路径规划方法和装置与流程
本技术涉及仓储物流,尤其是涉及一种路径规划方法和装置。
背景技术:
1、在物流仓储和车间制造等系统中,通常使用移动机器人来替代人力完成搬运工作,以提高仓储系统的工作效率。例如,仓储系统可以通过对机器人进行集群调度,为多个机器人规划从起点到终点的行驶路径,并对机器人进行持续调度,以使各机器人无碰撞地尽快到达终点。但是,随着机器人数量的增大,多个机器人在仓库中移动时发生冲突的情况也会增多,因此,如何在有限的计算资源的基础上,减少仓储系统中多个机器人发生拥堵的情况成为亟待解决的问题。
技术实现思路
1、为了解决上述问题,本技术实施例提供了一种路径规划方法和装置,可以在有限的计算资源的基础上,减少仓储系统中多个机器人之间发生死锁和拥堵的情况,提高通行效率。具体地,本技术实施例公开了以下技术方案:
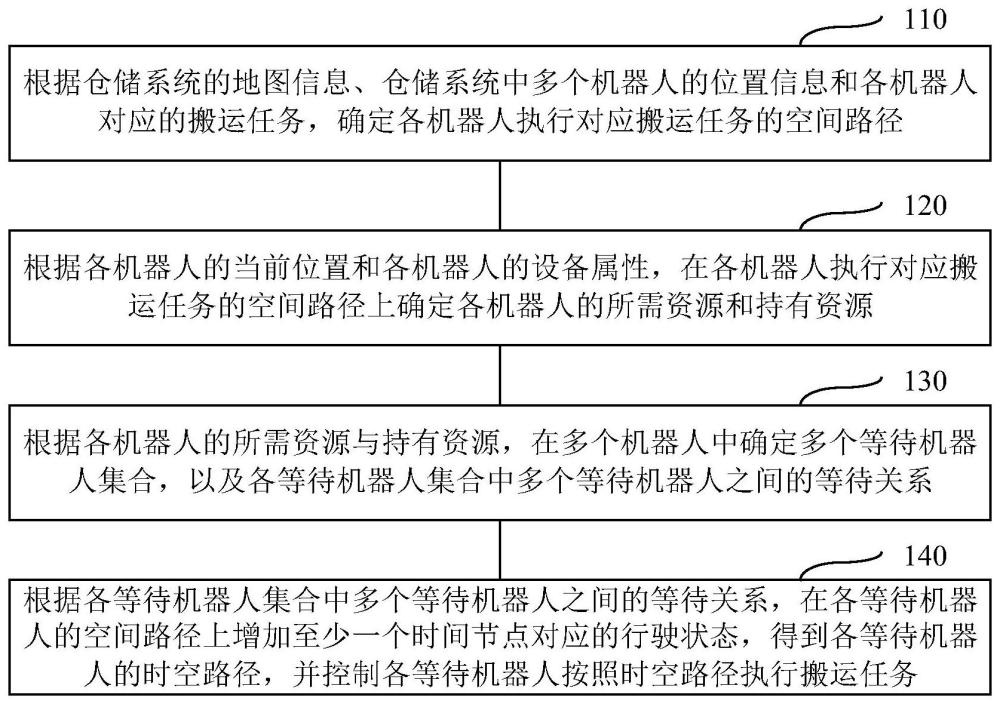
2、本技术实施例第一方面提供一种路径规划方法,应用于控制装置,该方法包括:首先,根据仓储系统的地图信息、仓储系统中多个机器人的位置信息和各机器人对应的搬运任务,确定各机器人执行对应搬运任务的空间路径。其次,根据各机器人的当前位置和各机器人的设备属性,在各机器人执行对应搬运任务的空间路径上确定各机器人的所需资源和持有资源。然后,根据各机器人的所需资源与持有资源,在多个机器人中确定多个等待机器人集合,以及各等待机器人集合中多个等待机器人之间的等待关系。根据各等待机器人集合中多个等待机器人之间的等待关系,在各等待机器人的空间路径上增加至少一个时间节点对应的行驶状态,得到各等待机器人的时空路径。并控制各等待机器人按照时空路径执行搬运任务;其中,行驶状态包括行驶和等待。
3、在一些实施例中,根据各机器人的当前位置和各机器人的设备属性,在各机器人执行对应搬运任务的空间路径上确定各机器人的所需资源和持有资源,包括:根据各机器人的当前位置、各机器人的设备属性以及各机器人执行对应搬运任务的空间路径,确定各机器人从当前位置所在的当前路径点位移动至下一路径点位时的运动包络;将各机器人从当前路径点位移动至下一路径点位时的运动包络确定为各机器人的所需资源;根据各机器人的当前位置和各机器人的设备属性,确定各机器人位于当前路径点位时的静止包络;将各机器人位于当前路径点位时的静止包络确定为各机器人的持有资源。
4、在一些实施例中,根据各机器人的所需资源与持有资源,在多个机器人中确定多个等待机器人集合,以及各等待机器人集合中多个等待机器人之间的等待关系,包括:若多个机器人中任一第一机器人的所需资源与第二机器人的持有资源之间存在交集,则确定第一机器人和第二机器人为等待机器人,并将第一机器人和第二机器人添加至等待机器人集合;确定第一机器人和第二机器人的等待关系为第一机器人等待第二机器人。
