
16、可选地,均方误差的计算公式如式(2)所示:
17、 (2);
18、其中,e(α,β,γ)表示均方误差,n表示标定阀门位置信息和标定气压信息的总个数,xi表示第i个标定阀门位置信息,yi表示第i个标定气压信息,f(xi)表示在阀门位置为第i个标定阀门位置信息时初步曲线模型输出的预测气压。
19、可选地,均方误差的求导公式如式(3)所示:
20、 (3);
21、其中,表示基于α对均方误差进行求导的求导结果,表示基于β对均方误差进行求导的求导结果,表示基于γ对均方误差进行求导的求导结果,xi表示第i个标定阀门位置信息,yi表示第i个标定气压信息。
22、可选地,pid控制的pid控制器函数如式(4)所示:
23、 (4);
24、其中,t表示时域,表示当前时刻的pid控制器函数,ki表示积分系数,kp表示比例系数,kd表示微分系数,e(t)表示当前时刻的阀门位置误差,表示当前时刻的阀门位置变化量,表示当前时刻的阀门位置变化量的平方;
25、阀门位置误差的计算公式如式(5)所示:
26、 (5);
27、其中,y(t)表示当前时刻的实际阀门位置信息,yd(t)表示当前时刻的目标阀门位置信息;
28、的计算公式如式(6)所示:
29、 (6);
30、其中,y(t)表示当前时刻的的实际阀门位置信息;
31、如式(7)所示:
32、 (7);
33、其中,y(t-1)表示前一个时刻的实际阀门位置信息,y(t-2)表示前两个时刻的实际阀门位置信息。
34、可选地,真空蝶阀通过步进电机调整阀门的位置,基于pid控制根据实际阀门位置信息和目标阀门位置信息对真空蝶阀的阀门位置进行调整,以使实际阀门位置信息与目标阀门位置信息相同的步骤包括:
35、基于pid控制根据阀门位置信息和目标阀门位置信息对步进电机进行控制,以调整真空蝶阀的阀门位置和使实际阀门位置信息与目标阀门位置信息相同。
36、第二方面,本技术还提供了一种真空蝶阀控制系统,其包括:
37、真空蝶阀,其包括阀门;
38、气压检测组件,设置在腔室内,用于采集腔室内的实际气压信息,腔室与真空蝶阀连接;
39、控制器,与真空蝶阀和气压检测组件电性连接;
40、控制器用于获取腔室内的实际气压信息;
41、控制器还用于基于预先建立的曲线算法模型根据实际气压信息获取对应的实际阀门位置信息,并基于曲线算法模型根据预设的目标气压信息获取对应的目标阀门位置信息,曲线算法模型如式(1)所示:
42、 (1);
43、其中,f(x)表示气压,x表示真空蝶阀的阀门位置,α、β和γ均为常数;
44、基于pid控制根据实际阀门位置信息和目标阀门位置信息对真空蝶阀的阀门位置进行调整,以使实际阀门位置信息与目标阀门位置信息相同。
45、本技术提供的一种真空蝶阀控制系统,先基于曲线算法模型根据实际气压信息和目标气压信息获取实际阀门位置信息和目标阀门位置信息,再基于pid控制根据实际阀门位置信息和目标阀门位置信息对真空蝶阀的阀门位置进行调整,以使实际阀门位置信息与目标阀门位置信息相同,即本技术相当于一种实时获取腔室内的气压并根据该气压自适应调节真空蝶阀的阀门位置的系统,由于本技术的真空蝶阀控制系统能够根据腔室内的气压自适应调节真空蝶阀的阀门位置,而无需通过人工的方式调节真空蝶阀的阀门位置,因此本技术能够有效地提高真空蝶阀的调节精度,而由于本技术能够实时监测腔室内的气压,并在腔室内的气压发生变化时及时调节真空蝶阀的阀门位置,因此本技术还能够有效地提高真空蝶阀的调节效率。
46、第三方面,本技术还提供一种电子设备,包括处理器以及存储器,存储器存储有计算机可读取指令,当计算机可读取指令由处理器执行时,运行如上述第一方面提供的方法中的步骤。
47、第四方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时运行如上述第一方面提供的方法中的步骤。
48、由上可知,本技术提供的一种真空蝶阀控制方法、系统、电子设备及存储介质,先基于曲线算法模型根据实际气压信息和目标气压信息获取实际阀门位置信息和目标阀门位置信息,再基于pid控制根据实际阀门位置信息和目标阀门位置信息对真空蝶阀的阀门位置进行调整,以使实际阀门位置信息与目标阀门位置信息相同,即本技术相当于一种实时获取腔室内的气压并根据该气压自适应调节真空蝶阀的阀门位置的方法,由于本技术的真空蝶阀控制方法能够根据腔室内的气压自适应调节真空蝶阀的阀门位置,而无需通过人工的方式调节真空蝶阀的阀门位置,因此本技术能够有效地提高真空蝶阀的调节精度,而由于本技术能够实时监测腔室内的气压,并在腔室内的气压发生变化时及时调节真空蝶阀的阀门位置,因此本技术还能够有效地提高真空蝶阀的调节效率。
- 还没有人留言评论。精彩留言会获得点赞!