基于BIM的建筑工地机器人巡检导航控制方法及系统
本发明涉及机器人导航控制,特别涉及一种基于bim的建筑工地机器人巡检导航控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术,并不必然构成现有技术。
2、为了保证施工的安全,往往需要对建筑工地进行多轮次的巡检甚至是实时巡检,但是建筑工地的环境因素复杂,作业条件差,单纯的通过人工巡检的方式往往无法及时的巡检以排除安全隐患。而且,随着建设工程项目不断向着现代化、大型化、信息化的方向发展,对建筑工地的安全要求也越来越高,传统的人工巡检的工程管理模式已经不再适应行业的发展需求。
3、目前,机器人越来越多的应用到施工巡检中,例如cn117053780a公开了一种基于uwb定位的建筑工地安全监测机器人系统及方法,其能够实现对建筑工地中的多种元素进行准确监测和识别;再例如cn209292957u公开了一种建筑工地动态巡察与扬尘测控机器人,机器人在无人控制下行走工作,实时自动巡检施工现场的扬尘指标,并自动启动动力系统和扬尘抑制设备工作。
4、发明人发现,上述机器人只是单纯的应用于建筑工地的巡检,缺乏对机器人的精确导航控制,进而无法实现对各楼宇各楼层施工进度的多轮次进度巡检;而在楼层的建筑施工的过程中,存在正在施工且未施工完成的墙体或者柱体,采用固定的机器人巡检站点无法达到最优工作效率,而采用实时更新的站点则存在算力需求较大成本较高的问题。
技术实现思路
1、为了解决现有技术的不足,本发明提供了一种用于建筑工地的机器人导航控制方法及系统,通过对缺失位置的重复扫描,结合机器人巡检站点的优化,实现了机器人的精准导航控制,提高了对施工区域的扫描建图精度,进而提高了巡检结果的精度。
2、为了实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供了一种基于bim的建筑工地机器人巡检导航控制方法。
4、一种基于bim的建筑工地机器人巡检导航控制方法,应用于机器人,所述机器人搭载有控制终端以及与控制终端通信连接的三维激光扫描仪,包括以下过程:
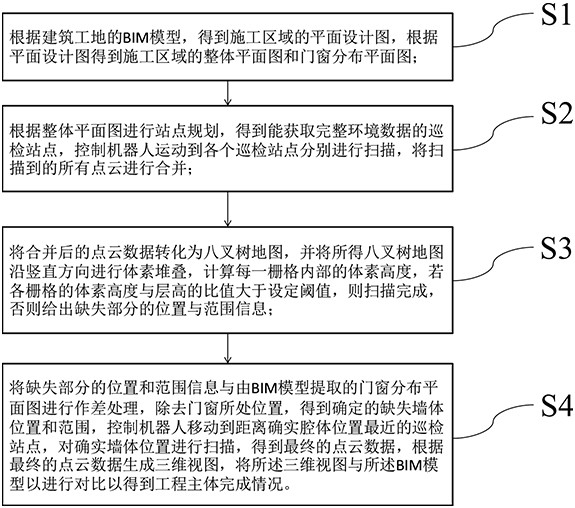
5、根据建筑工地的bim模型,得到施工区域的平面设计图,根据平面设计图得到施工区域的整体平面图和门窗分布平面图;
6、根据整体平面图进行站点规划,得到能获取完整环境数据的巡检站点,控制机器人运动到各个巡检站点分别进行扫描,将扫描到的所有点云进行合并;
7、将合并后的点云数据转化为八叉树地图,并将所得八叉树地图沿竖直方向进行体素堆叠,计算每一栅格内部的体素高度,若各栅格的体素高度与层高的比值大于设定阈值,则扫描完成得到最终的点云数据,否则给出缺失部分的位置与范围信息;
8、将缺失部分的位置和范围信息与由bim模型提取的门窗分布平面图进行作差处理,除去门窗所处位置,得到确定的缺失墙体位置和范围,控制机器人移动到距离缺失墙体位置最近的巡检站点,对缺失墙体位置进行扫描,得到最终的点云数据,根据最终的点云数据生成三维视图,将所述三维视图与所述bim模型进行对比以得到工程主体完成情况。
9、作为本发明第一方面进一步的限定,控制机器人运动到各个巡检站点分别进行扫描,对任意两个站点之间的机器人导航控制,包括:
10、确定起点位置和终点位置,机器人从起点位置开始扫描并构建起点位置和终点位置之间的栅格地图;
11、计算栅格地图上的每个节点的消耗,按照总消耗最小为目标将起点位置与终点位置之间的节点连接,得到按照总消耗从小到大排序的路径集合,选取路径集合中距离障碍物区域最大的路径作为最优路径。
12、作为本发明第一方面更进一步的限定,每个节点的消耗,包括:距离消耗、时间消耗以及安全风险因子的加和。
13、作为本发明第一方面进一步的限定,根据整体平面图进行站点规划,得到能获取完整环境数据的巡检站点,包括:
14、将建筑平面图的房间进行分割,得到多个离散的建筑空间;
