基于群智知识库的无人机仿生集群防碰撞方法
本发明涉及无人机智能、群体防碰撞领域,包括对群智知识库模型的构架和算法的建立,以及在此基础上设计的用于无人机集群过程中无人机个体之间的防碰撞和无人机个体与障碍之间的防碰撞,具体涉及一种基于群智知识库的无人机集群防碰撞方法。
背景技术:
1、从自然界中借鉴动物群体的智慧来解决传统算法所无法应用的情况,是人们在遇到新的难题时常用的方法。在动物群体中,从微生物到昆虫,再到动物,都表现出群体运动的特性。群体中的每个个体都具备独特的特性,众多个体汇聚到一起,则形成了群体的智慧,如鱼群算法、蚁群思想、蝗虫群模型、人群行为类比等,都为群体仿生智能提供了新的思路。
2、可以看出,在自然界物竞天择的环境下,上千年群体的演化体现了在环境中的最优行为策略。种群整体的运动是靠着个体的一致协调所产生的,每个个体根据自身的感知体系,感受到局部信息,个体之间互相防撞,个体联合从而控制群体避障,这种高效的行为效率在快速飞行昆虫群体中体现的尤为突出。richard和pavan等人发现果蝇群体虽然密度大、速度快,但内部个体之间几乎毫无碰撞。他们通过高速相机记录果蝇在狭小空间内部的运动行为,指出果蝇个体之间可以通过某种信息传递群体的密度信息,密度越大,果蝇的防碰撞行为越快。
3、国内研究学者郭爱克院士带领他的团队,对果蝇群体的行为进行了深入的研究。他们在实验室所建立的果蝇三维监控实验系统和果蝇运动行为轨迹可视化系统的基础上,将众多数量的果蝇置于36×36×36cm的透明定域空间内,四周摆置四架脉冲信号控制、拍摄帧率为每秒100帧、分辨率2040×2048的快速相机。通过分析发现,果蝇群体在运动过程中主要包括两种行为:协同捕食和集群防碰撞。对于果蝇群体,这两种行为均满足群体协同的特点,即无中心化或少中心化、群体自治化和个体一致化。
4、(1)协同捕食行为:果蝇群体在发现食物时,群体协同飞向目标区域进行捕食,如腐烂的水果经常能吸引大批果蝇在其上方盘旋,果蝇群体快速交换空间位置来吮吸汁液。若目标为动态,则果蝇以编队协同飞行在目标上空,跟随目标,协同保持群体的构型,进行捕食。
5、(2)集群防撞行为:果蝇群体在遇见障碍物时,会打破自身的队形,快速经过障碍,在经过障碍之后,个体互相之间通过协同,重构形成新的编队。不仅遇见静态障碍,当果蝇遇见动态障碍,也需要打破群体结构,以编队重构的方式完成防碰撞行为。
6、朱立新、张柯等人基于郭爱克院士的实验平台,提出果蝇群体从视觉感知到动作最后执行过程中单个果蝇的防碰撞行为。果蝇群体初始被置于小型定域空间中,果蝇通过自身的视觉以及触觉交互机制感知周围环境,并且感知群体的意图(即群体任务),若群体意向为协同捕食,则果蝇群体形成编队构型,以一定规模飞向食物源;若群体意向为对障碍、天敌等防碰撞,则果蝇群体解散群体,以个体或者小群体越过障碍后,再进行编队重构。无论是协同捕食行为还是集群防撞行为,其生成的策略都要被分解为众多子策略,用来控制子集群或者直接控制单架无人机的行为,最终行为反作用于环境,从而完成任务。在该过程中,果蝇群体通过对协同捕食认知学习和集群防碰撞认知学习,将任务模式记忆于个体中,形成群体智能,使果蝇群体的任务完成度与任务完成时间越来越优化。
