一种车路云一体化的联合仿真系统、方法、设备及介质与流程
本发明涉及交通仿真,具体涉及一种车路云一体化的联合仿真系统、方法、设备及介质。
背景技术:
1、现代交通系统是复杂巨系统,人、车、路、环境、信息等系统构成要素相互关联、高度耦合,边界开放,众多问题难以通过现场观测和理论建模进行分析,但虚拟仿真技术为分析和解决复杂交通问题提供了有效的工具和手段。道路交通系统正在经历全新变革,呈现智能化、网联化、协同化的趋势,车路云一体化技术成为国际智能交通研究和实践的热点与前沿,仿真测试成为工业界和学术界进行科技攻关的重要手段。
2、目前,国内外进行交通仿真的软件很多,然而在满足自动驾驶仿真需求方面,仍存在诸多不足,主要体现在以下几个方面。首先,针对自动驾驶仿真技术存在两种模式,一种是一体化仿真,另一种是联合仿真。一体化仿真是指巨头企业利用资金实力(自研或并购)打通产业链,形成尽量独立且全面的仿真能力;联合仿真则是不同仿真企业之间紧密合作,通过产品对接,联合实现仿真任务。由于汽车和交通仿真的复杂性,单靠一种仿真工具难以直接满足车路云一体化环境下交通仿真的需求,难以实现算法生成与接入、实时交通信息的提取以及车辆速度路径的控制等,不同架构的模型难以有效地协同工作或进行数据交换,导致信息难以共享。
技术实现思路
1、有鉴于此,本发明提供了一种车路云一体化的联合仿真系统、方法、设备及介质,以解决如何提高交通仿真测试的效率的问题。
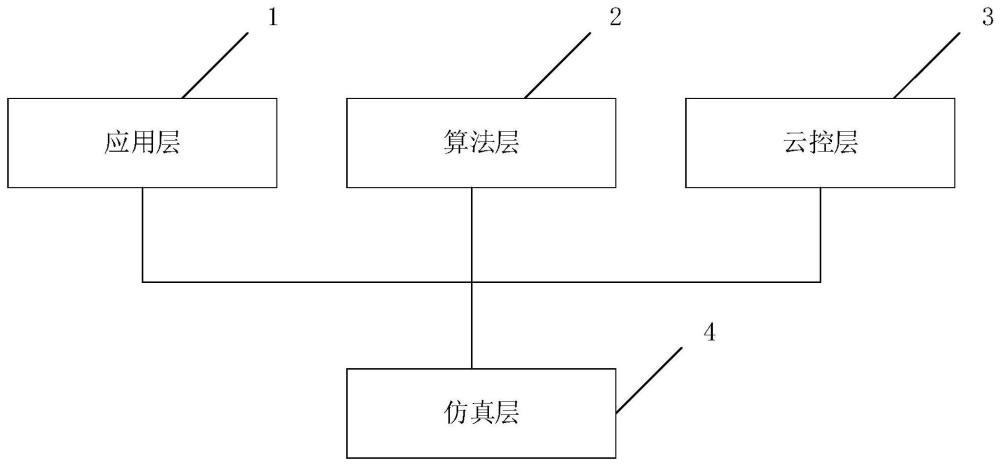
2、第一方面,本发明实施例提供了一种车路云一体化的联合仿真系统,系统包括:应用层、算法层、云控层以及仿真层;
3、所述应用层,用于基于实际道路以及实际场景生成道路模型数据以及场景模型数据,并将所述道路模型数据以及场景模型数据导入仿真层;
4、所述算法层,包括多个自动驾驶算法,用于基于第一接口实时获取仿真层的车辆参数;基于所述车辆参数利用自动驾驶算法生成第一控制指令;基于第一接口将所述第一控制指令传输至仿真层;
5、所述云控层,包括多个交通仿真策略,用于基于第二接口实时获取仿真层的策略参数;基于所述策略参数利用交通仿真策略生成第二控制指令;基于第二接口将所述第二控制指令传输至仿真层;
6、所述仿真层,用于基于道路模型数据、场景模型数据以及预设的初始车辆参数和初始策略参数进行车路云模型的初始化操作,并基于初始化的车路云模型执行车路云模型仿真测试;在车路云模型仿真测试过程中基于第一控制指令以及第二控制指令实时更新车路云模型,并基于更新后的车路云模型继续执行车路云模型仿真测试;将所述车路云仿真测试过程中实时产生的车辆参数传输至算法层,将所述车路云仿真测试中实时产生的策略参数传输至云控层;其中,所述车辆参数表征仿真层在仿真测试过程中每辆车的自身状态参数;所述策略参数表征仿真层在仿真测试过程中交通流的控制策略参数。
