一种针对异构机载雷达信号的无人机控制方法和系统与流程
本技术涉及机载雷达无人机,尤其涉及一种针对异构机载雷达信号的无人机控制方法和系统。
背景技术:
1、随着机载雷达无人机技术的快速发展,机载雷达无人机在任务中的应用被广泛关注和研究。机载雷达无人机朝灵活部署、机动使用的方向快速发展,机载雷达无人机的地面发射作为主要的出动形式被广泛应用。
2、在电子对抗的实际应用中,经常需要多机动平台协同作战,因此可以考虑将机载雷达进行组网。机载雷达组网兼具高机动性和协同工作能力,因此信息获取能力和目标处理能力会得到显著的提升。雷达工作时的平均功率较大,然而很多机动平台没有持续的控制准确度供应,即便是机载雷达组网,也面临着控制准确度不足的问题。因此,针对机载雷达组网,就迫切需要一种针对异构机载雷达信号的无人机控制方法,在保证任务有效完成的情况下,提升使用的控制准确度。
技术实现思路
1、为实现上述目的,本技术提供如下技术方案:
2、根据本发明第一方面,本发明请求保护一种针对异构机载雷达信号的无人机控制方法,其特征在于,包括:
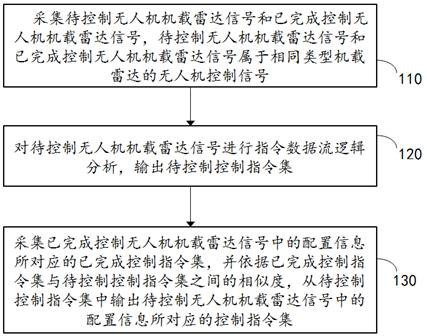
3、采集待控制无人机机载雷达信号和已完成控制无人机机载雷达信号,所述待控制无人机机载雷达信号和已完成控制无人机机载雷达信号属于相同类型机载雷达的无人机控制信号;
4、对所述待控制无人机机载雷达信号进行指令数据流逻辑分析,输出待控制控制指令集;
5、采集所述已完成控制无人机机载雷达信号中的配置信息所对应的已完成控制指令集,并依据所述已完成控制指令集与所述待控制控制指令集之间的相似度,从所述待控制控制指令集中输出所述待控制无人机机载雷达信号中的配置信息所对应的控制指令集。
6、进一步的,所述已完成控制指令集与所述待控制控制指令集之间的相似度的输出步骤包括:
7、依据所述已完成控制指令集在所述已完成控制无人机机载雷达信号中对应的控制记录,输出所述已完成控制指令集的优先级;
8、依据所述已完成控制指令集的优先级,所述已完成控制指令集的情报特征以及所述待控制控制指令集的情报特征,输出所述已完成控制指令集与所述待控制控制指令集之间的相似度。
9、进一步的,所述控制记录包括控制时长和控制频率;
10、所述依据所述已完成控制指令集在所述已完成控制无人机机载雷达信号中对应的控制记录,输出所述已完成控制指令集的优先级,包括:
11、依据所述已完成控制指令集在所述已完成控制无人机机载雷达信号中对应的控制时长,输出所述已完成控制指令集的第一可信值;
12、依据所述已完成控制指令集在所述已完成控制无人机机载雷达信号中对应的控制频率,输出所述已完成控制指令集的第二可信值;
13、依据所述第一可信值,以及所述第二可信值,输出所述已完成控制指令集的优先级。
14、进一步的,所述依据所述已完成控制指令集的优先级,所述已完成控制指令集的情报特征以及所述待控制控制指令集的情报特征,输出所述已完成控制指令集与所述待控制控制指令集之间的相似度,包括:
15、依据所述已完成控制指令集的优先级,以及所述已完成控制指令集的情报特征,输出所述已完成控制指令集的加权特征;
16、对所述待控制控制指令集的情报特征与所述已完成控制指令集的加权特征进行注意力计算,输出所述已完成控制指令集与所述待控制控制指令集之间的相似度;
17、所述对所述待控制无人机机载雷达信号进行指令数据流逻辑分析,输出待控制控制指令集,包括:
18、对所述待控制无人机机载雷达信号进行指令数据流解析,输出多个待控制指令数据流;
19、将属于相同类型的待控制指令数据流划分为一组,输出多个待控制指令数据流组;
20、依据各待控制指令数据流组中指令数据流类型,从各待控制指令数据流组中输出相匹配的待控制指令数据流组;
21、在相匹配的待控制指令数据流组间进行指令数据流逻辑分析,输出所述待控制控制指令集。
22、进一步的,所述对所述待控制无人机机载雷达信号进行指令数据流解析,输出多个待控制指令数据流,包括:
23、在多个预定指令数据流类型下,分别对所述待控制无人机机载雷达信号进行指令数据流解析,输出各预定指令数据流类型对应的待控制指令数据流;
24、所述已完成控制无人机机载雷达信号是预定时段内对应的无人机控制信号。
25、根据本发明第二方面,本发明请求保护一种针对异构机载雷达信号的无人机控制系统,其特征在于,包括:
26、采集模块,采集待控制无人机机载雷达信号和已完成控制无人机机载雷达信号,所述待控制无人机机载雷达信号和已完成控制无人机机载雷达信号属于相同类型机载雷达的无人机控制信号;
27、分析模块,对所述待控制无人机机载雷达信号进行指令数据流逻辑分析,输出待控制控制指令集;
28、输出模块,采集所述已完成控制无人机机载雷达信号中的配置信息所对应的已完成控制指令集,并依据所述已完成控制指令集与所述待控制控制指令集之间的相似度,从所述待控制控制指令集中输出所述待控制无人机机载雷达信号中的配置信息所对应的控制指令集。
29、进一步的,所述输出模块,还包括:
30、依据所述已完成控制指令集在所述已完成控制无人机机载雷达信号中对应的控制记录,输出所述已完成控制指令集的优先级;
31、依据所述已完成控制指令集的优先级,所述已完成控制指令集的情报特征以及所述待控制控制指令集的情报特征,输出所述已完成控制指令集与所述待控制控制指令集之间的相似度。
32、进一步的,所述控制记录包括控制时长和控制频率;
33、所述依据所述已完成控制指令集在所述已完成控制无人机机载雷达信号中对应的控制记录,输出所述已完成控制指令集的优先级,包括:
34、依据所述已完成控制指令集在所述已完成控制无人机机载雷达信号中对应的控制时长,输出所述已完成控制指令集的第一可信值;
35、依据所述已完成控制指令集在所述已完成控制无人机机载雷达信号中对应的控制频率,输出所述已完成控制指令集的第二可信值;
36、依据所述第一可信值,以及所述第二可信值,输出所述已完成控制指令集的优先级。
37、进一步的,所述依据所述已完成控制指令集的优先级,所述已完成控制指令集的情报特征以及所述待控制控制指令集的情报特征,输出所述已完成控制指令集与所述待控制控制指令集之间的相似度,包括:
38、依据所述已完成控制指令集的优先级,以及所述已完成控制指令集的情报特征,输出所述已完成控制指令集的加权特征;
39、对所述待控制控制指令集的情报特征与所述已完成控制指令集的加权特征进行注意力计算,输出所述已完成控制指令集与所述待控制控制指令集之间的相似度;
40、所述对所述待控制无人机机载雷达信号进行指令数据流逻辑分析,输出待控制控制指令集,包括:
41、对所述待控制无人机机载雷达信号进行指令数据流解析,输出多个待控制指令数据流;
42、将属于相同类型的待控制指令数据流划分为一组,输出多个待控制指令数据流组;
43、依据各待控制指令数据流组中指令数据流类型,从各待控制指令数据流组中输出相匹配的待控制指令数据流组;
44、在相匹配的待控制指令数据流组间进行指令数据流逻辑分析,输出所述待控制控制指令集。
45、进一步的,所述对所述待控制无人机机载雷达信号进行指令数据流解析,输出多个待控制指令数据流,包括:
46、在多个预定指令数据流类型下,分别对所述待控制无人机机载雷达信号进行指令数据流解析,输出各预定指令数据流类型对应的待控制指令数据流;
47、所述已完成控制无人机机载雷达信号是预定时段内对应的无人机控制信号。
48、本技术涉及机载雷达无人机技术领域,尤其涉及一种针对异构机载雷达信号的无人机控制方法和系统,采集待控制和已完成控制无人机机载雷达信号,二者属于相同类型机载雷达的无人机控制信号;对待控制无人机机载雷达信号进行指令数据流逻辑分析,输出待控制控制指令集;采集已完成控制无人机机载雷达信号中的配置信息所对应的已完成控制指令集,并依据已完成控制指令集与待控制控制指令集之间的相似度,从待控制控制指令集中输出待控制无人机机载雷达信号中的配置信息所对应的控制指令集。本发明可以有效对搭载异构类型的机载雷达信号的无人机进行准确控制,对控制指令给出相对符合控制需求的反馈结果。
- 还没有人留言评论。精彩留言会获得点赞!