一种基于无人机的迁飞性害虫检测跟踪和飞升抑制方法
本发明属于无人机病虫害检测和捕杀领域,具体涉及一种基于无人机的迁飞性害虫检测跟踪和飞升抑制方法。
背景技术:
1、迁飞性害虫的迁飞现象是一个非常复杂的生态现象,大面积破坏农田作物,威胁着人类的粮食安全。目前,害虫检测常用的方法为无人机遥感检测、卫星遥感影像和深度学习,其中,遥感检测属于高空检测,极易受到自然环境、天气的影像而无法进行准确检测,而且高空检测的重要局限在于高空图像的分辨率非常低,一般只能检测到超大规模迁飞的害虫集群,难以准确地检测害虫个体或者低空害虫群落,同时部分方法需要进行离线处理,因此无法及时检测和及时反馈进行害虫捕杀作业,且成本也高。
2、另外,目前现有的害虫捕杀装置多为地面固定装置,属于被动捕杀害虫装置,多以诱导灯光、诱导声音或诱导剂来引诱害虫主动飞往捕杀装置,进而进行捕杀,因此地面害虫捕获装置具有非常大的局限性。
3、综上所述,设计出以深度学习为基础,无人机迁飞性害虫检测和无人机迁飞性害虫跟踪为手段,进行主动对迁飞性害虫低空抑制的技术已经迫在眉睫。
技术实现思路
1、本发明为了克服现有技术存在的不足,提供了一种基于无人机的迁飞性害虫检测跟踪和飞升抑制方法,所述迁飞性害虫检测跟踪和飞升抑制方法可以实现对迁飞性害虫的实时检测定位和跟踪,同时对作物近地端的害虫进行引诱和扰动,并实现将害虫捕杀于作业范围内。
2、本发明解决上述技术问题的技术方案是:
3、一种基于无人机的迁飞性害虫检测跟踪和飞升抑制方法,包括以下步骤:
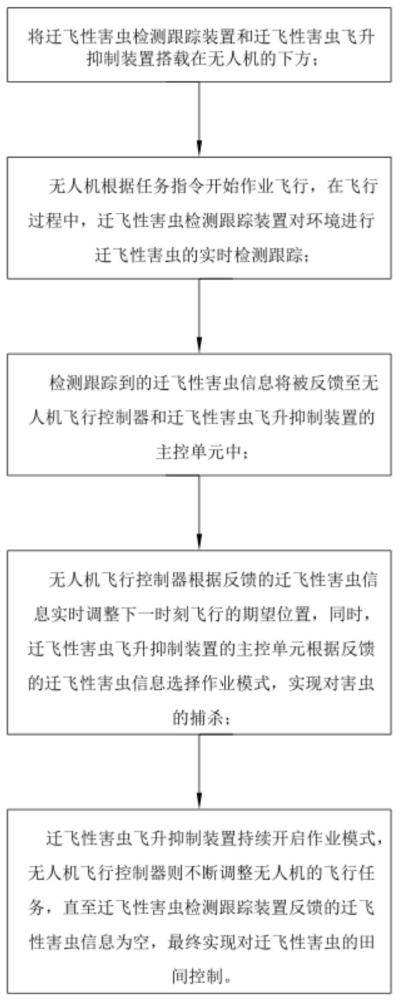
4、s1:将迁飞性害虫检测跟踪装置和迁飞性害虫飞升抑制装置搭载在无人机的下方;
5、s2:无人机根据任务指令开始作业飞行,在飞行过程中,迁飞性害虫检测跟踪装置进行迁飞性害虫的实时检测跟踪;
6、s3:检测跟踪到的迁飞性害虫信息将被反馈至无人机飞行控制器和迁飞性害虫飞升抑制装置的主控单元中;
7、s4:无人机飞行控制器根据反馈的迁飞性害虫信息实时调整下一时刻飞行的期望位置,同时,迁飞性害虫飞升抑制装置的主控单元则根据反馈的迁飞性害虫信息选择作业模式,实现对迁飞性害虫的捕杀;
8、s5:迁飞性害虫飞升抑制装置持续开启作业模式,无人机飞行控制器则不断调整无人机的飞行任务,直至迁飞性害虫检测跟踪装置反馈的迁飞性害虫信息为空,最终实现对迁飞性害虫的田间控制。
9、优选的,所述迁飞性害虫检测跟踪装置包括迁飞性害虫检测跟踪传感器、处理单元和通信单元,其中,所述迁飞性害虫检测跟踪传感器分别设置在无人机和地面站上;所述处理单元内设置有基于卷积神经网络的迁飞性害虫检测跟踪模型;通过迁飞性害虫检测跟踪模型来实时检测、保存迁飞性害虫的位置信息,并反馈到迁飞性害虫飞升抑制装置的主控单元中。
10、优选的,所述迁飞性害虫检测跟踪模型的基本训练样本为迁飞性害虫的图像数据集,图像数据集包括迁飞性害虫的图像和经标注处理后的迁飞性害虫的标签文件;该迁飞性害虫检测跟踪模型包括主干网络层,颈部网络层和头部网络层;
