一种无人机用智能飞行控制器防撞系统及方法
本发明属于无人机飞行控制,具体涉及一种无人机用智能飞行控制器防撞系统及方法。
背景技术:
1、近年来,随着无人机技术的不断发展,无人飞行器(unmanned aerial vehicles,uav)已经越来越多地被应用于各个领域,越来越多的机构、个人参与到无人机的研发和使用中来。然而不论执行何种任务,无人飞行器首先要保证飞行过程中的安全。其中无人飞行器对周围障碍物的检测是实现飞行安全的关键。
2、与传统的单个无人机相比,无人机集群能够高效、快速地完成各类复杂任务。目前,无人机集群的研究方向主要是无人机的定位与防撞等,研究内容涉及到环境建模、编队控制系统、航迹规划等。
3、现有技术中,200910306650.8公开了一种无人机飞行防撞方法及装置,其是在无人机上设置机载应答识别系统,机载应答识别系统与无人机上的导航飞行控制系统连接;机载应答识别系统实时发送本机机号和飞行参数,告知地面和其它飞机本机的位置和飞行参数,同时接收其它飞机的机号和飞行参数判断与其它飞机的安全距离,当本机与其它飞机的距离小于安全距离时,机载应答识别系统通过无人机的导航飞行控制系统自动躲避其它飞机。
4、此外,现有技术201710754400.5公开了一种小型固定翼无人机空中防撞系统及防撞方法,包括一种小型固定翼无人机空中防撞系统,包括感知模块和避碰模块;所述感知模块和避碰模块均安装在固定翼无人机上;所述感知模块包括自身状态感知子模块、通信子模块和障碍物感知子模块;所述避碰模块包括碰撞预测子模块和碰撞避免子模块。所述碰撞预测子模块与所述感知模块建立连接,所述碰撞预测子模块生成继续飞行是否会引发碰撞的预测信息,然后将预测信息传输至碰撞避免子模块中,所述碰撞避免子模块根据预测信息调整固定翼无人机的飞行方向和飞行速度。
5、然而,其均不能够根据无人机实时飞行的姿态角速度数据和加速度数据,有效计算无人机与与其协同飞行构成的无人机集群的其他无人机的距离,并根据安全距离阈值对其他无人机发出警报的同时,有效规划目标无人机的飞行路径,进而从多方面防止无人机的碰撞。
技术实现思路
1、本发明针对上述技术问题,提供一种无人机用智能飞行控制器防撞系统及方法。本发明提供的采用四元数法克服了进行姿态解算过程中欧拉角法在角度接近90°时存在奇异性问题,实现全局姿态描述,同时计算简便。
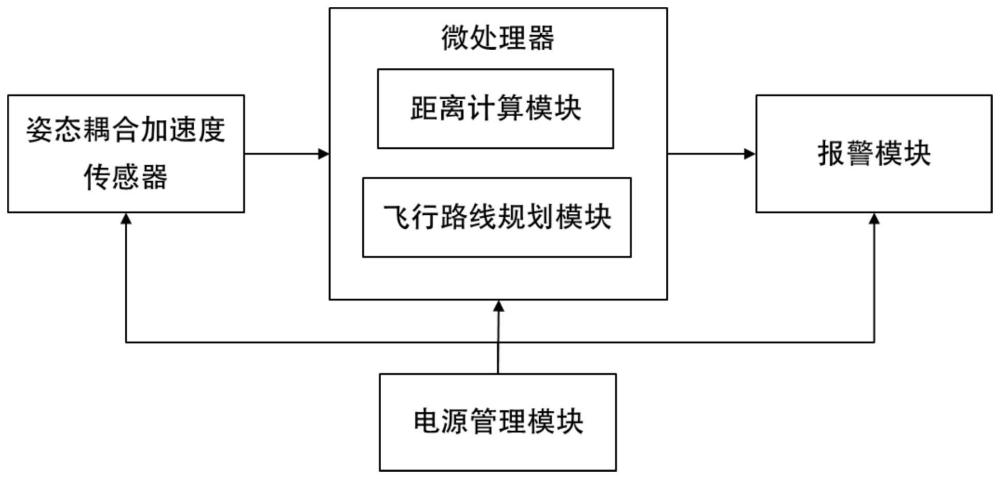
2、本发明提供如下技术方案:一种无人机用智能飞行控制器防撞系统,所述系统包括多个无人机,每个无人机上设置有姿态耦合加速度传感器,所述系统中的每个无人机还包括微处理器、报警模块、电源管理模块,所述微处理器包括距离计算模块、飞行路线规划模块;
3、所述姿态耦合加速度传感器,用于实时采集多个无人机飞行过程中的三维姿态角速度和三维姿态加速度;
4、所述微处理器,用于根据所述距离计算模块的计算结果规划无人机的飞行路线,并对向所述报警模块发出报警指令;
5、所述距离计算模块,用于实时计算目标无人机与其他无人机间的距离;
6、所述飞行路线规划模块,用于实时计算目标无人机的飞行路线;
7、所述报警模块,用于接收所述微处理器的报警指令,对计算结果中距离超过安全距离阈值的其他无人机发出报警;
8、所述电源管理模块,用于为所述系统的正常工作供电。
9、进一步地,所述距离计算模块为毫米波雷达计算模块、红外探测计算模块、uwb射频收发计算模块或激光雷达探测计算模块中的一种。
