一种无人机控制方法与流程
本发明涉及无人机控制,具体为一种无人机控制方法。
背景技术:
1、多旋翼无人机是一种先进的航空器,通过无线遥控设备进行控制,能够在无人驾驶的状态下执行一些特殊的任务。由于其具有垂直起降、灵活机动和可靠性高等特点,多旋翼无人机在许多领域都有着广泛的应用。多旋翼无人机的可靠性高,使其在执行任务时能够保证较高的成功率。由于其结构简单、维护方便,多旋翼无人机的使用寿命也相对较长。同时随着微电子技术的发展,计算机硬件和微电子传感器的小型化和多样化以及控制算法的不断优化,多旋翼无人机信息处理能力和速度得到了显著提升。这使得多旋翼无人机能够携带更多的探测和处理设备,执行任务的类型也越来越多样。多旋翼无人机凭借其独特的优势和不断优化的技术,在各个领域都有着广泛的应用前景。
2、随着科技的飞速发展,无人机已在许多领域得到广泛应用。无论是航拍、农业喷洒还是快递配送,无人机的出现都为我们的生活带来了极大的便利。然而,无人机控制精度的问题却一直困扰着使用者,虽然控制信号进行了加密,但如果无人机在飞行过程中出现信号干扰或失联,可能会对无人机的控制和飞行安全造成影响,同时实现实时监控、路径优化、状态反馈等功能需要复杂的算法和强大的计算能力,这可能会增加无人机的制造成本。同时,维护和更新这些复杂系统也需要专业知识,可能会增加长期运营成本。
技术实现思路
1、针对现有技术的不足,本发明提供了一种无人机控制方法,解决了在建筑物和峡谷等gps信号缺失的环境中,这种导航方式都难以发挥其优势的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种无人机控制方法,包括以下步骤:
3、步骤一,通过用户界面接收操作者的指令,这些指令可能包括但不限于目的地坐标、飞行高度、飞行速度;
4、步骤二,通过预先设定的算法解析接收到的指令,包括验证指令的正确性和可行性;
5、步骤三,将解析后的指令转换为无人机可识别的控制信号;
6、步骤四,通过无线信号传输方式将控制信号发送给无人机,包括但不限于使用蓝牙、wi-f i、4g/5g网络;
7、步骤五,接收无人机返回的状态信息,包括但不限于无人机的实时位置、飞行速度、飞行高度、电池状态、信号强度;
8、步骤六,解析无人机的状态信息,将其转换为操作者可理解的格式并反馈给操作者;
9、步骤七,根据无人机的状态信息调整控制信号,以优化飞行效率并保证飞行安全;
10、步骤八,控制无人机根据接收到的控制信号执行相应的动作;
11、步骤九,实时监控无人机的飞行状态,并在检测到异常时立即进行干预,包括但不限于发送紧急停止信号或指示无人机执行安全降落;
12、步骤十,记录无人机的飞行数据,包括但不限于飞行路径、飞行时间、飞行速度、飞行高度、电池使用情况、信号强度。
13、优选的,所述步骤一中,用户界面为物理设备或软件应用,其他可通过语音识别系统接收操作者的口头指令。
14、优选的,所述步骤二中,算法包括路径规划算法,以避免无人机飞行过程中的障碍,该算法也计算影响因素。
15、优选的,所述步骤四,无线信号传输通过加密方式进行,该加密方式为对称加密、非对称加密或哈希函数。
16、优选的,所述步骤五中,状态信息包括无人机的载荷状态,载荷状态作为计算无人机的质心。
17、优选的,所述步骤七中,调整控制信号可以通过机器学习算法进行,该算法可以根据历史飞行数据进行学习和优化。
18、优选的,所述步骤九中,异常包括但不限于无人机的电池电量低、信号弱、遇到障碍的情况,且无人机的飞行高度、飞行速度、飞行方向参数与预设值存在较大偏差,也应视为异常。
19、优选的,所述步骤九中,干预也可以包括指示无人机改变飞行路径以避免碰撞,此外,如果无人机的电池电量过低,干预也可以包括指示无人机立即返回或降落在最近的安全地点。
20、优选的,所述步骤十中,飞行数据可以被用于后续的飞行路径优化和飞行策略调整,这些数据也可以用于对无人机的性能进行评估和对飞行环境进行分析。