5、在一些实施例中,根据各等待机器人集合中多个等待机器人之间的等待关系,在各等待机器人的空间路径上增加至少一个时间节点对应的行驶状态,得到各等待机器人的时空路径,包括:根据等待机器人集合中各等待机器人的等待关系,确定各等待机器人通过等待机器人集合对应的冲突区域的先后顺序;根据各等待机器人通过冲突区域的先后顺序,确定冲突区域中的至少一个路径点位上各等待机器人在至少一个时间节点对应的行驶状态;基于冲突区域中的至少一个路径点位上各等待机器人在至少一个时间节点对应的行驶状态,在各等待机器人的空间路径上增加至少一个时间节点的行驶状态,得到各等待机器人的时空路径。
6、在一些实施例中,根据等待机器人集合中各等待机器人的等待关系,确定各等待机器人通过等待机器人集合对应的冲突区域的先后顺序,包括:根据等待机器人集合中各等待机器人的等待关系,建立等待机器人集合中多个等待机器人的等待关系拓扑排序;根据等待关系拓扑排序,确定各等待机器人的规划优先级;根据各等待机器人规划优先级,确定各等待机器人通过等待机器人集合对应的冲突区域的先后顺序。
7、在一些实施例中,根据等待机器人集合中各等待机器人的等待关系,建立等待机器人集合中多个等待机器人的等待关系拓扑排序,包括:以等待机器人集合中各等待机器人为顶点,以各等待机器人的等待关系为边,构造有向无环图;将有向无环图中各顶点的等待机器人排成线性序列,得到等待关系拓扑排序。
8、在一些实施例中,在根据各等待机器人集合中多个等待机器人之间的等待关系,在各等待机器人的空间路径上增加至少一个时间节点对应的行驶状态,得到各等待机器人的时空路径之后,该方法还包括:根据仓储系统中至少一个非等待机器人的空间路径,确定各非等待机器人对应的时空路径;根据各等待机器人的时空路径和至少一个非等待机器人的时空路径,生成根节点,并将根节点添加至节点列表中;在节点列表中确定参考节点;其中,参考节点为节点列表中代价最小的节点;根据各等待机器人和各非等待机器人的设备属性,对参考节点进行包络冲突检测,生成参考节点对应的包络冲突集合;根据包络冲突集合和预设冲突解决策略,确定包络冲突集合对应的子节点;其中,预设冲突解决策略包括等待和继续行驶;将子节点添加至节点列表中,并迭代执行在节点列表中确定参考节点的步骤,直至包络冲突集合为空或满足迭代停止条件,确定各等待机器人和各非等待机器人对应的目标时空路径。
9、在一些实施例中,迭代停止条件包括:节点列表为空、迭代时间超过预设时间阈值和迭代次数超过预设次数阈值中的至少一项。
10、在一些实施例中,直至包络冲突集合为空或满足迭代停止条件,确定各等待机器人和各非等待机器人的目标时空路径,包括:若直至包络冲突集合为空,则将参考节点对应的时空路径确定为各等待机器人和各非等待机器人的目标时空路径;若直至满足迭代停止条件,则将代价最小的节点对应的时空路径确定为各等待机器人和各非等待机器人的目标时空路径。
11、在一些实施例中,根据仓储系统的地图信息、仓储系统中多个机器人的位置信息和各机器人对应的搬运任务,确定各机器人执行对应搬运任务的空间路径,包括:根据各机器人的位置信息、各机器人对应的搬运任务的任务起点和任务终点,在地图信息上确定各机器人执行搬运任务的至少一条规划路径;在至少一条规划路径中确定空间路径;其中,空间路径为至少一条规划路径中代价最小的路径,和/或,空间路径为至少一条规划路径中不包括预设热度区域的路径。