7、本发明实施例提供的系统在应用层根据实际道路场景生成道路模型数据以及场景模型数据,并将其导入仿真层的vissim仿真软件,能够基于真实道路情况进行准确的仿真,反映真实交通情况,包括道路状况、车辆位置和速度等;算法层通过第一接口实时获取仿真层的车辆参数,并利用自动驾驶算法生成第一控制指令,能够允许自动驾驶车辆根据实际交通情况做出即时的决策,从而提高道路安全和交通效率;云控层通过第二接口实时获取仿真层的策略参数,并利用交通仿真策略生成第二控制指令,系统能够实时监测和调整交通流的控制策略、在仿真中测试不同的交通策略,从而改善交通流动性,减少拥堵和交通事故;仿真层将实时产生的车辆参数传输至算法层,将实时产生的策略参数传输至云控层,以使算法层和云控层能够根据仿真结果进行实时的反馈和调整,以优化自动驾驶算法和交通仿真策略,从而提高系统的性能和效果;本发明提供的系统使用仿真层仿真可以减少在实际道路上进行测试的成本和风险,同时还允许在不同条件下进行大规模测试,以加速自动驾驶系统的开发。
8、在一种可选的实施方式中,所述自动驾驶算法,至少包括感知算法、定位和地图算法、路径规划和决策算法、控制算法、通信和联网算法;所述交通仿真策略,至少包括车路协同策略、安全交规规则策略、通信工况和场景策略、案例串并联策略。
9、本发明实施例通过感知算法,能自动驾驶系统能够准确地感知周围环境,包括识别和跟踪其他车辆、行人、障碍物等,能够提高道路安全性;定位和地图算法能够准确确定自动驾驶车辆的位置,并将其与地图进行匹配,能够精确的定位和导航,确保车辆按照预定路径行驶;路径规划和决策算法能够根据当前交通情况和目标,生成最佳的行驶路径和决策策略,能够提高交通效率,减少拥堵;控制算法能够根据路径规划和决策算法生成的指令,精确控制车辆的加速、制动、转向等动作,能够确保车辆稳定行动;通过通信和联网算法,自动驾驶车辆可以与其他车辆、交通基础设施和云平台进行实时通信和数据交换,能够确保车辆之间的通信互联。而车路协同策略通过车辆和道路基础设施之间的信息交换和协作,能够提高交通流动性,提高道路利用率;通过安全交规规则策略基于交通规则和法规,能够确保自动驾驶车辆的行为符合道路交通法规;通过通信工况和场景策略,以使仿真层能够模拟不同的交通通信条件,例如交通流量、信号控制、通信延迟等;通过案例串并联策略,以使仿真层能够模拟不同的交通流控制策略,例如车辆串并联等。
10、在一种可选的实施方式中,所述应用层,包括:点云采集单元,用于基于采集设备获取实际道路以及实际场景的点云数据;模型提取单元,用于对所述点云数据进行切割和滤波处理,提取出地表模型信息;信息标注单元,用于对所述地表模型信息进行道路要素信息以及对应的属性和连接关系进行标注,对所述地表模型信息进行场景要素信息以及对应的属性和连接关系进行标注,将标注后的地表模型信息转换为车辆自动驾驶时的应用地图;模型生成单元,用于将所述应用地图中的道路要素信息以及对应的属性和连接关系导入至孪生模型,生成静态道路网格和交通设施位置信息作为道路模型数据,生成交通设施实体结构作为场景模型数据;数据传输单元,用于将所述道路模型数据以及场景模型数据转换为可读格式,并导入仿真层。
11、本发明实施例通过点云采集单元和模型提取单元,可以获取实际道路和场景的点云数据,并进行预处理提取出地表模型的几何信息,分别对道路和场景的属性关系进行标注得到标注后的应用地图;将应用地图中的道路要素信息、属性和连接关系导入到孪生模型中,生成静态道路网格和交通设施位置信息作为道路模型数据,生成交通设施实体结构作为场景模型数据,能够构建逼真的孪生场景模型,以使在仿真环境中进行自动驾驶的性能测试。
