一种具有电子围栏应急系统的水下机器人的制作方法
本发明涉及水下机器人,尤其是涉及一种具有电子围栏应急系统的水下机器人。
背景技术:
1、水下机器人作为探索海洋的重要利器,受到了全世界的广泛关注。水下机器人在探索水下世界的同时也面临的巨大危险与挑战。水下机器人功能的丰富性、设备的稳定性以及安全性影响着自身完成任务的效果,甚至决定其是否会丢失。现在水下机器人的各个部件都可能出现问题,导致其偏离航线而无法返航,这大大影响水下机器人的安全性。同时,由于水下环境的复杂性和不确定性,水下机器人在执行任务时可能面临一些潜在的风险,例如碰撞、损坏等。因此,为了保护水下机器人的安全和提高任务执行效率,研发一种具有电子围栏应急系统的水下机器人是非常有必要的。
技术实现思路
1、本发明的目的是提供一种具有电子围栏应急系统的水下机器人,能够有效限制水下机器人的作业范围,大大提高水下机器人的安全性。
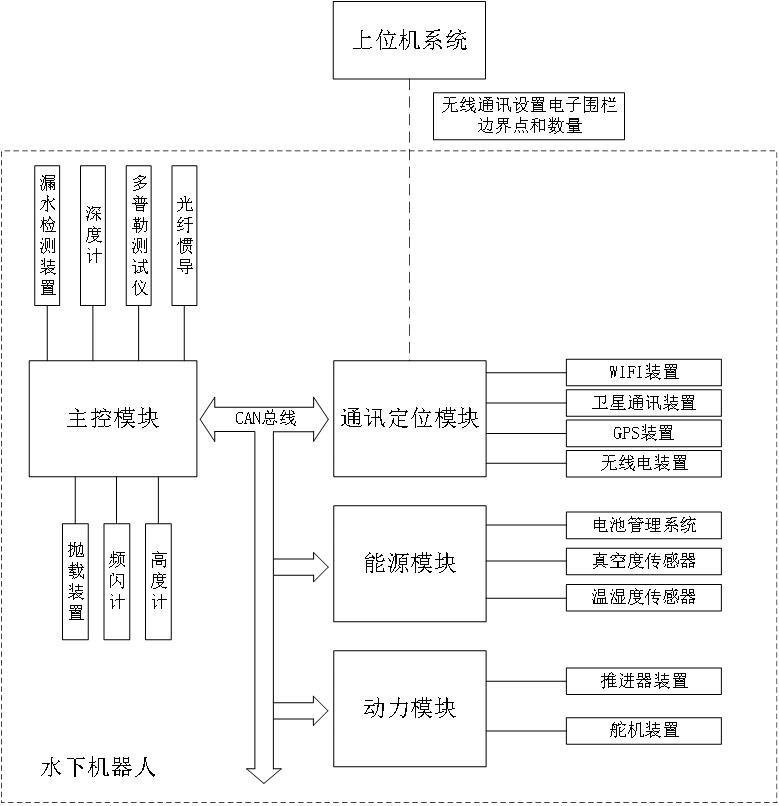
2、为实现上述目的,一种具有电子围栏应急系统的水下机器人,包括上位机系统和设置于水下机器人中的主控模块、通讯定位模块、能源模块、动力模块,上位机系统与通讯定位模块无线交互,主控模块与通讯定位模块、能源模块、动力模块分别通过can总线相连接,主控模块中设置有电子围栏应急系统,上位机系统通过无线通讯设置电子围栏的边界点和数量,电子围栏边界点按顺时针或逆时针排列,电子围栏应急系统用于判断水下机器人是否位于电子围栏中,具体步骤如下:
3、步骤1:首先建立坐标系,以地球经纬度的原点为坐标系原点,以东西经度数为x坐标取值,其中东经度数为正,西经度数为负;以南北纬度数为y坐标取值,其中北纬度数为正,南纬度数为负;
4、取得当前值:水下机器人的坐标,,电子围栏边界点的个数 n,,电子边界点的坐标;
5、步骤2:取变量,交点数;
6、步骤3:判断是否,如果是,则继续执行步骤4,如果否,则跳转到步骤9;
7、步骤4:判断是否在边上,如果是,则赋值交点数p=1,跳转到步骤9;如果否,则继续执行步骤5;
8、步骤5:假设由点向虚拟点发出一条水平射线,或,该水平射线与x轴平行,判断该水平射线与边是否有交点,如果是,则继续执行步骤6;如果否,则跳转到步骤8;
9、步骤6:判断由发出的水平射线与边是否相交在顶点上,如果是,则继续执行步骤7;如果否,则交点数并跳转到步骤8;
10、步骤7:判断和是否分布在水平射线的两侧,时,取;时,取0,如果是,则交点数并跳转到步骤8;如果否,直接执行步骤8;
11、步骤8:进行操作,然后跳转到步骤3;
12、步骤9:判断交点数p是否为奇数,如果是,则判定水下机器人位置在电子围栏内;如果否,则判定水下机器人不在电子围栏内,水下机器人停止动力模块的运行,紧急上浮,上浮后通过卫星通讯装置发送位置,等待救援或者新的指令。
13、优选的,步骤4中,判断是否在边上的方法为:
14、计算点与边所在直线的斜率公式是否拟合,拟合且满足,,则判定点在边上,否则不在。
15、优选的,步骤5中,判断由点向虚拟点发出的水平射线与边是否有交点的方法为:
16、步骤5.1:如果和中较大的数小于和中较小的数,则两条线没有交点,否则继续步骤5.2;
17、步骤5.2:如果小于和中较小的数,则两条线没有交点,否则继续步骤5.3;
18、步骤5.3:如果和中较大的数小于和中较小的数,则两条线没有交点,否则继续步骤5.4;
19、步骤5.4:如果和中较大的数小于,则两条线没有交点,否则继续步骤5.5;
20、步骤5.5:如果向量与的叉积和向量与的叉积结果异号,即:表明点和点没有分布在向量的两侧,即两条线没有交点,否则继续步骤5.6;
21、步骤5.6:如果向量与的叉积和向量与的叉积结果异号,即:则表明点和没有分布在的两侧,即两条线没有交点,否则有交点。
22、优选的,步骤6中,判断由发出的水平射线与边是否相交在顶点上的方法为:
23、时,如果点满足且,或满足且时,则相交在顶点上,不满足时不与顶点相交;
24、时,如果点满足 且,或满足且时,则相交在顶点上,不满足时不与顶点相交。
25、优选的,步骤7中,判断和是否分布在水平射线的两侧的方法为:如果满足和,则和分布在水平射线的两侧,否则不分布在两侧。
26、优选的,主控模块包括:
27、自动驾驶单元,用于控制水下机器人完成航行任务;
28、传感器数据处理单元,用于接收传感器信息;
29、应急单元,内置电子围栏应急系统;
30、航行数据储存单元,进行航行信息的储存;
31、数据交互单元,进行模块间的数据交互。
32、优选的,主控模块与光纤惯导、多普勒测试仪、深度计、漏水检测装置、抛载装置、频闪灯、高度计相连接,光纤惯导和多普勒测试仪组合为水下机器人提供水下位置信息,深度计为水下机器人提供深度信息。
33、优选的,通讯定位模块与wifi装置、卫星通讯装置、gps装置、无线电装置相连接,wifi装置用于提取水下机器人的内部任务数据;卫星通讯装置用于维持水下机器人的水面通讯;gps装置为水下机器人提供水面位置信息;无线电装置用于水下机器人的短距离控制。
34、优选的,能源模块与电池管理系统、真空度传感器、温湿度传感器相连接,动力模块与推进器装置、舵机装置相连接。
35、因此,本发明采用上述结构的一种具有电子围栏应急系统的水下机器人,通过设置一定的电子围栏范围,监测水下机器人的位置和运动状态,并及时检测可能的碰撞风险。一旦水下机器人接近电子围栏范围边界,系统会及时发出警报,提醒操作人员采取行动,避免潜在的事故发生,可有效的降低由于水下机器人偏离航线而产生安全威胁甚至丢失的可能。水下机器人上浮后通过卫星通讯联系岸基控制台,为后续救援提供保障。
