欠驱动自主水下车辆最优轨迹跟踪控制的方法
本发明涉及自主水下机器人轨迹跟踪控制,尤其涉及一种欠驱动自主水下车辆的最优轨迹跟踪控制的方法。
背景技术:
1、欠驱动自主水下车辆是无人水下航行器中一种重要的无缆线式自主水下装备。由于脱离了缆线的束缚,不依赖母船提供动力和控制等指令条件,欠驱动自主水下车辆具有机动性强、活动范围大、作业效率高、隐蔽性强、搭载方便等特点,并且具有自主规划、自主控制和自主导航能力。目前,欠驱动自主水下车辆广泛用于执行各种民用和军事任务,如海上石油和天然气勘探和开采、海底管道检测、海洋测绘、海洋战场侦察等。
2、在欠驱动自主水下车辆进行基础作业时,通常需要其执行轨迹跟踪控制任务。轨迹跟踪控制旨在控制自主水下车辆到达并跟踪一条时变的参数化轨迹,对收敛时间具有强约束,要求自主水下车辆的实际轨迹快速收敛到期望轨迹。尽管传统的轨迹跟踪控制方法在理想情况下可以实现预设的控制目标,但这些方法忽略了动力学模型的不确定性甚至忽略了外界环境的扰动,这使得设计的控制器缺乏灵活性以及自适应性,限制了控制器在实际工程中的应用。
技术实现思路
1、本发明提供一种欠驱动自主水下车辆的最优轨迹跟踪控制的方法,以克服上述技术问题。
2、为了实现上述目的,本发明的技术方案是:
3、一种欠驱动自主水下车辆的最优轨迹跟踪控制的方法,包括以下步骤:
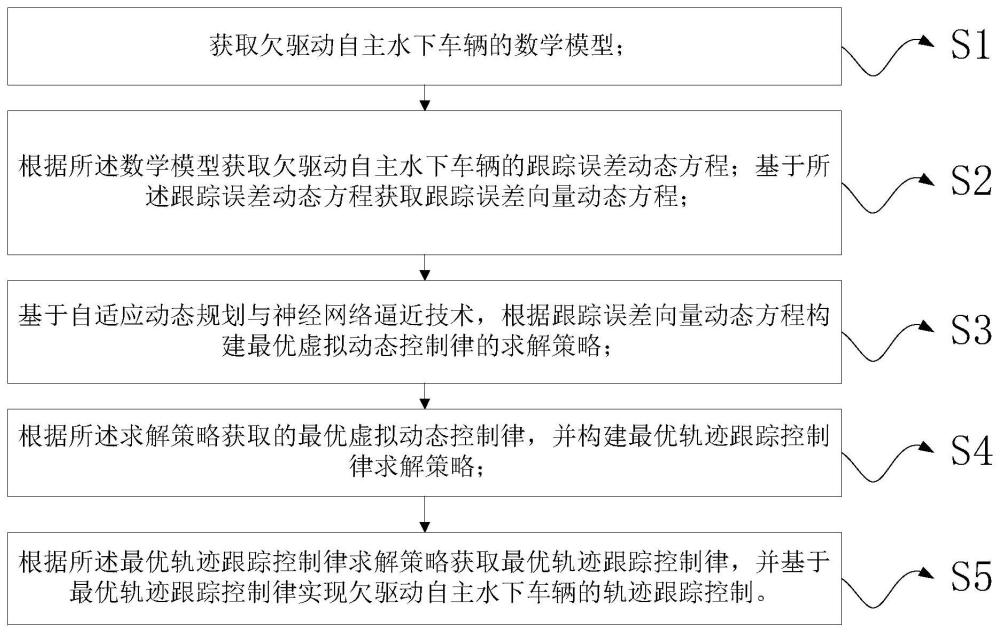
4、s1:获取欠驱动自主水下车辆的数学模型;
5、s2:根据所述数学模型获取欠驱动自主水下车辆的跟踪误差动态方程;基于所述跟踪误差动态方程获取跟踪误差向量动态方程;
6、s3:基于自适应动态规划与神经网络逼近技术,根据跟踪误差向量动态方程构建最优虚拟动态控制律的求解策略;
7、s4:根据所述求解策略获取的最优虚拟动态控制律,并构建最优轨迹跟踪控制律求解策略;
8、s5:根据所述最优轨迹跟踪控制律求解策略获取最优轨迹跟踪控制律,并基于最优轨迹跟踪控制律实现欠驱动自主水下车辆的轨迹跟踪控制。
9、进一步的,所述s2具体包括以下步骤:
10、s21:定义自主水下车辆的期望轨迹pd(t)=[xd(t),yd(t),zd(t)]t,其中xd(t)表示自主水下车辆在x轴方向的期望位置;yd(t)表示自主水下车辆在y轴方向的期望位置;zd(t)表示自主水下车辆在z轴方向的期望位置;
11、s22:根据所述数学模型与自主水下车辆的期望轨迹获取位置误差,以获取轨迹跟踪误差向量;
12、所述位置误差的表达式为
13、ex(t)=x-xd(t),ey(t)=y-yd(t),ez(t)=z-zd(t)
14、式中:ex(t)表示位置横坐标误差;ey(t)表示位置纵坐标误差;ez(t)表示位置垂向坐标误差;
15、s23:根据所述位置误差获取轨迹跟踪误差向量的水平面投影向量ed(t),并根据所述水平面投影向量ed(t)获取垂直平面投影向量eo(t);
16、所述水平面投影向量ed(t)的表达式为:
17、所述垂直平面投影向量eo(t)的表达式为
18、
19、式中:ψ(t)表示自主水下车辆的偏航角;ψe表示自主水下车辆前进方向与轨迹跟踪误差向量在水平面上投影的夹角;表示偏航角ψ(t)的正弦值;表示偏航角ψ(t)的余弦值;表示夹角ψe的正弦值;