12、在一种可选的实施方式中,所述算法层,包括:车辆参数获取单元,用于基于第一接口实时获取车辆参数;车辆指令生成单元,用于基于自动驾驶算法以及车辆参数实时生成车辆控制指令;车辆指令格式化单元,用于将所述车辆控制指令打包为第一接口消息传输格式作为第一控制指令;车辆指令传输单元,用于将所述第一控制指令通过第一接口传输至仿真层。
13、本发明实施例通过车辆参数获取单元,实时从vissim仿真软件获取车辆参数,以生成车辆控制指令,例如加速度、转向角度等指令,控制车辆在仿真环境中的行为;通过将生成的车辆控制指令打包为第一接口消息传输格式,保证指令能够以标准化的格式正确传输,从而有效模拟自动驾驶车辆在不同场景下的行为。
14、在一种可选的实施方式中,所述云控层,包括:策略参数获取单元,用于基于第二接口实时获取策略参数;策略参数生成单元,用于基于交通仿真策略以及策略参数实时生成策略控制指令;策略参数格式化单元,用于将所述策略控制指令打包为第二接口消息传输格式作为第二控制指令;策略参数传输单元,用于将所述第二控制指令通过第二接口传输至仿真层。
15、本发明实施例通过策略参数获取单元,实时从vissim仿真软件获取策略参数,以生成交通流的策略控制指令,例如交通信号灯的相位、时长调整、多个车辆行驶策略等指令,控制交通流在仿真环境中的状态;通过将生成的交通流的策略控制指令打包为第二接口消息传输格式,保证指令能够以标准化的格式正确传输,从而有效模拟不同交通流的状态。
16、在一种可选的实施方式中,所述仿真层,包括:初始化单元,用于基于道路模型数据、场景模型数据以及预设的初始车辆参数和初始策略参数完成车路云模型的初始化操作;仿真执行单元,用于根据初始化的车路云模型执行车路云模型仿真测试;仿真数据生成单元,用于基于第一控制指令生成实时车辆行为仿真数据、基于第二控制指令生成实时策略仿真数据;仿真测试更新单元,用于基于所述实时车辆行为仿真数据、实时策略仿真数据实时更新车路云模型,并继续执行车路云模型仿真测试;仿真数据传输单元,用于并将所述车路云仿真测试过程中所产生的车辆参数传输至算法层,将所述车路云仿真测试过程中所产生的策略参数传输至云控层。
17、本发明实施例通过初始化单元加载道路模型数据、场景模型数据以及预设的初始车辆参数和初始策略参数,以建立起仿真环境,为后续的仿真测试做好准备;仿真执行单元模拟真实道路环境中的交通流动和车辆行为;仿真测试更新单元,能够动态的展示仿真过程中的车辆行为和交通流动,并且及时反馈仿真结果;仿真数据传输单元将产生的策略参数传输至云控层,将产生的车辆参数传输至算法层,以使云控层或者算法层进一步的优化更新,从而有效的实现了整个车路云模型的一体化闭环仿真测试,提高仿真测试效率。
18、在一种可选的实施方式中,所述仿真层,还包括:仿真结果反馈单元,用于获取车路云模型仿真测试结束后输出的测试结果;仿真评估单元,用于基于所述测试结果以及预设评价指标获取车路云模型仿真测试的综合评估结果。