7、本发明在果蝇群体防碰撞基础上,进一步考虑有限空间范围内,在无人机编队集群与编队重构过程中,无人机群体外与障碍、群体内无人机个体之间的防碰撞问题,将无人机仿生集群防碰撞以及群体智能知识库构建作为模型基础,提出基于群智知识库的无人机集群防碰撞方法,解决无人机编队集群与编队重构问题。
技术实现思路
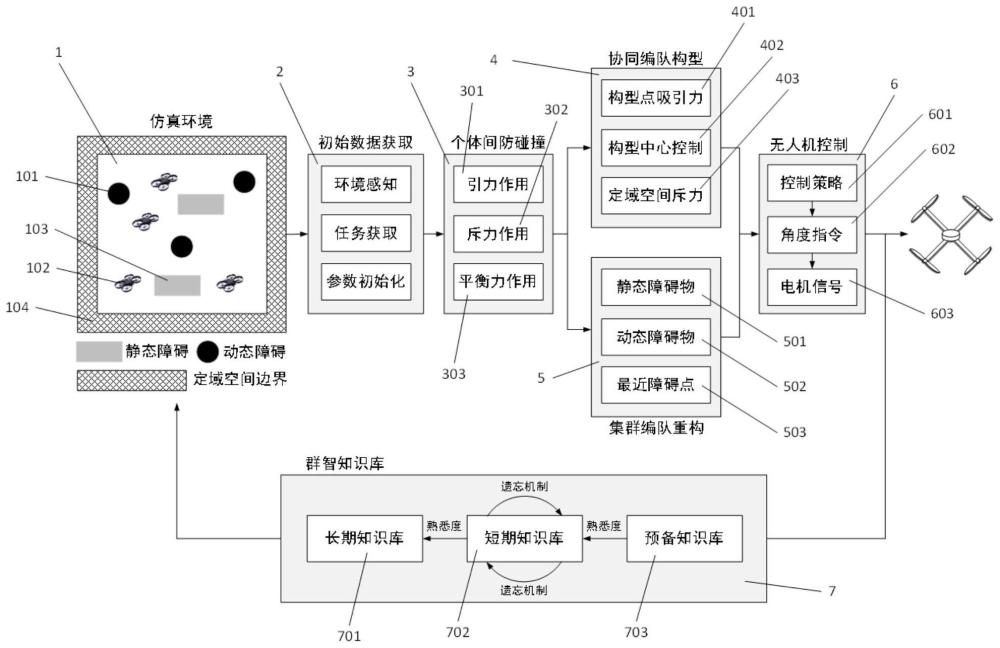
1、为解决无人机集群过程中的编队与重构问题,本发明仿照果蝇群体防碰撞的个体与群体行为,总结出果蝇群体防碰撞生物机理,以此为鉴,提出一种基于群智知识库的无人机仿生集群防碰撞方法,该方法具体包括下列步骤:
2、步骤1:无人机个体间防碰撞;
3、假设无人机互相之间有一种力的作用,保持编队之间的间距,若编队间距过大,则相互靠近;若编队间距过小,则相互远离;为防止无人机在临界点上的震荡引起系统不稳定,加入平衡区域,即两架无人机互相之间的间距处于平衡距离区域内时,认为无人机相互之间不受任何力的影响,保持此间距编队飞行;
4、假设当前有m架无人机执行集群编队任务,取其中第q架和第p架无人机进行分析,其状态分别为:
5、sp=[xp,yp,vp,θp,ap,ψp]t (1)
6、sq=[xq,yq,vq,θq,aq,ψq]t (2)
7、其中,xp、yp、vp、θp、ap、ψp分别表示第p架无人机的横坐标、纵坐标、飞行速度、俯仰角、滚转角以及偏航角;
8、得到两架无人机之间的相对距离矢量和相对速度矢量
9、
10、
11、定义在斥力作用302内,r1表示斥力作用的边界范围距离,无人机之间的相互斥力f1-pq作用为:
12、
13、其中:μ1为斥力系数,为距离的绝对值,λ为的指数因子;
14、对于无人机q来讲,其所受到无人机p的斥力为:
15、
16、对于无人机k来讲,其所受到无人机l的引力作用为:
17、
18、其中:r1、r2分别表示斥力区域作用范围的边界距离与引力区域作用范围的边界距离,μ2表示引力系数;下角标中的2表示无人机相互作用力为引力区域;
19、得到在集群编队中,对于无人机q,其所受到的空间中任意一架无人机p之间的力为:
20、
21、针对有m架无人机的编队任务,无人机q所受到的引力作用301、斥力作用302、平衡力作用的总和为:
22、
23、对于编队中的m架无人机,每架无人机所受到的力既存在吸引力,又存在排斥力,最终使得无人机所受到合力在经过一段时间后,保持平衡状态;
24、步骤2:无人机编队构型防碰撞;
25、假设m架无人机需要形成的协同编队构型为其中(x′1,y′1),(x′2,y′2),...(x′m,y′m)分别表示对应下标的无人机的构型位置的横坐标和纵坐标,每架无人机k,1≤k≤m,都需要能从找到自己的编队位置(x′k,y′k),假设现在无人机的分布为ω=[(x1,y1),(x2,y2),...(xm,ym)],其中(x1,y1),(x2,y2),...(xm,ym)分别表示对应下标的无人机现在所处位置的横坐标和纵坐标,其几何中心为(x0,y0),将无人机编队构型的问题转化为对于每架无人机在飞行过程中找寻对应空间位置的问题;
