无人机最优路径规划脉冲控制方法
本发明涉及无人机控制,具体涉及无人机最优路径规划脉冲控制方法。
背景技术:
1、脉冲控制是一种常见的控制方法,广泛应用于无人机领域,脉冲控制在无人机中广泛应用于航向控制、速度控制、高度控制和避障控制等方面,它能够提供精确的飞行控制能力,使无人机能够在各种条件下完成复杂的任务并保证飞行的准确性和安全性,以实现无人机在各种条件下的高效飞行与控制,从而达到控制无人机飞行的目的;
2、然而,通过在通过运载无人机进行户外运输任务时,通常无人机会穿过一些障碍区域,例如小区区域面,或是商圈区域等,由于障碍区域内通常存在多个建筑物,无法避免无人机与障碍区域内建筑物发生碰撞,确保飞行的安全性通过;基于此,提出一种无人机最优路径规划脉冲控制方法。
技术实现思路
1、本发明的目的在于提供无人机最优路径规划脉冲控制方法,解决了由于障碍区域内通常存在多个建筑物,无法避免无人机与障碍区域内建筑物发生碰撞,确保飞行的安全性通过的技术问题。
2、本发明的目的可以通过以下技术方案实现:
3、无人机最优路径规划脉冲控制方法,包括以下步骤:
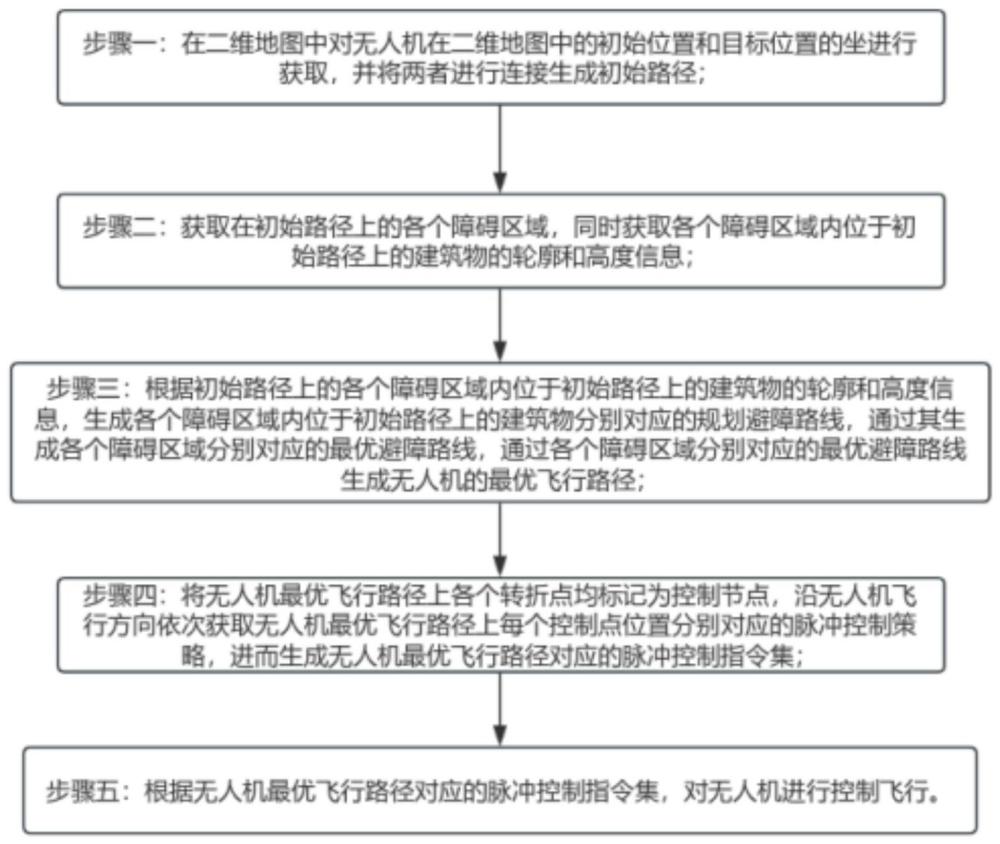
4、步骤一:在二维地图中对无人机在二维地图中的初始位置和目标位置的坐进行获取,并将初始位置和目标位置进行连接生成初始路径;
5、步骤二:获取在初始路径上的各个障碍区域,同时获取各个障碍区域内位于初始路径上的建筑物的轮廓和高度信息;
6、步骤三:根据初始路径上的各个障碍区域内位于初始路径上的建筑物的轮廓和高度信息,生成各个障碍区域内位于初始路径上的建筑物分别对应的规划避障路线,通过其生成各个障碍区域分别对应的最优避障路线,通过各个障碍区域分别对应的最优避障路线生成无人机的最优飞行路径;
7、步骤四:将无人机最优飞行路径上各个转折点均标记为控制节点,沿无人机飞行方向依次获取无人机最优飞行路径上每个控制点位置分别对应的脉冲控制策略,进而生成无人机最优飞行路径对应的脉冲控制指令集;
8、步骤五:根据无人机最优飞行路径对应的脉冲控制指令集,对无人机进行控制飞行。
9、作为本发明进一步的方案:获取各个障碍区域内位于初始路径上的建筑物的轮廓和高度信息的具体方式为:通过优先导入二维地图和遥感数据,来建立建筑物数据库,建筑物数据库中包括各个障碍区域内建筑物的轮廓和高度信息,建筑物的轮廓信息主要指的是建筑物在俯视图中投影到地平面的轮廓图形,建筑物的高度信息主要指的是建筑物高度,即建筑物最高点到地平面的垂直位置高度。
10、作为本发明进一步的方案:生成各个障碍区域内位于初始路径上的建筑物分别对应的规划避障路线:
11、s1:将初始路径沿飞行方向上的第一个障碍区域标记为目标区域,并将二维地图以初始路径为界限分为左右两侧,获取目标区域内位于初始路径上的各个建筑物左右两侧的轮廓,根据各个建筑物分别位于初始路径左右两侧的轮廓图形,生成初始路径左右两侧分别对应的无人机拐点,飞行方向指代为初始路径上从初始位置至目标位置的方向;