20、s24:根据所述水平面投影向量ed(t)与垂直平面投影向量eo(t)获取欠驱动自主水下车辆的跟踪误差动态方程;
21、所述跟踪误差动态方程的表达式为
22、
23、
24、
25、式中:表示水平面投影向量ed(t)的一阶导;表示垂直平面投影向量eo(t)的一阶导;表示位置垂向坐标误差ez(t)的一阶导;表示cos(ψ+ψe)为自主水下车辆的偏航角ψ(t)与夹角ψe之和的余弦值;表示sin(ψ+ψe)为自主水下车辆的偏航角ψ(t)与夹角ψe之和的正弦值。
26、s25:定义欠驱动自主水下车辆的跟踪误差向量为e1=[ed,ez,eo]t与虚拟动态控制律为va=[u,v,ω]t;并根据所述跟踪误差动态方程获得跟踪误差向量动态方程;
27、所述跟踪误差向量动态方程的表达式为
28、
29、式中:
30、均表示中间参量矩阵。
31、进一步的,s3中构建的所述最优虚拟动态控制律的求解策略具体为
32、s31:基于自适应动态规划技术,根据所述跟踪误差向量动态方程获取第一性能指标函数v(e1),所述第一性能指标函数v(e1)的表达式为
33、
34、式中:τ=(τx,τz,τn)表示欠驱动自主水下车辆控制系统的控制输入;表示跟踪误差向量e1的转置;表示虚拟动态控制律va的转置;
35、s32:根据所述跟踪误差向量动态方程与第一性能指标函数v(e1),获取第一哈密顿函数;
36、所述第一哈密顿函数h1的表达式为
37、
38、式中:表示性能指标函数v(e1)对e1的偏导数;
39、令则获得最优虚拟动态控制律
40、s33:由于所述第一性能指标函数v(e1)与最优虚拟动态控制律为未知且连续的函数,则利用神经网络的通用近似特性进行逼近,近似获取未知且连续的第一性能指标函数与最优虚拟动态控制律;
41、所述神经网络的表达式为
42、
43、
44、式中:i表示自适应动态规划的第i次迭代过程;表示第i步迭代的神经网络的权值;表示神经网络激活函数;vi(e1)表示第i次迭代时的第一性能指标函数;va,i表示第i次迭代时的虚拟动态控制律;表示第i次迭代时第一性能指标函数对e1的偏导数;
45、由神经网络近似特性获取的第一近似误差ε1为
46、
47、s34:根据第一近似误差ε1定义第一误差函数并根据所述第一误差函数的函数值对神经网络的第一网络权值进行迭代更新;
48、所述第一网络权值的迭代更新公式为
49、式中:表示更新后的第一网络权值,即第i+1次迭代神经网络的第一网络权值;α表示神经网络的学习律;
50、s35:判断当前第一网络权值wv,i+1与上一次迭代更新的第一网络权值wv,i的误差值,是否超过预设误差阈值ε,当||wv,i+1-wv,i||≤ε时,则停止迭代,当前第一网络权值wv,i+1即为第一期望权重
51、当||wv,i+1-wv,i||>ε时,则重复执行s34;
52、s36:根据所述第一期望权重获取最优虚拟动态控制律
53、进一步的,所述s4具体包括以下步骤:
54、s41:获取欠驱动自主水下车辆的动力学方程,所述欠驱动自主水下车辆的动力学方程的表达式为
55、
56、式中:m表示系统惯性矩阵;τ欠驱动自主水下车辆控制系统的控制输入;与表示中间参数矩阵;g表示静水恢复力向量;
57、s42:定义欠驱动自主水下车辆的动力学跟踪误差并根据所述动力学跟踪误差e2获取第二性能指标函数v(e2);
