静态未知环境下USV基于改进蚁群算法的避碰方法与流程
本发明属于避碰规划,具体涉及一种静态未知环境下usv基于改进蚁群算法的避碰方法。
背景技术:
1、usv作为海上的智能化工具,usv避碰规划既是自动化的重要标识,也是自主航行的核心,所以usv完成任务的前提是其能够智能化避碰。传统避碰规划方法包括蚁群、粒子群、遗传优化算法,人工势场法,深度学习方法等等。其中蚁群算法由于具有较好的路径规划特点被广泛应用在usv避碰规划中,但是传统蚁群算法存在收敛慢,存在使避碰规划陷入局部最优的问题。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是如何提供一种静态未知环境下usv基于改进蚁群算法的避碰方法,以解决。
3、(二)技术方案
4、为了解决上述技术问题,本发明提出一种静态未知环境下usv基于改进蚁群算法的避碰方法,该方法包括如下步骤:
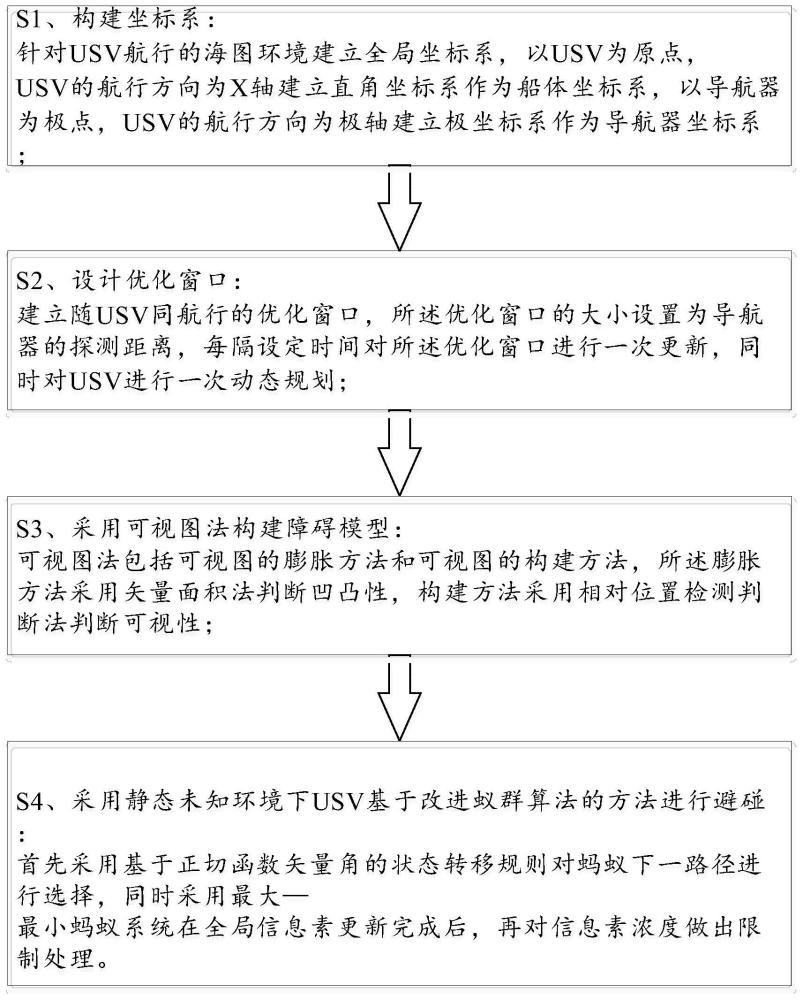
5、s1、构建全局坐标系、船体坐标系和导航器坐标系:
6、针对usv航行的海图环境建立全局坐标系,以usv为原点,usv的航行方向为x轴建立直角坐标系作为船体坐标系,以导航器为极点,usv的航行方向为极轴建立极坐标系作为导航器坐标系;
7、s2、设计实时避碰规划的优化窗口:
8、建立随usv同航行的优化窗口,所述优化窗口的大小设置为导航器的探测距离,每隔设定时间对所述优化窗口进行一次更新,同时对usv进行一次动态规划;
9、s3、采用可视图法构建障碍模型:
10、利用导航器探取障碍的位置,并通过坐标变换将其转化为usv所需的位置信息,从而完成对静态未知环境的探测,进而可采用可视图法对障碍进行建模;
11、可视图法包括可视图的膨胀方法和可视图的构建方法,所述膨胀方法采用矢量面积法判断凹凸性,构建方法采用相对位置检测判断法判断可视性;
12、s4、采用静态未知环境下usv基于改进蚁群算法的方法进行避碰;
13、首先采用基于正切函数矢量角的状态转移规则对蚂蚁下一路径进行选择,同时采用最大—最小蚂蚁系统(max-minant system,mmas)在全局信息素更新完成后,再对信息素浓度做出限制处理。
14、(三)有益效果
15、本发明提出一种静态未知环境下usv基于改进蚁群算法的避碰方法,与现有技术相比,本发明的有益效果在于:通过设计基于正切函数矢量角作为状态转移规则的改进蚁群算法,提高了算法自身的收敛变化速率,增强了算法的实时局部搜索能力,从而增大找到当前最优解的概率,进而克服了传统蚁群算法收敛慢的问题,避免了规划方法陷入局部最优。
技术特征:
1.一种静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,该方法包括如下步骤:
2.如权利要求1所述的静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,所述步骤s1包括:
3.如权利要求2所述的静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,所述步骤s2中,避碰规划时仅对当前滚动窗口中的障碍物进行建模,随着环境窗口的更新,对usv不断地进行动态避碰规划。
4.如权利要求2所述的静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,所述步骤s3中,利用导航器探取障碍的位置包括:
5.如权利要求2所述的静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,所述步骤s3中,坐标变换包括:
6.如权利要求2所述的静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,所述步骤s3中,可视图的膨胀方法包括:
7.如权利要求6所述的静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,所述步骤s3中,可视图的构建方法包括:
8.如权利要求1-7任一项所述的静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,所述步骤s4中,蚁群算法具体包括:
9.如权利要求8所述的静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,所述基于正切函数矢量角的状态转移规则包括:
10.如权利要求8所述的静态未知环境下usv基于改进蚁群算法的避碰方法,其特征在于,所述蚁群算法中,在每次迭代完成全局信息素更新后,采用基于最大-最小蚂蚁系统限制信息素浓度,公式如下所示:
技术总结
本发明涉及一种静态未知环境下USV基于改进蚁群算法的避碰方法,属于避碰规划技术领域。本发明构建全局坐标系、船体坐标系和导航器坐标系,设计实时避碰规划的优化窗口,采用可视图法构建障碍模型,采用静态未知环境下USV基于改进蚁群算法的方法进行避碰。与现有技术相比,本发明的有益效果在于:通过设计基于正切函数矢量角作为状态转移规则的改进蚁群算法,提高了算法自身的收敛变化速率,增强了算法的实时局部搜索能力,从而增大找到当前最优解的概率,进而克服了传统蚁群算法收敛慢的问题,避免了规划方法陷入局部最优。
技术研发人员:郭峰
受保护的技术使用者:天津津航计算技术研究所
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!