12、在一些实施例中,该方法还包括:根据各机器人的当前位置和各机器人执行搬运任务的空间路径,在多个机器人中确定发生死锁的死锁机器人;根据解死锁策略,控制死锁机器人通过死锁区域;其中,解死锁策略包括为死锁机器人重新规划空间路径。
13、本技术实施例第二方面提供一种路径规划装置,包括第一路径确定模块、资源确定模块、关系确定模块、第二路径确定模块以及控制模块。其中,第一路径确定模块,被配置为根据仓储系统的地图信息、仓储系统中多个机器人的位置信息和各机器人对应的搬运任务,确定各机器人执行对应搬运任务的空间路径。资源确定模块,被配置为根据各机器人的当前位置和各机器人的设备属性,在各机器人执行对应搬运任务的空间路径上确定各机器人的所需资源和持有资源。关系确定模块,被配置为根据各机器人的所需资源与持有资源,在多个机器人中确定多个等待机器人集合,以及各等待机器人集合中多个等待机器人之间的等待关系。第二路径确定模块,被配置为根据各等待机器人集合中多个等待机器人之间的等待关系,在各等待机器人的空间路径上增加至少一个时间节点对应的行驶状态,得到各等待机器人的时空路径;其中,行驶状态包括行驶和等待。控制模块,被配置为控制各等待机器人按照时空路径执行搬运任务。
14、本技术实施例第三方面提供了一种电子设备,包括:处理器和存储器,所述存储器,用于存储计算机可执行指令;所述处理器,用于从所述存储器中读取所述指令,并执行所述指令以实现前述第一方面所述的路径规划方法。
15、本技术实施例第四方面提供了一种计算机可读存储介质,所述存储介质存储有计算机程序指令,当计算机读取所述指令时,执行前述第一方面所述的路径规划方法。
16、本技术实施例第五方面提供了一种计算机程序产品,该计算机程序产品包括存储在非暂态计算机可读存储介质上的计算程序,该计算机程序包括程序指令,当该程序指令被计算机执行时,使该计算机执行前述第一方面所述的路径规划方法。
17、本技术实施例第六方面提供一种计算机程序,当该计算机程序被处理器执行时,可以实现前述第一方面所述的路径规划方法。
18、本技术实施例提供的路径规划方法和装置,可以根据地图信息、多个机器人的位置信息和各机器人对应的搬运任务,确定各机器人执行对应搬运任务的空间路径,然后,根据各机器人的当前位置和各机器人的设备属性,在各机器人的空间路径上确定各机器人的所需资源和持有资源,并根据各机器人的所需资源与持有资源,确定多个等待机器人集合,以及各等待机器人集合中多个等待机器人之间的等待关系。最后,根据各等待机器人集合中多个等待机器人之间的等待关系,在各等待机器人的空间路径上增加至少一个时间节点对应的行驶状态,得到各等待机器人的时空路径,并控制各等待机器人按照该时空路径执行搬运任务,该行驶状态包括行驶和等待。本技术实施例以各机器人的空间路径为基础,通过在具有等待关系的等待机器人的空间路径上增加各时间节点的行驶状态(等待或行驶),以将各等待机器人的空间路径转换为时空路径,能够在为机器人分配所需资源的同时进行冲突决策,从而避免了多个等待机器人之间发生拥堵和死锁,并降低了系统的计算复杂度,加快了计算速度。
- 还没有人留言评论。精彩留言会获得点赞!