19、本发明实施例通过仿真结果反馈单元反馈测试数据,仿真评估单元基于测试结果和预设评价指标,对车路云模型仿真测试进行综合评估,获得关于自动驾驶系统性能和安全性的指标和评价结果,全面评估整个仿真系统过程中自动驾驶的性能以及对不同策略的实现能力以及执行效果,进一步为实际的交通策略提供决策相关信息。
20、在一种可选的实施方式中,所述仿真层,还包括:仿真回溯单元,用于获取车路云模型仿真测试结束后输出的日志回访文件,所述日志回访文件用于回溯车路云模型仿真测试过程。
21、本发明实施例仿真回溯单元用于获取vissim仿真软件进行车路云模型仿真测试结束后输出的日志回访文件,文件记录了仿真测试过程中的详细信息,例如车辆行为、交通流动等信息;通过仿真回溯可以排查仿真过程中出现的问题,解决潜在的系统故障、算法错误、策略错误等问题,进一步优化自动驾驶的可靠性。
22、在一种可选的实施方式中,所述算法层,还用于基于预设算法性能指标和预设场景需求生成自动驾驶算法的算法优化需求,传输至云控层;所述云控层,还用于基于所述算法优化需求,利用车路协同策略、安全交规规则策略以及通信工况和场景策略生成算法优化参数,传输至算法层;所述算法层,还用于基于所述算法优化参数对自动驾驶算法进行优化。
23、本发明实施例通过预设算法性能指标和场景需求提前确定需要优化的需求,云控层利用车路协同策略和安全交规规则策略生成算法优化参数,算法层利用云控层生成的算法优化参数对自动驾驶算法进行优化,通过调整算法的参数、更新算法本身的逻辑和策略,以改进自动驾驶算法的性能和计算效率,进一步提高整个仿真系统的控制水平以及仿真效率。
24、第二方面,本发明实施例提供了一种车路云一体化的联合仿真方法,应用于上述第一方面所述的车路云一体化的联合仿真系统,方法包括:基于实际道路以及实际场景生成道路模型数据以及场景模型数据,并将所述道路模型数据以及场景模型数据导入仿真层;基于第一接口实时获取仿真层的车辆参数;基于所述车辆参数利用自动驾驶算法生成第一控制指令;基于第一接口将所述第一控制指令传输至仿真层;基于第二接口实时获取仿真层的策略参数;基于所述策略参数利用交通仿真策略生成第二控制指令;基于第二接口将所述第二控制指令传输至仿真层;基于道路模型数据、场景模型数据以及预设的初始车辆参数和初始策略参数进行车路云模型的初始化操作,并基于初始化的车路云模型执行车路云模型仿真测试;在车路云模型仿真测试过程中基于第一控制指令以及第二控制指令实时更新车路云模型,并基于更新后的车路云模型继续执行车路云模型仿真测试;将所述车路云仿真测试过程中实时产生的车辆参数传输至算法层,将所述车路云仿真测试中实时产生的策略参数传输至云控层。
25、第三方面,本发明实施例提供了一种车路云一体化的联合仿真设备,包括:处理器、存储器、通信接口和通信总线,处理器、存储器和通信接口通过通信总线完成相互间的通信;存储器用于存放至少一可执行指令,可执行指令使处理器执行如上述实施例的车路云一体化的联合仿真方法的操作。
26、第四方面,本发明实施例提供了一种计算机可读存储介质,其特征在于,存储介质中存储有至少一可执行指令,可执行指令在车路云一体化的联合仿真设备/装置上运行时,使得车路云一体化的联合仿真设备/装置执行如上述实施例的车路云一体化的联合仿真方法的操作。
- 还没有人留言评论。精彩留言会获得点赞!