一种飞行器的飞控助手装置及飞行器的控制系统
本技术涉及飞行器的控制,具体涉及一种飞行器的飞控助手装置及飞行器的控制系统。
背景技术:
1、当前市面上涌现了许多自主飞行的飞行器,它们应用于快递物流、农业种植、火灾预警等等场景,节约了人力,提高了工作效率。这些飞行器大多使用针对飞行任务定制的专属飞控;另外,一些特定的飞行应用领域采用的方案为,针对工作场景,直接定制飞控固件达到飞行器自主驾驶的目的;还有一些飞行场景需要针对具体目标和任务对飞控代码改写生成飞控固件。
2、现有的飞行器中,主要由飞控模块和传感器两个部分构成飞控核心单元,传感器包括激光雷达、视觉识别模块等,传感器采集当前飞行器位置等状态信息并传给飞控,飞控接收来遥控器的控制信号,与传感器数据进行融合计算,以pwm信号形式输出至动力部件,如驱动器、电机等。然而,现有技术路线具有许多不足之处。
3、1、定制的专属飞控的功能受限,飞控不具有可移植性,投入较高。
4、2、定制飞控固件的工作要交由专业团队,成本较高,定制的飞控固件适用场景有限,功能单一。
5、3、自定义飞控固件操作对于使用者要求较高,同时由于直接对于飞控代码进行更改移植,破坏了源程序高内聚低耦合特性。
6、4、现有技术在室内场景的使用受限,不易调动多个传感器数据进行融合分析,难以灵活部署。
7、5、标准飞控io外设资源受限,算力紧张,难以挂载多个外设,降低了飞行器性能上限,同时有限的算力也对于编程提出了较高的要求。
技术实现思路
1、本技术为解决定制飞控导致的功能受限问题,为飞行器增加飞控助手并与飞控核心进行控制配合,具体提供一种飞行器的飞控助手装置及飞行器的控制系统。
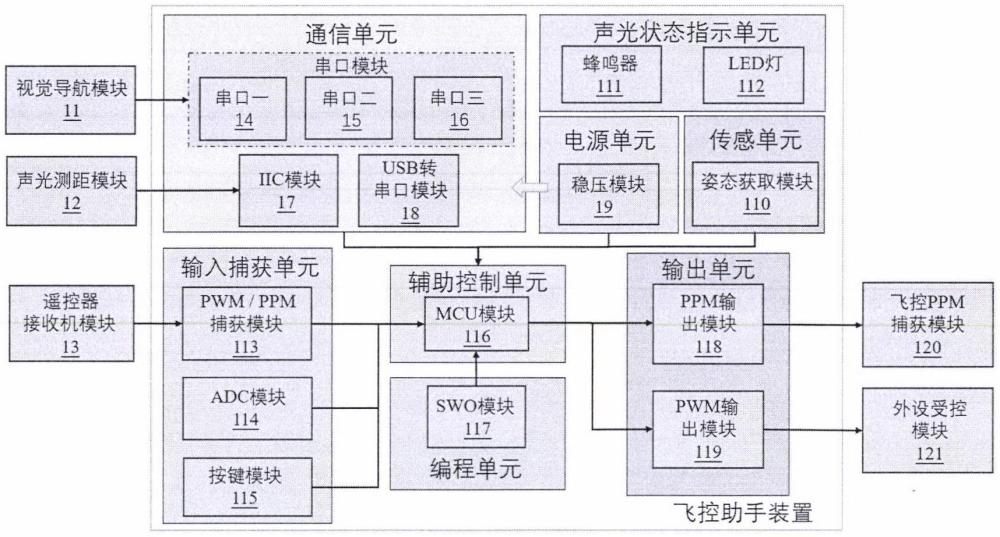
2、根据第一方面,本技术提供一种飞行器的飞控助手装置,包括:
3、通信单元,包括串口模块,iic模块和usb转串口模块中的一者或多者,所述串口模块、所述iic模块、所述usb转串口模块用于分别连接对应接口类型的外设部件;
4、输入捕获单元,包括pwm/ppm捕获模块、adc模块、按键模块中的一者或多者,用于接收并解析遥控输入的控制信号、传感输入的adc信号和按键触发输入的按键信号;所述pwm/ppm捕获模块用于捕获遥控传输到达的控制信号,所述adc模块用于捕获第一类传感器产生的温度和/或气压的模拟信号并将其转换成数字信号,所述按键模块用于捕获按键被触发时产生的按键信号;传感单元,包括姿态获取模块,所述姿态获取模块用于从第二类传感器获取飞行器的速度和/或加速度的状态信息;
5、辅助控制单元,与所述通信单元、所述输入捕获单元、所述传感单元连接,所述辅助控制单元包括mcu模块,所述mcu模块用于对通信获取的数据、输入捕获的信号、传感获取的信息进行融合处理并生成指令信号;
6、输出单元,与所述辅助控制单元相连,包括ppm输出模块和pwm输出模块;所述ppm输出模块用于依据所述指令信号输出ppm信号以控制飞行器的姿态,所述pwm输出模块用于依据所述指令信号控制飞行器搭载的外设受控模块。
7、所述串口模块包括多个串口,每个所述串口与usart接口类型的外设连接,以及基于自定义的usart通信协议进行串口通信,所述usart接口类型的外设部件包括视觉导航模块,所述视觉导航模块是用于获取飞行器的环境识别装置。
8、所述iic模块连接的对应接口类型的外设部件包括声光测距模块,所述声光测距模块用于获取飞行器的环境高度数据。
9、所述的飞行器的飞控助手装置还包括编程单元,所述编程单元具有swo模块,所述swo模块与所述辅助控制单元中的mcu模块连接,用于在接入编程器时通过外界ui对所述mcu模块进行编程处理。
