基于径向基模糊神经网络模糊PID的液压垫控制方法
本发明属于模锻机械和液压控制,具体涉及一种基于径向基模糊神经网络模糊pid的液压垫控制方法。
背景技术:
1、拉伸工艺成型加工是利用模具将平板毛坯成形为开口空心零件的冲压加工方法。拉伸作为主要的冲压工序之一,应用广泛。使用压板装置,利用凸模的冲压力,将平板材的一部分或者全部拉入凹模型腔内,使之成形为带底的容器。容器的侧壁与拉伸方向平行的加工。用拉伸工艺可以制成圆筒形、矩形、阶梯形、球形、锥形、抛物线形及其他不规则形状的薄壁零件。
2、伺服液压垫可完成高精度大深度的拉伸件的生产,大量用于汽车产业。作为汽车生产线的重要组成部分,伺服液压垫的核心控制技术包括预加速速度/压力控制技术和变压边力控制技术。目前,伺服液压垫技术被少数国外企业垄断。
3、现有对伺服液压垫多采用pid控制器对压力进行闭环控制;经典pid控制器有着广泛应用,原因是其有着稳定性好、结构简单等优点。但在传统控制对象中,均为有着精确的数学模型的线性或典型调速系统,但大型的液压系统难以建立数学模型以及电液系统固有的强非线性特性会导致所得到的控制效果往往难以满足控制要求。为了克服电液系统固有的强非线性特性,提高控制性能,在传统pid控制器的基础上引入某种非线性调节机制对其控制参数进行在线调节是一种比较合理的策略,如何有效的实现整个伺服液压垫的多液压缸的高精度速度/压力同步控制是目前需要解决的问题。
技术实现思路
1、本发明主要为了克服现有技术的不足,提供了一种基于径向基模糊神经网络模糊pid的液压垫控制方法。
2、本发明是通过以下技术方案实现的:
3、一种基于径向基模糊神经网络模糊pid的液压垫控制方法,包括以下步骤:
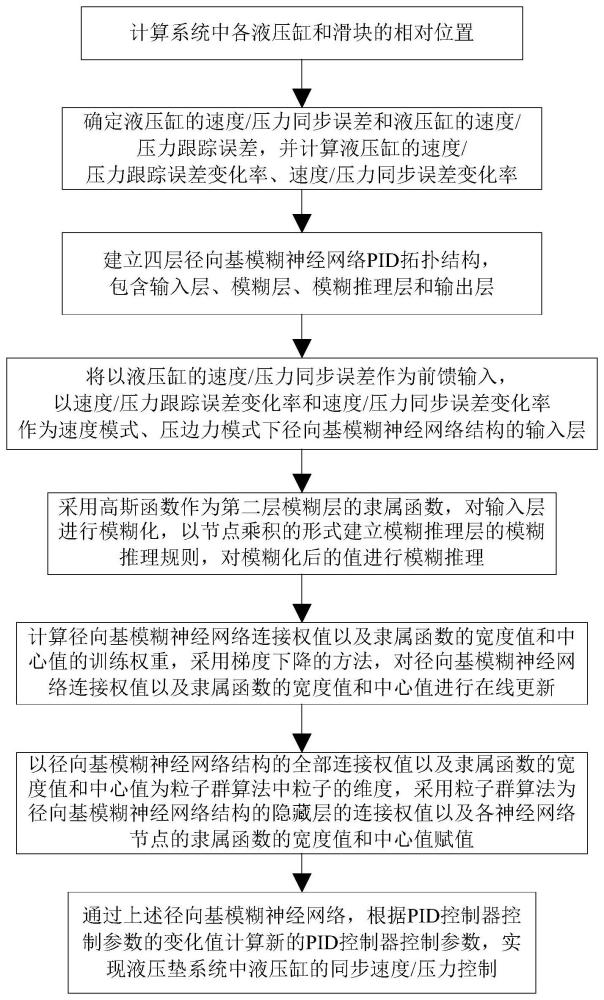
4、步骤1,确定多液压缸系统中的各液压缸的位置以及压力机滑块位置,计算各液压缸和滑块的相对位置,记做li,其中i代表第i个液压缸;在滑块与液压垫接触前设为液压垫速度模式,在接触后设为液压垫压边力模式;
5、步骤2,确定液压缸的速度/压力同步误差和液压缸的速度/压力跟踪误差,并计算液压缸的速度/压力跟踪误差变化率、速度/压力同步误差变化率;
6、步骤3,建立四层径向基模糊神经网络pid拓扑结构,包含输入层、模糊层、模糊推理层和输出层;
7、步骤4,将液压缸的速度/压力同步误差作为前馈输入,以速度/压力跟踪误差变化率和速度/压力同步误差变化率作为速度模式、压边力模式下径向基模糊神经网络结构的输入层;
8、步骤5,采用高斯函数作为第二层模糊层的隶属函数,对输入层进行模糊化,以节点乘积的形式建立模糊推理层的模糊推理规则,对模糊化后的值进行模糊推理,输出kp,ki,kd等参数;
9、步骤6,计算径向基模糊神经网络连接权值以及隶属函数的宽度值和中心值的训练权重,采用梯度下降的方法,对径向基模糊神经网络连接权值以及隶属函数的宽度值和中心值进行在线更新;
10、步骤7,以径向基模糊神经网络结构的全部连接权值以及隶属函数的宽度值和中心值为粒子群算法中粒子的维度,采用粒子群算法为径向基模糊神经网络结构的隐藏层的连接权值以及各神经网络节点的隶属函数的宽度值和中心值赋值;
11、步骤8,通过上述径向基模糊神经网络,根据pid控制器控制参数的变化值计算新的pid控制器控制参数,实现液压垫系统中液压缸的同步速度/压力控制。