21、优选的,所述步骤十中,飞行数据也可以被用于无人机的维护和故障诊断,且通过分析飞行数据,可以预测无人机的部件磨损情况和可能出现的故障。
22、本发明提供了一种无人机控制方法。具备以下有益效果:
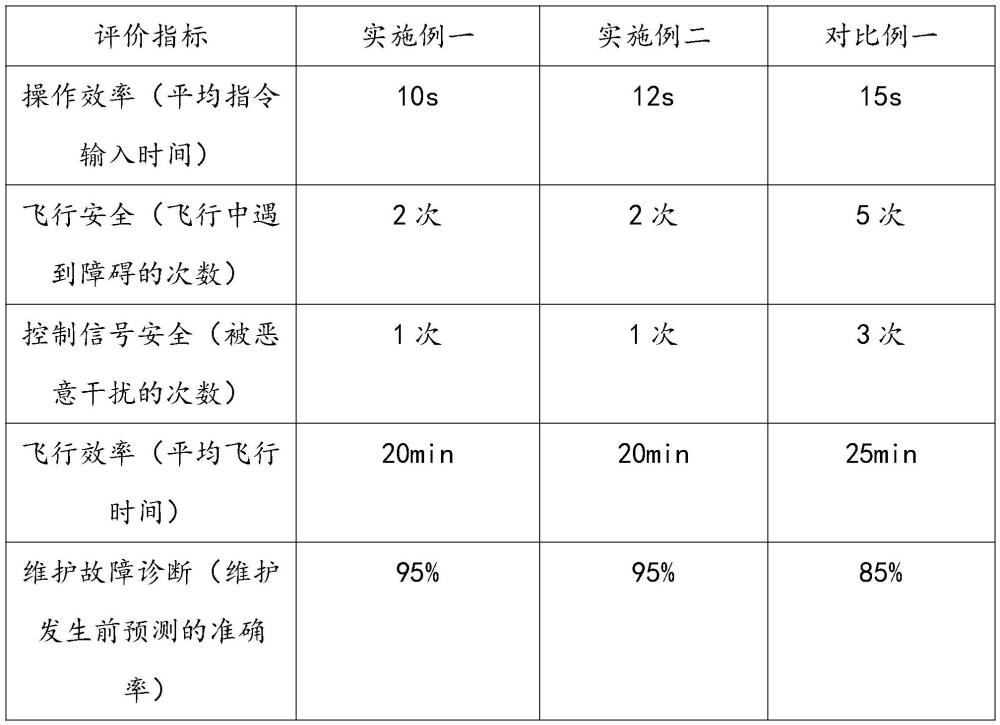
23、本发明通过用户界面接收操作者的指令,通过算法解析并转化为无人机可识别的控制信号,实时监控飞行状态,并在检测到异常时立即进行干预。这种方法的有益效果主要表现在提高控制精度和效率,通过精确和快速的响应,使操作者能够更好地控制无人机。同时,实时监控和及时干预飞行状态大大提高了飞行的安全性。此外,该方法还优化了无人机的飞行路径,提高了飞行效率,同时通过记录和分析飞行数据,可以有效维护无人机,预防故障,延长其使用寿命。在用户体验方面,将无人机的状态信息展示给操作者,使其能够实时了解无人机的状态,从而提高用户体验。在信号传输方面,采用加密技术,保护了无线信号的安全性,防止了控制信号被恶意干扰或窃取。总的来说,这种无人机控制方法提供了一种更安全、更高效、更易用的无人机操作体验,同时延长了无人机的使用寿命,保护了控制信号的安全性。
技术特征:
1.一种无人机控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种无人机控制方法,其特征在于,所述步骤一中,用户界面为物理设备或软件应用,其他可通过语音识别系统接收操作者的口头指令。
3.根据权利要求1所述的一种无人机控制方法,其特征在于,所述步骤二中,算法包括路径规划算法,以避免无人机飞行过程中的障碍,该算法也计算影响因素。
4.根据权利要求1所述的一种无人机控制方法,其特征在于,所述步骤四,无线信号传输通过加密方式进行,该加密方式为对称加密、非对称加密或哈希函数。
5.根据权利要求1所述的一种无人机控制方法,其特征在于,所述步骤五中,状态信息包括无人机的载荷状态,载荷状态作为计算无人机的质心。
6.根据权利要求1所述的一种无人机控制方法,其特征在于,所述步骤七中,调整控制信号可以通过机器学习算法进行,该算法可以根据历史飞行数据进行学习和优化。
7.根据权利要求1所述的一种无人机控制方法,其特征在于,所述步骤九中,异常包括但不限于无人机的电池电量低、信号弱、遇到障碍的情况,且无人机的飞行高度、飞行速度、飞行方向参数与预设值存在较大偏差,也应视为异常。
8.根据权利要求1所述的一种无人机控制方法,其特征在于,所述步骤九中,干预也可以包括指示无人机改变飞行路径以避免碰撞,此外,如果无人机的电池电量过低,干预也可以包括指示无人机立即返回或降落在最近的安全地点。
9.根据权利要求1所述的一种无人机控制方法,其特征在于,所述步骤十中,飞行数据可以被用于后续的飞行路径优化和飞行策略调整,这些数据也可以用于对无人机的性能进行评估和对飞行环境进行分析。
10.根据权利要求1所述的一种无人机控制方法,其特征在于,所述步骤十中,飞行数据也可以被用于无人机的维护和故障诊断,且通过分析飞行数据,可以预测无人机的部件磨损情况和可能出现的故障。
技术总结
本发明涉及无人机控制技术领域,公开了一种无人机控制方法,包括以下步骤:步骤一,通过用户界面接收操作者的指令,这些指令可能包括但不限于目的地坐标、飞行高度、飞行速度;步骤二,通过预先设定的算法解析接收到的指令,包括验证指令的正确性和可行性;步骤三,将解析后的指令转换为无人机可识别的控制信号;步骤四,通过无线信号传输方式将控制信号发送给无人机。通过用户界面接收和解析指令,将其转化为无人机可识别的控制信号,实现精准和高效的控制,系统实时监控飞行状态,发现异常时能立即干预,大大提高了飞行安全性,优化飞行路径和分析飞行数据维护无人机,不仅提升了飞行效率,也有助于预防故障。
技术研发人员:韩云豪,黄小青,胡延宝
受保护的技术使用者:中飞赛维智能科技股份有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!