大负载电驱动快速垂直起竖系统的制作方法
本发明涉及电机驱动控制,具体地,涉及大负载电驱动快速垂直起竖系统,更为具体地,涉及车载大型导弹发射装置电驱动快速垂直起竖技术,缩短导弹发射的准备时间、加快实时作战速度、提高导弹作战效能等。
背景技术:
1、随着现代空中侦察技术的发展,传统的发射井发射由于位置固定,很容易被敌军发现并摧毁。因此在机动的过程中求生存,已经成为部队作战的共识。对于导弹发射车而言,当目标来袭,具备高速机动和快速起竖回平的能力,以求避免敌方的飞机和卫星的侦察,最大限度的保存自己和打击敌人,缩短导弹发射的作战准备时间已经成为重要的考核指标。
2、起竖系统的结构形式多种多样,从动力来源上说,可分为交流用电和直流用电;从驱动机构上来区分,有液压驱动、机电驱动和电液结合驱动。对追求高效性、稳定性的军工设备而言,如何设计一种适应各种极端环境、反应灵敏、起竖精度高、后期维护保养方便的起竖系统就显得尤为重要。对于大负载起竖控制系统,国内外目前采用液压驱动作为动力源居多,具有功率大、结构简单等优点,但是也存在能量损失大、对温度变化较为敏感、油液易泄露、维修保养麻烦等问题。长时间工作后还容易出现“跑”、“冒”、“滴”、“漏”等质量问题。随着电子科学技术的发展,机电式驱动由于其良好的可维护性、数学解算能力等,越来越多的科研院所及相关单位开始研究并应用基于机电式的起竖控制系统。
3、专利文献cn114545779a(申请号:202210227181.6)公开了一种基于直驱泵的快速起竖系统自调节积分鲁棒控制方法,以伺服液压泵直接驱动起竖系统的动作,调节伺服电机的转速直接控制液压泵输出流量,并融合了自适应控制的思想,使得起竖过程的跟踪精度满足更高的要求。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种大负载电驱动快速垂直起竖系统。
2、根据本发明提供的一种大负载电驱动快速垂直起竖系统,包括:
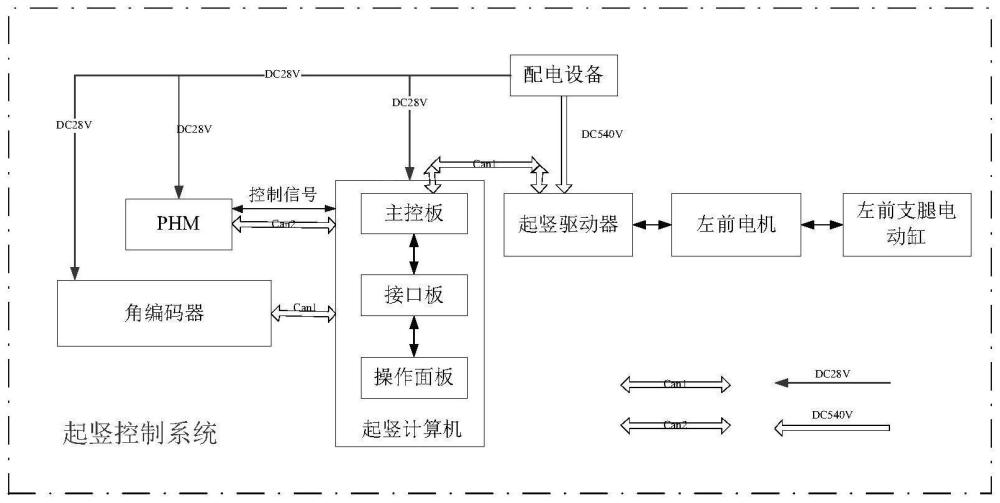
3、模块m1:核心起竖控制计算机接收起竖、回平控制指令,并将接收到的起竖、回平控制指令转化为转速控制指令,将当前转速控制指令发送至驱动器;
4、模块m2:驱动器根据接收到的转速控制指令形成驱动电机的电压,基于驱动电机的电压控制电机转动并作用于发射架,在满足预设要求的控制末端,对驱动器进行切电流环控制,将电流的力矩作用于发射架,从而实现发射架的起竖或回平;
5、模块m3:在上电启动时,由核心起竖控制计算机发送测角装置启动命令,测角装置收到启动命令后,按照周期输出发射架实际角度,并发送至核心起竖控制计算机,最终形成闭环控制。
6、优选地,还包括制动电阻,所述制动电阻用以消耗在电机制动时产生的反向电压。
7、优选地,所述电机将旋变信号返回给驱动器,驱动器进行解析后得到电机的转速和位置信息,并与转速控制量形成闭环控制;
8、所述电机采用三相交流永磁同步电机,用于给起竖控制系统提供动力力矩。
9、优选地,驱动器基于驱动电机的电压通过pwm控制输出变频交流电,对电机的转速进行控制。
10、优选地,通过can总线进行数据交互;
11、包括:传感器信号的采集,包括测角装置和接近开关信号采集;基于采集的接近开关信号检测起竖或回平是否到位;基于采集到的测角装置发射架的实际角度,获取相应的分段转速,实现闭环控制;
12、还包括:通过can总线反馈驱动器及电机的状态信息给核心起竖控制计算机;所述状态信息包括:电流值、电机编码器圈数、电机转速以及故障信号;核心起竖控制计算机基于获取的状态信息解析判断故障类型。
13、优选地,所述测角装置采用绝对式角编码器,测量的角度范围为0~360°,精度在0.001度;
14、所述绝对式角编码器安装在所述发射架的转动轴上,用来测量并反馈发射架的角度;
15、当测角装置测量得到的数值在阈值范围内,同时检测接近开关,当接近开关被触发,则认为当前发射架起竖到位或者回平到位,开始触发执行插销子动作。
16、优选地,若驱动器和/或电机出现故障后,会通过硬件信号发送至核心起竖控制计算机;在收到故障信号后,核心起竖控制计算机对驱动系统发送断使能命令,电机停止转动;同时,核心起竖控制计算机通过can总线反馈的驱动器及电机的状态信息解析判断故障类型,并在显示屏上进行显示;
17、其中,故障类型包括:过流、过压、旋变故障、电机失速。