15、在每个建筑空间的中心位置布置初始站点,以各初始规划站点为圆心以探测距离为半径画圆,对各圆内的备用站点进行视线检测和碰撞检测,获得每个初始规划站点的候选扫描站点的点集;
16、确定扫描顺序后,对相邻两个初始两站点s1和s2的候选扫描点集中各点对应的扫描区域,分别进行遍历交叉,计算各交叉面积与初始站点s2扫描面积的比值,选取所述比值大于设定阈值时对应的点对作为两个初始两站点s1和s2的规划站点;
17、对后续各站点依次执行上述操作,直至到达最后一个站点,完成各个扫描站点的规划。
18、作为本发明第一方面更进一步的限定,若某个初始规划站点所形成的交叉面积比值超过设定阈值,则依然以初始规划站点作为更新后的规划站点。
19、作为本发明第一方面进一步的限定,将所述三维视图与所述bim模型进行对比以得到工程完成情况,包括:
20、根据所述三维视图与所述bim模型对应的三维视图的对比,得到缺失部分占bim模型对应的三维视图的比例,根据所述比例的大小衡量工程主体的完成情况。
21、第二方面,本发明提供了一种基于bim的建筑工地机器人巡检导航控制系统。
22、一种基于bim的建筑工地机器人巡检导航控制系统,应用于机器人,所述机器人搭载有控制终端以及与控制终端通信连接的三维激光扫描仪,利用本发明第一方面所述的控制方法,包括:
23、bim模型分解单元,被配置为:根据建筑工地的bim模型,得到施工区域的平面设计图,根据平面设计图得到施工区域的整体平面图和门窗分布平面图;
24、点云合并单元,被配置为:根据整体平面图进行站点规划,得到能获取完整环境数据的巡检站点,控制机器人运动到各个巡检站点分别进行扫描,将扫描到的所有点云进行合并;
25、缺失识别单元,被配置为:将合并后的点云数据转化为八叉树地图,并将所得八叉树地图沿竖直方向进行体素堆叠,计算每一栅格内部的体素高度,若各栅格的体素高度与层高的比值大于设定阈值,则扫描完成得到最终的点云数据,否则给出缺失部分的位置与范围信息;
26、施工评价单元,被配置为:将缺失部分的位置和范围信息与由bim模型提取的门窗分布平面图进行作差处理,除去门窗所处位置,得到确定的缺失墙体位置和范围,控制机器人移动到距离缺失墙体位置最近的巡检站点,对缺失墙体位置进行扫描,得到最终的点云数据,根据最终的点云数据生成三维视图,将所述三维视图与所述bim模型进行对比以得到工程主体完成情况。
27、第三方面,本发明提供了一种计算机设备,包括:处理器和计算机可读存储介质;
28、处理器,适于执行计算机程序;
29、计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序被所述处理器执行时,实现如本发明第一方面所述的基于bim的建筑工地机器人巡检导航控制方法。
30、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序适于被处理器加载并执行如本发明第一方面所述的基于bim的建筑工地机器人巡检导航控制方法。
31、第五方面,本发明提供了一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时,实现如本发明第一方面所述的基于bim的建筑工地机器人巡检导航控制方法。
32、与现有技术相比,本发明的有益效果是:
33、1、本发明创新性的提出了一种用于建筑工地的机器人导航控制策略,通过对缺失位置的重复扫描,结合机器人巡检站点的优化,实现了机器人的精准导航控制,提高了对施工区域的扫描建图精度,进而提高了巡检结果的精度。
34、2、本发明将合并后的点云数据转化为八叉树地图,并将所得八叉树地图沿竖直方向进行体素堆叠,计算每一栅格内部的体素高度,根据各栅格的体素高度与层高的比值同设定阈值的对比,得到缺失部分的位置与范围信息,提高了扫描结果的准确性。
35、3、本发明根据整体平面图进行站点规划,得到能获取完整环境数据的巡检站点,采用最佳的巡检站点进行扫描,极大的提高了扫描效率。
36、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!