一种多电飞机飞行控制系统双余度作动机构控制方法
本发明涉及多电飞机飞行控制,尤其涉及一种多电飞机飞行控制系统双余度作动机构控制方法。
背景技术:
1、多电飞机通过统一规划、管理和集中控制飞机的发电、配电和用电系统,能够显著提高飞机的性能,增强飞机的可靠性和安全性。与传统飞机相比,多电飞机具有更高的能源利用效率、可维护性以及地面支援能力,是未来航空工业的重要发展方向之一。
2、多电飞机采用基于功率电传技术的飞行控制系统,利用电功率驱动飞行控制系统中的作动机构。为了提高机构的可靠性,同时满足系统故障容限需求,飞行控制系统中的作动机构通常需要进行余度设计,即采用多通道作动单元的冗余结构。多余度作动机构的多个通道普遍采用主-备或主-主的驱动方案。对于主-备驱动方案,仅由单个通道驱动作动机构,其他通道作为备份,功重比较小。对于主-主驱动方案,由多个通道同时驱动作动机构,可以有效提升功重比。但由于多通道作动单元的系统不确定性、环境中的负载扰动以及控制方案的设计缺陷,多个通道之间容易产生力纷争。在力纷争状态下,多个通道的作动单元输出力不一致,相互拖拽干扰,影响系统的稳定性和控制精度,加速机构磨损和疲劳,甚至造成作动机构损坏,严重危及飞行安全。
3、针对这一问题,《飞机舵面余度作动系统建模与仿真分析》、《fractional ordermodeling and control of dissimilar redundant actuating system used in largepassenger aircraft》、《force fighting research of dual-redundant hydraulicactuation system》和《双余度电静液作动器力均衡控制》等文献分别对多余度作动机构的动力学建模和控制进行了研究。传统的多余度作动机构普遍采用线性模型,且通常需要设计额外的同步控制器以减小多个通道作动单元的同步误差,进而减轻力纷争。这种分层控制结构可能导致作动机构的动态响应速度降低。而且,作动机构在实际飞行工况下受到的环境扰动包括匹配扰动和非匹配扰动,传统的同步控制器设计方案未能针对不同的扰动特性进行有效处理,这可能导致作动机构的稳态定位精度降低,系统鲁棒性变差。因此,综合考虑作动机构的模型特性以及外部环境负载的特性,集成并优化跟踪和同步控制器设计,对于实现高性能的多通道作动机构控制具有重要意义。此外,展开由机电作动器驱动的多余度作动机构建模和控制方面的研究,对于飞机多电技术向全电技术的进一步发展具有重要意义。
技术实现思路
1、本发明基于多电飞机的飞行控制系统,针对一种具有双通道机电作动器的双余度作动机构,设计了一种多电飞机飞行控制系统双余度作动机构控制方法。本发明同时考虑了双余度作动机构的系统不确定性和环境负载扰动特性,可以有效提高双余度作动机构的动态性能和系统鲁棒性,并降低双通道作动单元的同步误差,从而减轻双通道作动单元之间的力纷争。
2、本发明的技术方案:一种多电飞机飞行控制系统双余度作动机构控制方法,包括如下步骤:
3、步骤1:建立双余度作动机构非线性动力学模型;
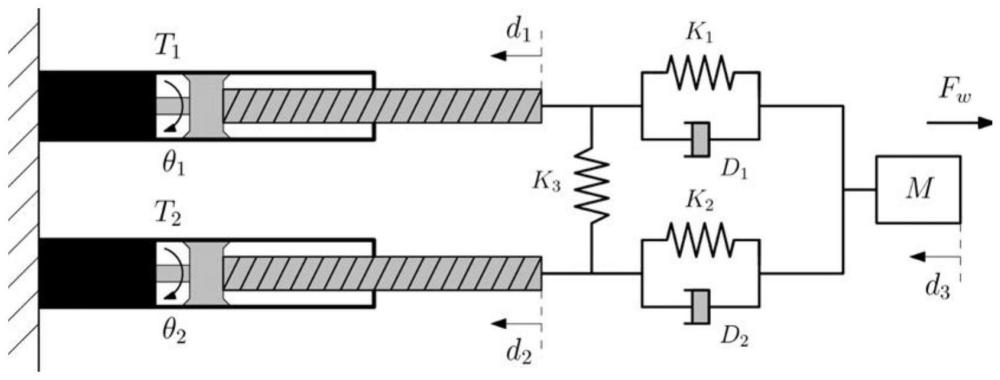
4、两个结构参数相同的机电作动器并联安装,组成双余度作动机构;同时考虑双余度作动机构中机电作动器与载荷之间传动机构的刚度、两个机电作动器之间传动机构的刚度、机构中旋转部件的摩擦转矩以及载荷受到的空气阻力,建立双余度作动机构的非线性动力学方程:
5、
6、其中,t1和t2分别为两个机电作动器中滚珠丝杠的输入转矩;θ1和θ2分别为两个机电作动器中滚珠丝杠的角位移;d为载荷的直线位移;h为传动机构中旋转部件的等效转动惯量;m为载荷质量;l为滚珠丝杠的导程;η为滚珠丝杠的工作效率;k1和k2分别为两个机电作动器与载荷之间传动机构的刚度;k3为两个机电作动器之间传动机构的刚度;为空气阻力,其中θ>0,与空气阻力系数、空气密度和载荷有效迎风面积有关;和分别为两个机电作动器旋转部件的摩擦转矩,其定义如下:
7、
8、其中,i∈{1,2},对于j∈{1,2,3,4,5,6},γj>0;
9、定义状态控制输入扰动对于i∈{1,2,3},对于j∈{1,2},令双余度作动机构的状态空间方程表示为:
10、
11、其中,
12、
13、
14、步骤2:建立鲁棒控制问题;