12、在上述技术方案中,步骤2中,液压缸的速度跟踪误差的计算公式为:
13、
14、式中,为液压缸i的速度设定输出,为液压缸i的速度实际输出;
15、液压缸的速度同步误差的计算公式为:
16、
17、液压缸的压力跟踪误差的计算公式为:
18、
19、式中,为液压缸i的压力设定输出,为液压缸i的压力实际输出;
20、液压缸的压力同步误差的计算公式为:
21、
22、在上述技术方案中,步骤5中,所述模糊层的隶属函数的表达式为:
23、
24、其中,xi为输入层速度/压力的偏差值和偏差变化率,cij为隶属函数的中心值,bij为隶属函数的宽度值;
25、模糊推理层以乘积的形式使模糊层的各个节点完成模糊规则的匹配,并实现各个节点之间的模糊运算,其表达式为:
26、f3(j,k)=f2(1,j)f2(2,k)
27、输出层为模糊推理层的节点与权值的乘积之和输出kp,ki,kd,其表达式为:
28、
29、
30、
31、其中w为径向基模糊神经网络连接权值。
32、在上述技术方案中,步骤6中,计算径向基模糊神经网络连接权值的训练权重δw,其计算函数为:
33、
34、其中,e是预先定义的损失函数,yout为径向基模糊神经网络pid计算得到的输出值,y为实际负载值,γ是学习率常数。
35、在上述技术方案中,步骤6中,采用梯度下降的方法,对所述连接权值以及隶属函数的宽度值和中心值进行在线整定,其计算函数为:
36、bij(k+1)=bij(k)+δbij(k+1)+α[bij(k)-bij(k-1)]
37、cij(k+1)=cij(k)+δcij(k+1)+α[cij(k)-cij(k-1)]
38、wij(k+1)=wij(k)+δwij(k+1)+α[wij(k)-wij(k-1)]
39、其中α∈[0,1]为动量因子,考虑到上次权值变化对本次权值变化的影响,从而避免权值及隶属函数的宽度值和中心值在学习过程发生振荡、收敛速度慢。
40、在上述技术方案中,步骤7中,在粒子群算法中,粒子的维度d为神经网络的全部连接权值以及隶属函数的宽度和中心值,第i个粒子的位置为xi={xi1,xi2,xi3,...xid}t,根据变量的范围,随机初始化粒子群中粒子的位置xi和速度vi,并确定粒子群规模m;
41、然后,计算个体粒子适应度,将预测输出和期望输出的均方误差之和作为适应度值f,适应度函数表达式为:
42、
43、其中,un为第n个样本控制率的理想输出值,un为第n个样本控制率的实际输出值;通过适应度函数可以算出每个粒子的适应度值。比较粒子个体和群体的适应度值,如果比前一时刻的适应度好,则对粒子最优值和群体最优值进行更新,在每一次迭代中,粒子更新自身的位置和速度,最后,判断当前状态是否满足粒子群算法停止迭代条件,若满足条件则停止迭代,并将最优权值以及隶属函数的宽度和中心值赋给径向基模糊神经网络,否则返回进行下一轮循环。
44、本发明的优点和有益效果为:
45、本发明提供了一种基于径向基模糊神经网络模糊pid的液压垫控制方法,结合径向基模糊神经网络和模糊控制对pid的控制参数进行优化,结合pso算法,对神经网络的输入参数迭代更新,使液压垫系统能快速响应达到预设值,并且超调小、系统稳定,没有出现振荡,具有良好的稳定性和同步性。
- 还没有人留言评论。精彩留言会获得点赞!