12、s2:从二维地图中对目标区域内在初始路径上各个建筑物的建筑物轮廓图形和建筑物高度进行获取,将目标区域内沿飞行方向上位于初始路径上的第一个建筑物作为目标障碍物;
13、s3:获取初始路径在目标障碍物轮廓线进出位置上分别对应的交点坐标,并将其分别标记为b1(bx1,b1 y1)和b2(bx2,b2y2),获取在初始路径上位于目标障碍物轮廓线外距离b1(bx1,b1 y1)和b2(bx2,b2y2)为a1的点的坐标,将其作为目标障碍物对应的起始位置b3(b3xx,b3yy)和结束位置b4(b4xx,b4yy),其中a1为预设的安全距离;
14、s4:获取无人机的飞行高度,并将其标记wg,获取目标障碍物对应的建筑物高度并不将其标记为zg,当目标障碍物高度zg>wg时,则生成绕行指令,当目标障碍物高度zg<wg时,则不生成绕行指令;
15、s41:当生成绕行指令时,获得目标障碍物位于初始路径左右两侧的轮廓图形,并获取目标障碍物位于初始路径左右两侧轮廓线上转折点的位置坐标,并根据各个转折点的位置坐标获取对应无人机的拐点位置;
16、s42:将目标障碍物的起始位置b3(b3xx,b3yy)与目标障碍物位于初始路径左侧的各个拐点位置依次进行连接,进而生成目标障碍物左侧的避障路线,获得目标障碍物左侧避障路线上各个拐点位置中每相邻两个拐点之间的距离之和,然后将其与目标障碍物的起始位置与目标障碍物左侧第一个拐点位置之间的距离进行相加,进而获得目标障碍物左侧避障路线的长度kz1;
17、将目标障碍物的起始位置b3(b3xx,b3yy)与目标障碍物位于初始路径右侧的各个拐点位置依次进行连接,进而生成目标障碍物右侧的避障路线,获得目标障碍物右侧避障路线上各个拐点位置中每相邻两个拐点之间的距离之和,然后将其与目标障碍物的起始位置与目标障碍物右侧第一个拐点位置之间的距离进行相加,进而获得目标障碍物右侧避障路线的长度kr1;
18、s43:当kz1>kr1时,则选取目标障碍物对应的左侧避障路线为目标障碍物的规划避障路线,当kz1<kr1时,则选取目标障碍物对应的右侧避障路线为目标障碍物的规划避障路线,当kz1=kr1时,则在左侧避障路线和右侧避障路线中任选其一作为目标障碍物的规划避障路线,同时将目标障碍物的规划避障路线上的最后一个拐点作为目标障碍物规划避障路线的截止点。
19、作为本发明进一步的方案:当不生成绕行指令时,则将目标障碍物对应的起始位置b3(b3xx,b3yy)和结束位置b4(b4xx,b4yy)进行连接,同时将其作为目标障碍物的规划避障路线,同时将目标障碍物的规划避障路线上的最后一个拐点作为目标障碍物规划避障路线的截止点。
20、作为本发明进一步的方案:在步骤s4进行完成后,实施步骤s5:
21、s5:采用与步骤s4相同的方式对目标区域内的下一个建筑物进行判断,当下一建筑物生成绕行指令时,通过与步骤s3-s4中同样的方式获取下一个建筑物对应的左侧避障路线长度kz2和右侧避障路线长度kr2,同时获取下一个建筑物对应的左侧避障路线和右侧避障路线中第一个拐点分别与目标障碍物的规划避障路线的截止点之间的距离,并将其分别标记为rz1和rr1;
22、当rz2+kz2>rr2+rr1时,则选择下一个建筑物对应的左侧避障路线为下一个建筑物的规划避障路线,当rz2+kz2<rr2+rr1时,则选择下一个建筑物对应的右侧避障路线为下一个建筑物的规划避障路线,当rz2+kz2=rr2+rr1时,则在下一个建筑物对应的左侧避障路线和右侧避障路线中任选其一作为下一个建筑物的规划避障路线,同时将其规划避障路线上的最后一个拐点作为其规划避障路线的截止点。
23、作为本发明进一步的方案:当下一个建筑物没有生成绕行指令时,则通过步骤s3相同方式获取下一个建筑物的起始位置和结束位置,然后将目标障碍物的截止点下一个建筑物的起始位置和结束位置依次连接,进而生成下一个建筑物的规划避障路线,同时将其规划避障路线上的最后一个拐点作为其规划避障路线的截止点。
24、作为本发明进一步的方案:生成各个障碍区域分别对应的最优避障路线的具体方式为:
25、在步骤s5进行完成后,实施步骤s6:重复以上步骤s2-s5,即可对目标区域内各个建筑物分别对应的规划避障路线进行获取,将目标区域内第一个建筑物的起始位置与第一个建筑物的第一个拐点连接后将各个建筑物分别对应的规划避障路线进行依次连接,再将目标区域内最后一个建筑物的规划避障路线的截止点和目标区域内最后一个建筑物对应的结束位置进行依次连接,进而获得目标区域对应的最优避障路线。
26、作为本发明进一步的方案:重复以上步骤s1-s6,即可获取初始路径沿飞行方向上各个障碍区域对应的最优避障路线,将每个障碍区域对应的最优避障路线的第一个拐点与上一个障碍区域最优避障路线进行依次连接,同时将初始路径起点与初始路径上第一个障碍区域的起始位置和其对应的规划避障路线的第一个拐点进行依次连接,将初始路径上最后一个障碍区域对应规划避障路线的截止点与其障碍区域对应的结束位置和初始路径终点进行依次连接,完成所有的连接后即可生成无人机的最优飞行路径。
27、本发明的有益效果:
28、本发明,通过建立二维地图和建筑物数据库,对在初始路径上的各个障碍区域内位于初始路径上的建筑物的轮廓和高度信息的分析,考虑障碍区域内的建筑物轮廓和高度信息,生成无人机的最优飞行路径,可以避免无人机与障碍区域内建筑物发生碰撞,确保飞行的安全性通过;
29、通过获取无人机最优飞行路径上各个控制节点分别对应的脉冲控制策略,进而生成无人机最优飞行路径对应的脉冲控制指令集,使得无人机可以根据最优飞行路径对应的脉冲控制指令集,对无人机进行控制飞行,使得无人机可以在二维地图中找到最优的飞行路径,并避开障碍物,实现安全高效的飞行,可以提高无人机的飞行效率和安全性。
- 还没有人留言评论。精彩留言会获得点赞!