36、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种具有电子围栏应急系统的水下机器人,包括上位机系统和设置于水下机器人中的主控模块、通讯定位模块、能源模块、动力模块,上位机系统与通讯定位模块无线交互,主控模块与通讯定位模块、能源模块、动力模块分别通过can总线相连接,其特征在于:主控模块中设置有电子围栏应急系统,上位机系统通过无线通讯设置电子围栏的边界点和数量,电子围栏边界点按顺时针或逆时针排列,电子围栏应急系统用于判断水下机器人是否位于电子围栏中,具体步骤如下:
2.根据权利要求1所述的一种具有电子围栏应急系统的水下机器人,其特征在于:步骤4中,判断是否在边上的方法为:
3.根据权利要求1所述的一种具有电子围栏应急系统的水下机器人,其特征在于:步骤5中,判断由点向虚拟点发出的水平射线与边是否有交点的方法为:
4.根据权利要求1所述的一种具有电子围栏应急系统的水下机器人,其特征在于:步骤6中,判断由发出的水平射线与边是否相交在顶点上的方法为:
5.根据权利要求1所述的一种具有电子围栏应急系统的水下机器人,其特征在于:步骤7中,判断和是否分布在水平射线的两侧的方法为:如果满足和,则和分布在水平射线的两侧,否则不分布在两侧。
6.根据权利要求1所述的一种具有电子围栏应急系统的水下机器人,其特征在于:主控模块包括:
7.根据权利要求6所述的一种具有电子围栏应急系统的水下机器人,其特征在于:主控模块与光纤惯导、多普勒测试仪、深度计、漏水检测装置、抛载装置、频闪灯、高度计相连接,光纤惯导和多普勒测试仪组合为水下机器人提供水下位置信息,深度计为水下机器人提供深度信息。
8.根据权利要求7所述的一种具有电子围栏应急系统的水下机器人,其特征在于:通讯定位模块与 wifi 装置、卫星通讯装置、gps装置、无线电装置相连接,wifi装置用于提取水下机器人的内部任务数据;卫星通讯装置用于维持水下机器人的水面通讯;gps装置为水下机器人提供水面位置信息;无线电装置用于水下机器人的短距离控制。
9.根据权利要求8所述的一种具有电子围栏应急系统的水下机器人,其特征在于:能源模块与电池管理系统、真空度传感器、温湿度传感器相连接,动力模块与推进器装置、舵机装置相连接。
技术总结
本发明公开了一种具有电子围栏应急系统的水下机器人,涉及水下机器人领域,包括上位机系统和设置于水下机器人中的主控模块、通讯定位模块、能源模块、动力模块,上位机系统与通讯定位模块无线交互,主控模块与通讯定位模块、能源模块、动力模块分别通过CAN总线相连接,主控模块包括自动驾驶单元、传感器数据处理单元、应急单元、航行数据储存单元和数据交互单元,应急单元内置电子围栏应急系统,电子围栏应急系统用于判断水下机器人是否位于电子围栏中。本发明采用上述结构的一种具有电子围栏应急系统的水下机器人,可以有效的降低由于水下机器人偏离航线而产生安全威胁甚至丢失的可能。
技术研发人员:陈凯,忻加成,赵基伟,张彬,田奇睿,王晓鸣,王东
受保护的技术使用者:天津瀚海蓝帆海洋科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!