11、所述主干网络层以csp-darknet53为网络主体,包括深度可分离卷积、c3模块、sppf模块,其中,所述深度可分离卷积包括深度卷积和逐点卷积,用于获取多尺度迁飞性害虫特征层;
12、所述颈部网络层和所述头部网络层利用自注意力机制在主干网络层输出的多尺度迁飞性害虫特征层上增强尺度感知以及在空间位置上增强空间尺度感知,构建能够统一尺度感知、空间感知和任务感知的新型动态检测头部网络。
13、优选的,所述迁飞性害虫信息包括迁飞性害虫个体和群体的分类信息、数量、迁飞性害虫个体和群体的空间位置信息、迁飞性害虫个体位置点的信息矩阵,其中,每一个位置点即为每一只害虫的空间位置坐标。
14、优选的,在步骤s2中,地面站向无人机发送迁飞性害虫迁飞抑制区域位置信息和作业总时间指令后,无人机开始作业,并实时保持与地面站的信息传输;无人机飞至迁飞性害虫迁飞抑制区域的范围内时,迁飞性害虫检测跟踪装置启动,实时检测并传输检测结果至无人机飞行控制器和迁飞性害虫飞升抑制装置中的主控单元中。
15、优选的,在步骤s4中,无人机飞行控制器根据反馈的迁飞性害虫信息,实时调整下一时刻飞行的期望位置,具体调整方法为:
16、a1:若在迁飞性害虫检测跟踪装置的检测范围内存在迁飞性害虫,即触发无人机飞行控制器中的无人机位置调整进程和启动迁飞性害虫飞升抑制装置的作业模式;
17、a2:将迁飞性害虫集群的空间位置信息进行实时解算,得到迁飞性害虫集群的所有位置信息点集的高度最大值和边界点信息矩阵;
18、a3:无人机沿着实时解算的期望位置飞行,直至检测到的害虫数小于设定阈值时,无人机结束飞行作业任务。
19、优选的,在步骤a2中,所述迁飞性害虫集群的空间位置信息的解算步骤为:
20、a21:解算检测到的所有迁飞性害虫的位置矩阵的高度最大值;
21、a22:解算迁飞性害虫群体的最大水平面的害虫集群位置信息矩阵,并计算其最小外接圆的位置信息;
22、a23:选择迁飞性害虫的不规则空间体中的最大水平面的害虫集群位置矩阵的中心位置点作为期望位置的计算基点;
23、a24:将上述解算得到的信息进行实时反馈后,无人机实时解算下一时刻的期望位置。
24、优选的,所述迁飞性害虫飞升抑制装置包括设置在无人机下方的伸缩冲击诱捕炮嘴、迁飞性害虫飞升抑制功能罩和功能罩控制单元;
25、所述伸缩冲击诱捕炮嘴包括支撑件以及设置在所述支撑件下端的冲击诱捕炮嘴,其中,所述支撑件包括托盘、设置在所述托盘上的伸缩杆以及设置在所述伸缩杆上端的十字滑轨,其中,所述十字滑轨的上端安装在所述无人机上,下端则与所述伸缩杆的固定部铰接;所述伸缩杆的固定部安装在所述托盘的中心位置处,该伸缩杆的活动部则位于所述托盘的下方;所述冲击诱捕炮嘴包括设置在所述伸缩杆的活动部上的多频段超声波发生器和空气冲击喷头;所述迁飞性害虫检测跟踪传感器为多组,多组迁飞性害虫检测跟踪传感器安装在所述托盘的下侧,且呈环形阵列;