10、进一步地,所述姿态耦合加速度传感器采用imu惯性测量单元。
11、进一步地,所述imu惯性测量单元采用mma7260、adxl335、lsm6dsrtr或icm-20689中的一种。
12、进一步地,所述微处理器采用stm32f105vct6微型芯片、stm32f072cbt6微型芯片或stm32f302c8t6微型芯片中的一种。
13、进一步地,所述电源管理模块为所述系统供电的电压为+5v。
14、进一步地,所述无人机采用双闭环pid控制系统,所述双闭环pid控制系统采用四元数法融合所述姿态耦合加速度传感器采集到的目标无人机的三维姿态角速度和三维姿态加速度。
15、本发明还提供一种无人机用智能飞行控制器防撞方法,包括以下步骤:
16、步骤1、姿态耦合加速度传感器实时采集多个无人机飞行过程中的三维姿态角速度和三维姿态加速度,并传输至所述微处理器;
17、步骤2、微处理器接收所述姿态耦合加速度传感器采集到的实时数据,并传输至距离计算模块和飞行路线规划模块;
18、步骤3、所述距离计算模块根据所述姿态耦合加速度传感器采集到的实时数据,实时计算目标无人机与其他无人机间的距离,对于与其他无人机超过安全距离阈值的情况,所述微处理器向报警模块发出报警指令;
19、步骤4、所述飞行路线规划模块根据所述姿态耦合加速度传感器采集到的实时数据以及距离计算模块的计算结果,实时计算目标无人机的飞行路线;
20、步骤5、报警模块接收所述微处理器的报警指令,对计算结果中距离超过安全距离阈值的其他无人机发出报警。
21、进一步地,在所述姿态耦合加速度传感器、所述微处理器、所述距离计算模块、所述飞行路线规划模块和所述报警模块在工作过程中,电源管理模块为所述系统的正常工作供电。
22、进一步地,在微处理器明确了当前姿态信息,通过距离计算模块计算的反馈姿态信息给控制系统后,将姿态四元数转化为欧拉角,并且飞行路线规划模块根据距离计算模块计算的反馈姿态信息以及转化得到的欧拉角进一步规划目标无人机的飞行路线。
23、本发明的有益效果为:
24、1、本发明的微处理器采用距离计算模块首先计算目标无人机与其他无人机的距离,根据姿态耦合加速度传感器采集到的数据,采用pid模糊控制算法,融合了三维姿态角速度和三维姿态加速度,进而提高了姿态解算精度。
25、2、本发明提供的系统考虑到现有技术的微处理器在进行姿态解算过程中欧拉角法在角度接近90°时存在有奇异性,并且三角函数运算带来较大计算量,增加微处理器的计算负担,采用四元数法克服了奇异性问题,实现全局姿态描述,同时计算简便。在微处理器明确了当前姿态信息,通过距离计算模块计算的反馈姿态信息给控制系统后,将姿态四元数转化为欧拉角,并且飞行路线规划模块根据距离计算模块计算的反馈姿态信息以及转化得到的欧拉角进一步规划目标无人机的飞行路线,有效提高了飞行路线的精度,防止多个无人机在飞行过程中的碰撞。
26、3、本发明通过距离计算模块计算目标无人机与其他无人机的距离,对于超过安全距离阈值的其他无人机出现时,微处理器向报警模块发出报警指令,报警模块可以有效发出报警信号,防止其他无人机与目标无人机发生碰撞。
27、4、本发明提供的系统采用的无人机飞行姿态数据采集模块采用了姿态耦合加速度传感器,有效地节省了模块数量,进而减少了芯片所需要的面积,使整个系统小巧、便携,引领了高精度、便携式、轻便无人机系统的发展趋势。
- 还没有人留言评论。精彩留言会获得点赞!