26、对于无人机任务构型中的每个构型点设计一个虚拟的构型吸引力401,当某个构型点感知到无人机飞行到自身构型点的感知距离之内时,该点处的构型吸引力失效,否则一直吸引游离于编队之外的无人机;假设存在构型点其对现在所处位置(xl,yl)∈ω的无人机所拥有的构型吸引力如式(10)所示;
27、
28、其中:ε为构型吸引力的系数,为构型点(x′k,y′k)与无人机现在所处位置(xl,yl)两者之间的相对距离;
29、由式(10)知,构型吸引力与相互之间的距离呈正相关的关系,无人机与构型点越远,受到的构型力越大;
30、假设当无人机与构型点之间的间距小于设定阈值da,即认为任务到达该点,此时无人机所拥有的虚拟吸引力fak为:
31、if(x′k-xl)2+(y′k-yl)2≤da,fak=0 (11)
32、对于任意的无人机l,其当前位置(xl,yl)∈ω,对于期望构型中的任意构型点存在某构型点(x′k,y′k)对该无人机的吸引力最大;当任意一架无人机到达构型点(x′r,y′r),则设定该构型点的吸引力为0;由此推出无人机l,即uavl所受到的合力为个体间防碰撞的力和构型点的吸引力之和,即由于任意构型点(x′k,y′k)与构型中心点(x′0,y′0)的相对位置是固定的,因此仅需要规划其构型中心的运动轨迹,来控制编队构型的运动;
33、假设定域空间θ为平面中的矩形区域:
34、θ=rectangle[(xdl,ydl),(xur,yur)] (12)
35、其中:rectangle为矩形形成函数,(xdl,ydl)和(xur,yur)分别为矩形的左下顶点和右上顶点所在位置;
36、对于无人机编队构型中心(x′0,y′0),当其到达定域空间边界的阈值内时,定域空间的边界对其产生定域空间斥力403为
37、
38、其中:ξ为边界斥力系数,为相对距离向量,(xe,ye)为边界上距离无人机最近的边界点;
39、步骤3:无人机编队重构防碰撞;
40、无人机编队重构防碰撞分为三个阶段,第一阶段无人机正常根据设计的构型进行飞行,第二阶段感知到障碍物之后构型分解,以单架无人机或者子构型对障碍进行规避,第三阶段在越过障碍之后,继续聚集形成编队;
41、针对第一阶段和第三阶段,均利用无人机编队构型形成的方法进行编队飞行设计;假设m架无人机形成的编队,其中无人机k所感知到n个障碍,对于每个障碍,只要避开障碍中距离无人机最近障碍点503,即能够保证无人机的安全;因此选择距离无人机k最近点作为防碰撞计算点,假设对于障碍中的任意一点(xoq,yoq)∈rn,其中rn表示无人机所感知到的障碍集合,存在某障碍点(xop,yop),使得式(14)成立,则认为该障碍点(xop,yop)为最近障碍点503;
42、dqk≥dpk (14)
43、其中:表示障碍点(xoq,yoq)距离无人机k的距离,表示障碍点(xop,yop)距离无人机k的距离;
44、定义无人机所受到障碍点(xop,yop)对其的反向斥力为:
45、
46、其中:β为障碍物点斥力系数,dmax为无人机所能感知到的最远障碍距离,即障碍点斥力的最大距离;
47、无人机k所受到感知范围内所有障碍点对其的斥力为:
48、
49、其中:1≤i≤n,n为无人机k所感知到的障碍总体数量;
50、在第二阶段,对于任意无人机,其在障碍区域,不执行编队构型,因此不受到构型力的作用,仅受到编队内部无人机个体之间防碰撞的引力与斥力,以及障碍点对其的斥力作用,在针对突发障碍执行防碰撞行为时,作用于无人机k上的合力为:
51、
52、无人机在障碍环境中,不仅要对编队内部的无人机进行防碰撞,也需要对感知到的突发障碍进行防碰撞,这两个力的合力方向即为无人机下一时刻的防碰撞方向;
53、步骤4:无人机群智知识库防碰撞;
54、引入三层群智知识库,在障碍环境不断防碰撞过程中,将预备知识库703中的障碍知识进行增量式学习;积累到一定经验之后,升级为上一级的短期记忆知识库702,为避免数据灾难,在此层引入知识遗忘机制,长时间不调用的知识认为其应用性较少,进行删除;最后在长期记忆知识库701中形成完全可信的防碰撞知识;
55、在完成一次编队飞行防碰撞行为之后,无人机机载计算机中获取到此次任务的知识为:正常飞行时的编队构型ga,障碍模式bq以及防碰撞之后形成的新的重构编队gb,三者之间形成映射关系:
56、
57、其中,map:表示映射关系;
58、预备知识库中将每一次防碰撞任务结束后的三种知识进行记忆,形成知识映射网络;在预备知识库中,对于每一种映射关系map(ga,b,gb),统计其熟悉度ζ如式(19)所示:
59、
60、其中:count(·)为统计函数,旨在记录映射关系发生的频次;count_thresh为门限值;当且仅当该种映射关系熟悉度ζ大于设定的熟悉度阈值ζmax,将该种映射知识进行存储,从预备知识库中升级到短期知识库中,否则仅进行记录,不断熟悉障碍环境;
61、在短期记忆知识库中引入知识遗忘机制;假设短期记忆知识库中存有的映射知识为map(ga,b,gb),在每次执行任务之后,对短期记忆知识库中的知识进行普遍降维:
62、
63、其中:map′(ga,b,gb)为每次执行任务降维后的映射知识,γ为降维系数,nt为累计的防碰撞次数,ξ(·)为布尔变量,当认为此次知识加入到短期记忆知识库中,ξ(·)的值为1,否则为0;
64、当短期记忆知识库中的知识达到一定程度,如式(21)所示,将短期记忆知识库中的知识升级到长期记忆知识库中,作为可信的知识,直接形成映射;
65、
66、其中:ζ2为第二映射关系熟悉度,count_thresh2为第二门限值;
67、无人机在编队重构防碰撞时,首先从长期记忆知识库中寻找是否有与当前障碍环境和编队构型相似的知识,若有相似,则直接调用map(ga,b,gb)执行防碰撞行为;若无相似,则执行常规的防碰撞过程,即步骤一到步骤三的防碰撞过程。
68、与现有技术相比,本发明可以根据先验群智知识库7直接生成降维化的集群防碰撞策略而无需每次根据算法进行冗余运算,通过个体间防碰撞3、协同编队构型4以及集群编队重构5,完成对无先验知识的集群防碰撞策略产生,从而将新的防碰撞知识加入群智知识库7中。能够保证无人机个体之间相互“远吸近斥”,还能防止和环境中的障碍发生碰撞,达到了定域空间中无人机集群防碰撞目的。
- 还没有人留言评论。精彩留言会获得点赞!