26、所述迁飞性害虫飞升抑制功能罩包括罩体以及用于驱动所述罩体张开或收缩的开合驱动机构,其中,所述罩体包括安装座、设置在安装座上的翼尖面和翼尾面;所述翼尖面和所述翼尾面均为多组,多组翼尖面和翼尾面均环形阵列,且所述翼尾面安装在所述翼尖面的外侧;所述安装座安装在所述伸缩杆的固定部上,该安装座上设置有多组安装槽,多组安装槽环形阵列,所述翼尖面中远离所述翼尾面的端部铰接在所述安装座的安装槽内;每组翼尖面的下侧均设置有喷药装置,所述喷药装置也呈阵列排列。
27、优选的,所述开合驱动机构包括固定座以及设置在所述固定座上的多组直线驱动器,其中,所述固定座安装在所述伸缩杆的固定部的外侧,且两者同轴设置;多组直线驱动器呈环形阵列,每组直线驱动器的一端铰接在所述固定座上,另一端则铰接在所述翼尖面上。
28、优选的,在步骤s4中,所述的作业模式包括伸缩冲击诱捕炮嘴触发模式和迁飞性害虫飞升抑制功能罩触发模式;
29、所述伸缩冲击诱捕炮嘴触发模式为:
30、伸缩冲击诱捕炮嘴具备触发扰动功能和靶标喷施功能,由主控单元控制触发;当迁飞性害虫检测跟踪传感器检测到迁飞性害虫并将迁飞性害虫的位置信息反馈到主控单元时,主控单元触发伸缩冲击诱捕炮嘴的扰动功能:主控单元将控制多频段超声波发生器发出超声波,惊扰迁飞性害虫产生应激反应,使其暴露于迁飞性害虫检测跟踪装置的检测范围内;所述迁飞性害虫飞升抑制功能罩将迁飞性害虫进行捕杀,同时,空气冲击喷头喷出高压气体,促使迁飞性害虫暴露于作物冠层上方,并处于迁飞性害虫检测跟踪传感器的检测范围内;同时,主控单元触发伸缩冲击诱捕炮嘴的靶标喷施功能:空气冲击喷头能够释放粘性除虫药剂,粘黏并捕杀迁飞性害虫,抑制其迁飞;
31、所述迁飞性害虫飞升抑制功能罩触发模式为:
32、当迁飞性害虫检测跟踪传感器检测到迁飞性害虫并将迁飞性害虫的位置信息反馈到主控单元时,主控单元触发翼尖面作业,并接收迁飞性害虫的位置信息后启动喷药装置,喷药装置释放粘性除虫药剂,在作业空间中形成迁飞性害虫迁飞抑制粘性药剂包络,以此将飞行中的迁飞性害虫囊括在迁飞性害虫迁飞抑制粘性药剂包络内,从而捕杀或抑制迁飞性害虫的迁飞行为;同时,主控单元触发翼尾面作业:若有迁飞性害虫飞升并触碰到翼尾面,则迁飞性害虫被所述翼尾面的粘性药剂粘黏,所述翼尾面通电将粘黏的迁飞性害虫击杀。
33、本发明与现有技术相比,具有如下优点和有益效果:
34、(1)本发明的基于无人机的迁飞性害虫检测跟踪和飞升抑制方法打破了传统的害虫检测跟踪的方法和被动害虫捕杀装置的杀虫方式,通过迁飞性害虫检测跟踪装置实现了对迁飞性害虫的实时检测定位和跟踪,并给无人机飞行控制器反馈迁飞性害虫的位置坐标信息,使得无人机飞行控制器实时改变其飞行任务(例如飞行路径),同时,迁飞性害虫飞升抑制装置通过反馈的迁飞性害虫的位置坐标信息,开展对迁飞性害虫的捕杀,直至迁飞性害虫检测跟踪装置反馈的迁飞性害虫信息为空,最终实现对迁飞性害虫的田间控制。
35、(2)本发明的基于无人机的迁飞性害虫检测跟踪和飞升抑制方法具有作业灵活性优势和高效性。
- 还没有人留言评论。精彩留言会获得点赞!