58、所述第二性能指标函数v(e2)的表达式为:
59、s43:根据欠驱动自主水下车辆的动力学方程与第二性能指标函数v(e2),获取第二哈密顿函数;
60、所述第二哈密顿函数的表达式为
61、
62、式中:表示性能指标函数v(e2)对e2的偏导数;
63、令则获得最优轨迹跟踪控制律
64、s44:由于所述第二性能指标函数v(e2)与最优轨迹跟踪控制律为未知且连续的函数,则利用神经网络的通用近似特性进行逼近,近似获取未知且连续的第二性能指标函数与最优轨迹跟踪控制律;
65、所述神经网络的表达式为
66、
67、
68、式中:表示神经网络激活函数;vi(e2)表示第i次迭代时的第二性能指标函数v(e2);τi表示第i次迭代的轨迹跟踪控制律;表示第i次迭代的神经网络的第二网络权值;
69、由神经网络近似特性获取的第二近似误差ε2为
70、
71、s45:根据第二近似误差ε2定义第二误差函数并根据所述第二误差函数的函数值对神经网络的第二网络权值进行迭代更新;
72、所述第二网络权值的迭代更新公式为
73、式中:wτ,i+1表示更新后的第二网络权值,即第i+1次迭代神经网络的第二网络权值;
74、s46:判断当前第二网络权值wτ,i+1与上一次迭代更新的第二网络权值wτ,i的误差值,是否超过预设误差阈值ε,当||wτ,i+1-wτ,i||≤ε时,则停止迭代,当前第二网络权值wτ,i+1即为第二期望权重w*;
75、当||wτ,i+1-wτ,i||>ε时,则重复执行s45;
76、s47:根据所述第二期望权重w*获取最优虚拟动态控制律
77、进一步的,s1中获取的所述欠驱动自主水下车辆的数学模型的表达式为
78、
79、
80、
81、
82、
83、
84、
85、
86、式中:x,y,z分别表示自主水下车辆在惯性坐标系下的位置横坐标、位置纵坐标以及位置垂向坐标;φ,θ,ψ分别表示自主水下车辆的横摇角、纵倾角以及艏向角;u表示自主水下车辆沿x轴方向的线速度;v表示自主水下车辆沿y轴方向的线速度;ω表示自主水下车辆沿z轴方向的线速度;r表示自主水下车辆艏摇角速度;m11,m22,m33以及m44均表示设置的惯性矩阵参数;w与b分别表示自主水下车辆的重力与浮力;xu,xu|u|,yv,yv|v|,zω,zω|ω|,nr以及nr|r|均表示负的水动力阻尼系数;τx,τz以及τn分别表示纵荡方向、垂荡方向以及艏摇方向设置的推进器产生的力与力矩。
87、有益效果:本发明提供了一种欠驱动自主水下车辆的最优轨迹跟踪控制的方法,根据数学模型构建欠驱动自主水下车辆的跟踪误差动态方程,以获取跟踪误差向量动态方程;并基于自适应动态规划与神经网络逼近技术,根据跟踪误差向量动态方程构建最优虚拟动态控制律的求解策略;根据最优虚拟动态控制律构建最优轨迹跟踪控制律求解策略,以获取最优轨迹跟踪控制律实现欠驱动自主水下车辆的轨迹跟踪控制。本发明通过智能控制方法中的自适应动态规划方法将最优控制求解与神经网络强化学习相结合,具有不依赖系统模型且对模型不确定性及干扰具有较强的鲁棒性,解决了存在模型参数未知与扰动以及执行器故障等情况下的自主水下车辆的轨迹跟踪控制问题,提高了欠驱动自主水下车辆的在轨迹跟踪过程中的控制精度。
- 还没有人留言评论。精彩留言会获得点赞!