基于MCU的整车信号模拟系统的制作方法
本发明涉及电子电路领域,尤其涉及一种基于mcu的整车信号模拟系统。
背景技术:
1、新能源汽车的驱动电机系统与整车其余相关系统通过信号交互逐渐成为一个整体,电机控制器的控制信号由整车控制器通过can总线发出,为了让电机在台架上正常运转,需要控制信号输出合适的数值。对于混合动力汽车,驱动电机系统除了由整车控制器控制,还与发动机控制器有信号交互,因此对标更为复杂。考虑到以上因素,需要建立一套完整的驱动电机信号解析及模拟系统。之前对于电驱动系统的对标主要针对电机硬件本身的结构,较少提及电驱动系统性能的对标。这就亟需本领域技术人员解决相应的技术问题。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种基于mcu的整车信号模拟系统。
2、为了实现本发明的上述目的,本发明提供了一种基于mcu的整车信号模拟系统,包括:
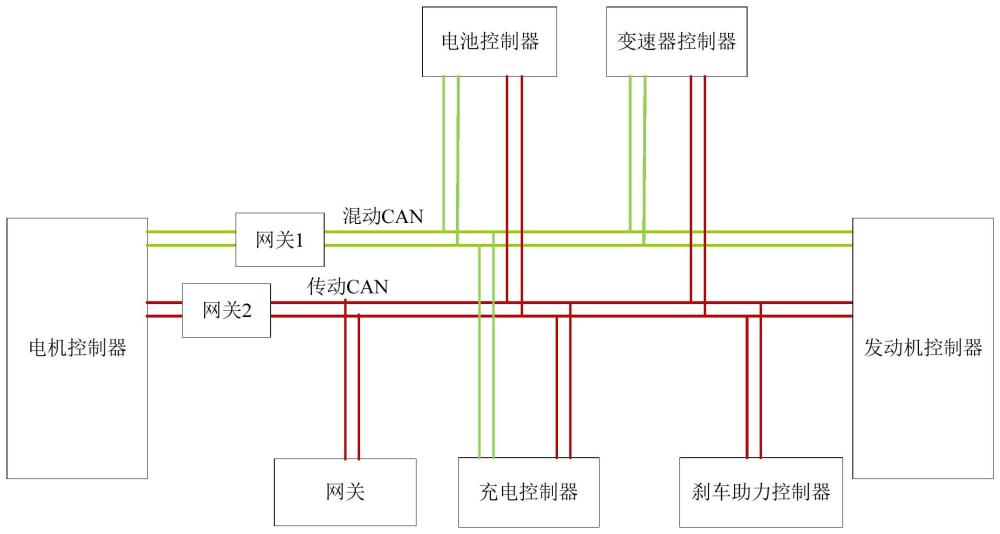
3、第一网关电机信号交互端分别连接电机控制器信号发送端,第一网关发动机信号交互端连接发动机控制器信号发送端,第一网关电池信号交互端连接电池控制器信号发送端,第一网关变速器信号交互端连接变速器控制器信号发送端,第一网关充电信号交互端连接充电控制器信号输出端,第一网关刹车助力信号交互端连接刹车助力信号输出端;
4、第二网关电机信号交互端分别连接电机控制器信号发送端,第二网关发动机信号交互端连接发动机控制器信号发送端,第二网关电池信号交互端连接电池控制器信号发送端,第二网关变速器信号交互端连接变速器控制器信号发送端,第二网关充电信号交互端连接充电控制器信号输出端,第二网关刹车助力信号交互端连接刹车助力信号输出端。
5、上述技术方案优选的,,还包括:进行信号模拟的过程,初始化混动管理模块,然后获取目标扭矩、发动机的目标转速,采集不同时段的状态值形成状态向量,进行状态向量提取混动控制信号的输出参数;在混动控制信号中使用神经网络技术计算优化参数。
6、上述技术方案优选的,还包括:
7、根据扭矩控制模式中需要的目标扭矩进行车辆能量计算,
8、p=t·rpm,其中t为电机扭矩,rpm为电机转速;
9、所以电机扭矩为输出功率一定时,转速与扭矩成反比;所以得出目标扭矩;
10、根据设定扭矩t′计算模拟差异状态值为δt=|t-t′|;
11、目标扭矩是根据实验的模拟需求进行实时调整获取,从而达到不同工况状态下的不同实验数据;
12、根据时序采集差异状态值形成的状态向量其中n为正整数,根据需要的时间序列进行数值定义;
13、根据形成的状态向量在混动管理模块中发出噪声向量,训练模拟环境下产生的噪声向量,通过模拟混合动力状态下,行驶工况的输入模拟量,对于混动管理模块中所预设的电流、电压值调整相应的目标扭矩;根据状态向量以及噪声向量σ形成干扰数据的分布函数
14、根据设定的分布数据形成干扰状态的分布函数;通过该分布函数的分布数据进行混动状态下整车的评估;
15、周期性通过混动管理模块调整电机转速,调整周期为10s,根据在每一周期内执行的模拟操作要求,满足损失函数计算公式:
16、m(t)=qt(kt,l)-(jt(kt,l)+μmaxq(kt+1,l)+h(kt+1))
17、其中,qt(kt,l)为某一时刻t的模拟整车电机转速工作状态k,执行的干扰数据分布函数l下的q值,jt(kt,l)为计算该时刻t的模拟整车电机转速工作状态k,执行的的干扰数据分布函数l下的期望值,μ∈[0,1)为折扣因子,maxq(kt+1,l)是在该时间周期内下一时刻求取q值的最大值,h(kt+1)为下一时刻工作状态的动作状态值。
18、上述技术方案优选的,还包括:
19、校验码是为了防止总线数据在传输中改变或人为篡改的情况,因此模拟信号的同时就涉及到校验值的修改。经解析知gte采用的crc算法与传统crc-8算法类似,多项式为2f,初始值与结果异或值均为ff,输入数据与输出结果无需反转。区别在于输入数据取原始数据第二至第八字节,并在最后附上一个字节的固定数据组成八个字节的新数据,再用新数据进行计算。