15、由双余度作动机构的状态空间方程可知,由于g≠h,则扰动w(x)包含非匹配扰动分量;由于双余度作动机构系统的功率限制和空间限制,双余度作动机构系统的控制输入u和扰动w(x)是有界的;令考虑双余度作动机构系统的鲁棒控制问题如下:设计一个双余度作动机构系统的反馈控制器使该系统的状态空间方程在受到扰动的作用下渐进稳定;
16、步骤3:鲁棒控制问题转化;
17、针对步骤2中建立的双余度作动机构系统的鲁棒控制问题,考虑以下受扰动的非线性系统:
18、
19、其中,为受扰动的非线性系统的状态;为受扰动的非线性系统的控制输入,满足且λ>0;为未知有界扰动,并与受扰动的非线性系统的状态相关,且满足w(0)=0;以及为李普希兹连续函数,且满足k(x)≠g(x)及f(0)=0;令ψ(x)=g+(x)k(x)w(x),其中,g+(x)为g(x)的伪逆;存在连续函数满足||w(x)||≤ω(x)且ω(0)=0;存在连续函数满足||ψ(x)||≤ψ(x)且ψ(0)=0;
20、对于具有控制输入约束和未知非匹配扰动的系统(4),通常难以直接设计鲁棒控制器。所以将鲁棒控制问题转化为最优控制问题,存在最优控制问题的解,则其关于控制量us的分量为原鲁棒控制问题的解;
21、令构造受扰动的非线性系统的辅助系统为:
22、
23、其中,为控制输入;in为n阶单位矩阵;令则辅助系统为:
24、
25、其中,m(x)=[g(x) (in-g(x)g+(x))k(x)];
26、定义式(6)的值函数为,
27、
28、其中,
29、
30、其中,ρ>0;π(x)=ρ2ω2(x)是与扰动有关的附加项,满足π(x)≥0且π(0)=0;
31、以下考虑辅助系统(6)的最优控制问题:设计一个反馈控制器使值函数(7)最小;上述最优控制问题有解,并定义最优值函数为,
32、
33、令γ(x,μ)=q(x)+u(μ)+ψ2(x)+π(x);根据贝尔曼最优性原理,最优值函数v*满足哈密顿-雅可比-贝尔曼方程,
34、
35、其中,且
36、定义式(8)的解为其中,u*为最优控制输入,v*为最优辅助控制输入,则u*和v*分别满足和令则有,
37、
38、步骤4:鲁棒自适应动态规划算法;
39、由于哈密顿-雅可比-贝尔曼方程的非线性性质,通常难以求其解析解。采用基于策略迭代的鲁棒自适应动态规划的方法,逼近式(8)的数值解;考虑以下系统,
40、
41、其中,为式(6)的容许控制器;为有界探测噪声,保证式(9)持续激励;对于非负整数序列i,令vi=μ0-μi+ξ;则式(9)表示为,
42、
43、则值函数vi(x)对时间t求导得,
44、
45、取任意时间间隔[r,s]满足0≤r<s,积分式(10),得
46、
47、
48、其中,n为足够大的正整数;对于正整数序列j∈[1,n],为空间上线性无关的基函数序列,表示基函数的权重;定义ci=[ci,1,ci,2,...,ci,n]和φ=[φ1,φ2,...,φn];选择系统状态变量的单项式函数构成基函数,
49、
50、其中,为系统(9)的状态变量,正整数d≥1表示单项式的最高阶数,且将式(12)代入式(11)得,
51、
52、其中,
53、令表示系统(9)在时间间隔[rk,sk]上的k段轨迹;对于k=1,2,...,k,0≤rk<sk,则得k个误差函数,表示为,
54、
55、则基函数的权重系数矩阵c通过求解优化问题进行迭代求解,
56、
57、权重系数矩阵c收敛,通过式(12)求解近似最优值函数的值;令建立以下优化问题,
58、
59、其中,对于i=0,
60、
61、
62、对于i≥1,
63、
64、
65、
66、
67、通过求解优化问题(13),迭代求解权重系数矩阵c,进而逼近辅助系统(6)的最优值函数v*和最优控制器μ*,则系统(4)的鲁棒控制器为
68、本发明的有益效果在于:本发明首先针对由两个结构参数相同的机电作动器驱动的双余度作动机构系统,建立了非线性数学模型。同时考虑系统的非匹配扰动和控制约束,使双余度作动机构系统的建模更加精确,且符合实际工况。为解决该系统的鲁棒控制问题,本发明将其转化为最优控制问题,并利用鲁棒自适应动态规划方法构建了一个优化问题,用于逼近系统的最优值函数,从而求解最优控制输入,减轻了计算负担并提高了控制精度。本发明能够使在双余度作动机构系统在不违反控制约束的前提下实现复位控制。
- 还没有人留言评论。精彩留言会获得点赞!