10、所述的飞行器的飞控助手装置还包括电源单元和声光状态指示单元;所述电源单元用于向所述通信单元、所述输入捕获单元、所述辅助控制单元、所述输出单元提供稳定电能,所述电源单元包括稳压模块,所述稳压模块用于输出3.3v和5v的电能等级;所述声光状态指示单元包括蜂鸣器和led灯,用于分别通过发声、闪烁来指示装置工作状态和飞行器飞行状态。
11、所述pwm/ppm捕获模块用于与遥控器接收机模块连接,通过所述遥控器接收机模块接收用户遥控器传来的控制指令并解析为控制信号;所述ppm输出模块用于与飞控ppm捕获模块连接,通过所述飞控ppm捕获模块将ppm信号调制为飞行器的飞控核心装置可接收的信号形式,所述飞控核心装置用于控制飞行器的飞行姿态;所述pwm输出模块用于连接的外设受控模块包括动作执行器,通过所述动作执行器控制飞行器的预定动作。
12、根据本技术的第二方面,本技术提供一种飞行器的控制系统,包括:
13、软件层,包含一体化地面站和/或便携式移动终端,用于实时显示飞行器的飞行姿态数据,所述一体化地面站还用于通过pc对飞行器进行调配参数和/或编写程序,所述便携式移动终端还用于通过app对飞行器进行调配参数;所述调配参数和/或编写程序被用于配置飞行器的初始状态;
14、外设层,包括多个传感器模块,所述传感器模块用于获取飞行器的状态信息或姿态信息,并产生对应的传感数据。
15、控制层,包括飞行器以及集成在飞行器上的飞控助手装置、飞控核心装置;所述飞控助手装置用于通过无线或有线的形式从所述软件层获取调配参数和/或编写程序指令,以及获取所述外设层产生的传感数据并通过融合处理生成指令信号;所述飞控核心装置用于依据所述指令信号控制飞行器的飞行姿态。
16、所述控制层还包括集成于所述飞行器上的遥控器接收模块、动力单元和外设受控模块;所述遥控器接收模块用于通过无线电接收用户遥控器传来的控制指令并解析为控制信号,所述用户遥控器用于产生用户操作飞行器的飞行姿态和飞行动作的控制指令;所述动力单元与所述飞控核心装置连接,用于从所述飞控核心装置获取电信号,通过控制一个或多个电机改变飞行器的飞行姿态;所述外设受控模块与所述飞控助手装置连接,用于从所述飞控助手装置获取电信号,通过控制动作执行器执行飞行器的预定动作。
17、所述外设层被集成于所述飞行器上,包括的多个传感器模块为视觉识别模块、激光雷达模块、光流模块、slam定位模块、gps模块中的任意数量组合。
18、所述一体化地面站包括图形化编程模块、函数生成模块、参数调配模块、wifi发送模块;其中,所述图形化编程模块用于将一个或多个预设的飞行器功能组合并定义函数类型和名称;所述函数生成模块用于将组合的飞行器功能进行打包并生成对应的函数以得到编写程序;所述参数调配模块用于更改、添加或删减程序变量以得到调配参数;所述wifi发送模块用于发送调配参数;
19、所述飞控助手装置包括usb转串口模块、函数文件模块、wifi接收模块和变量赋值模块;其中,所述usb转串口模块用于通过接口转换方式通信连接所述函数生成模块并获取编写程序,所述函数文件模块用于融合或更新编写程序,所述wifi接收模块用于从所述wifi发送模块获取调配参数,所述变量赋值模块用于基于调配参数更改已存储的变量数据。
20、本技术的有益效果是:
21、依上述实施例的采用一种飞行器的飞控助手装置及飞行器的控制系统,飞控助手装置直接对遥控传输到达的控制信号进行拦截和重定义,无需修改飞控核心装置中的程序或重新定制飞控固件,即可实现对于飞行器飞行姿态和位置的控制。由此扩展了飞控核心装置的io外设资源,使飞行器可搭载更多的传感器外设,拓展了飞行器使用场景。同时飞控助手装置搭配了一体化地面站和便捷式移动终端,实现了飞行姿态监测和飞控助手调参的目的,整体功能全面,飞行器编程门槛低。另外,飞控助手装置采用模块化设计,元器件更替简单,软硬件迭代周期短,迭代成本低。
- 还没有人留言评论。精彩留言会获得点赞!