20、上述技术方案优选的,还包括硬件抽象层、服务层、应用层以及操作系统,其中硬件抽象层只与微控制器硬件相关,用于实现硬件的各模块功能;服务层是硬件抽象层与应用层的接口,主要用于数据的传递,操作系统分时调度各功能模块。
21、上述技术方案优选的,还包括:
22、转发can总线上的数据帧,以及根据工况修改can总线上的数据并转发给mcu.(2)校验算法模块
23、校验信息是将传输的数据通过一定算法得到,一般为一个字节。网关模块修改整车电控系统信号值的同时需修改相应的校验码,否则mcu认为相关信号不可信,导致系统无法正常工作。因此需要专门的校验算法模块进行校验码的解析及计算。
24、上述技术方案优选的,还包括:
25、通过mcu对整车信号进行模拟测试,
26、目标电机转速:报文id 0x51;
27、目标电机扭矩:报文id 0x90;
28、发动机转速:报文id 0x187;
29、车速:报文id 0xfd;
30、轮速:报文id 0xb2;
31、档位:报文id 0x394。
32、综上所述,由于采用了上述技术方案,本发明的有益效果是:
33、该系统通过两个网关(第一网关和第二网关)分别与电机控制器、发动机控制器、电池控制器、变速器控制器、充电控制器和刹车助力信号输出端连接,可以确保信号的稳定传输,减少信号丢失或干扰的可能性。
34、简化系统结构:通过将所有的信号交互端都连接到一个或两个网关上,可以简化整个系统的结构和布线,提高系统的维护性和扩展性。
35、便于远程控制与监控:由于所有的控制信号和反馈信号都可以通过网关进行传输和处理,因此可以通过与上位机或远程服务器进行通信,实现对整个车辆的远程控制和状态监控。
36、增强可扩展性:系统设计为模块化结构,可以根据需要添加或删除某些信号交互端,从而方便系统的升级和扩展。
37、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于mcu的整车信号模拟系统,其特征在于,包括:
2.根据权利要求1所述的基于mcu的整车信号模拟系统,其特征在于,还包括:进行信号模拟的过程,初始化混动管理模块,然后获取目标扭矩、发动机的目标转速,采集不同时段的状态值形成状态向量,进行状态向量提取混动控制信号的输出参数;在混动控制信号中使用神经网络技术计算优化参数。
3.根据权利要求2所述的基于mcu的整车信号模拟系统,其特征在于,还包括:
4.根据权利要求1所述的基于mcu的整车信号模拟系统,其特征在于,还包括:
5.根据权利要求1所述的基于mcu的整车信号模拟系统,其特征在于,还包括硬件抽象层、服务层、应用层以及操作系统,其中硬件抽象层只与微控制器硬件相关,用于实现硬件的各模块功能;服务层是硬件抽象层与应用层的接口,主要用于数据的传递,操作系统分时调度各功能模块。
6.根据权利要求1所述的基于mcu的整车信号模拟系统,其特征在于,还包括:
7.根据权利要求1所述的基于mcu的整车信号模拟系统,其特征在于,还包括:
8.根据权利要求1所述的基于mcu的整车信号模拟系统,其特征在于,还包括:在高扭矩状态下实验过程为,
9.根据权利要求1所述的基于mcu的整车信号模拟系统,其特征在于,还包括:在低扭矩状态下实验过程为,
技术总结
本发明提出了一种基于MCU的整车信号模拟系统,包括:第一网关电机信号交互端分别连接电机控制器信号发送端,第一网关发动机信号交互端连接发动机控制器信号发送端,第一网关电池信号交互端连接电池控制器信号发送端,第一网关变速器信号交互端连接变速器控制器信号发送端,第一网关充电信号交互端连接充电控制器信号输出端,第二网关发动机信号交互端连接发动机控制器信号发送端,第二网关电池信号交互端连接电池控制器信号发送端,第二网关变速器信号交互端连接变速器控制器信号发送端,第二网关充电信号交互端连接充电控制器信号输出端,第二网关刹车助力信号交互端连接刹车助力信号输出端。
技术研发人员:晏飘,吴俊林,贾志强,刘鑫,周亚棱,关静,邓有志,梁佳韵,万京
受保护的技术使用者:中汽院新能源科技有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!