18、优选地,到位的判断标准在定时器的范围内检测;若在规定的时间内,销子的锁定接近开关检测到到位,则起竖或者回平流程结束,起竖驱动器断使能;若在规定的时间内,销子并未触发接近开关,则上报销子动作超时故障。
19、优选地,电机转速从0加速到额定转速的时间控制在驱动器内部进行,驱动器在收到转速控制指令后,根据设置好的斜率进行插值控制,从而电机带动电动缸进行动作;其中,在起竖回平阶段,进行转速控制的时候,需要对加减速的角度值进行测试,在划分角度值时,设置一定的余量。
20、优选地,发射架采用转速分段控制实现起竖或回平;
21、在起竖阶段,分段转速控制采用:
22、
23、在回平阶段,分段转速控制采用:
24、
25、其中,α表示发射架的实际角度。
26、与现有技术相比,本发明具有如下的有益效果:
27、1、本发明通过机电式数字化驱动的控制方式,实现了大负载机电式起竖控制,避免了因使用液压驱动带来得一系列“跑”、“冒”、“滴”、“漏”等质量问题;
28、2、本发明起竖时间短、维护性好,可适应高低温、盐雾、霉菌等各种极端环境,不仅可以用在导弹发射车上,对其他的装备平台或者民用设备上都有应用价值,具备通用性;
29、3、本发明在导弹发射车发射架起竖回平动作的最后阶段,采用开环切换转矩的模式方式进行控制,可避免传统由于角编码器漂移、发射架变形带了的角度数据误差不准的问题;
30、4、对于到位的检测,采用一段时间内多次滤波的控制方式,可避免接近开关受到电磁干扰造成的误判。
技术特征:
1.一种大负载电驱动快速垂直起竖系统,其特征在于,包括:
2.根据权利要求1所述的大负载电驱动快速垂直起竖系统,其特征在于,还包括制动电阻,所述制动电阻用以消耗在电机制动时产生的反向电压。
3.根据权利要求1所述的大负载电驱动快速垂直起竖系统,其特征在于,所述电机将旋变信号返回给驱动器,驱动器进行解析后得到电机的转速和位置信息,并与转速控制量形成闭环控制;
4.根据权利要求1所述的大负载电驱动快速垂直起竖系统,其特征在于,驱动器基于驱动电机的电压通过pwm控制输出变频交流电,对电机的转速进行控制。
5.根据权利要求1所述的大负载电驱动快速垂直起竖系统,其特征在于,通过can总线进行数据交互;
6.根据权利要求1所述的大负载电驱动快速垂直起竖系统,其特征在于,所述测角装置采用绝对式角编码器,测量的角度范围为0~360°,精度在0.001度;
7.根据权利要求1所述的大负载电驱动快速垂直起竖系统,其特征在于,若驱动器和/或电机出现故障后,会通过硬件信号发送至核心起竖控制计算机;在收到故障信号后,核心起竖控制计算机对驱动系统发送断使能命令,电机停止转动;同时,核心起竖控制计算机通过can总线反馈的驱动器及电机的状态信息解析判断故障类型,并在显示屏上进行显示;
8.根据权利要求1所述的大负载电驱动快速垂直起竖系统,其特征在于,到位的判断标准在定时器的范围内检测;若在规定的时间内,销子的锁定接近开关检测到到位,则起竖或者回平流程结束,起竖驱动器断使能;若在规定的时间内,销子并未触发接近开关,则上报销子动作超时故障。
9.根据权利要求1所述的大负载电驱动快速垂直起竖系统,其特征在于,电机转速从0加速到额定转速的时间控制在驱动器内部进行,驱动器在收到转速控制指令后,根据设置好的斜率进行插值控制,从而电机带动电动缸进行动作;其中,在起竖回平阶段,进行转速控制的时候,需要对加减速的角度值进行测试,在划分角度值时,设置一定的余量。
10.根据权利要求1所述的大负载电驱动快速垂直起竖系统,其特征在于,发射架采用转速分段控制实现起竖或回平;
技术总结
本发明提供了一种大负载电驱动快速垂直起竖系统,包括:模块M1:核心起竖控制计算机接收起竖、回平控制指令,并将接收到的起竖、回平控制指令转化为转速控制指令,将当前转速控制指令发送至驱动器;模块M2:驱动器根据接收到的转速控制指令形成驱动电机的电压,基于驱动电机的电压控制电机转动并作用于发射架,发射架实现起竖或回平;模块M3:在上电启动时,由核心起竖控制计算机发送测角装置启动命令,测角装置收到启动命令后,按照周期输出发射架实际角度,并发送至核心起竖控制计算机,最终形成闭环控制。
技术研发人员:牛远征,宋波涛,郑晟,葛杨,乔金鑫,洪林,周元春,王惠娟,殷翔,赵文俊
受保护的技术使用者:上海机电工程研究所
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!