一种超声波传感器自动泊车的长宽比例相似度计算方法与流程
1.本发明属于自动泊车技术领域,具体涉及一种超声波传感器自动泊车的长宽比例相似度计算方法。
背景技术:
2.超声波传感器是自动泊车系统中常用的传感器之一,超声波能够准确探测出障碍物的距离,但是不能输出具体的障碍物类型。现有的超声波车位探测的边界采用超声探测的跳变点之间的距离变化来确定车位边界,现有的超声波雷达获取目标车位上边缘和下边缘的障碍物形状类型,障碍物形状分为方形、圆形和未知形三类,根据目标车位左右障碍物之间的距离、目标车位左右障碍物的补偿值计算目标车位长度,车位左右侧障碍物的边沿回波信号拟合成二次多项式的表征形式,并将二次多项式的二次项系数作为边沿回波信号的特征值,根据该特征值,确定待测障碍物边沿位置的测量补偿值,进而根据待测障碍物边沿位置的初始测量值和测量补偿值,计算得到车位长度,在实际场景中,不同的障碍物类型对超声波的反射信号不同,造成不同障碍物类型的跳变点具有不稳定性,难以得到准确的车位边界探测精度。
3.因此,现存在的超声波传感器的计算方法还存在以下问题:
4.1.对障碍物分类基本是方形、圆形、未知型三类,类别太少,实际场景中每一类包含的障碍物太复杂,分类的作用对后续计算车位边界作用并非关键点;
5.2.车位补偿需要每次根据车位轮廓特征分别计算补偿值,相似轮廓造成不必要的计算;
6.3.超声车位左右边界探测精度不高。
技术实现要素:
7.本发明的目的在于提供一种超声波传感器自动泊车的长宽比例相似度计算方法,以解决上述背景技术中提出现有的一种超声波传感器自动泊车的长宽比例相似度计算方法在使用过程中,对障碍物分类基本是方形、圆形、未知型三类,类别太少,实际场景中每一类包含的障碍物太复杂,车位补偿需要每次根据车位轮廓特征分别计算补偿值,相似轮廓造成不必要的计算,超声车位左右边界探测精度不高的问题。
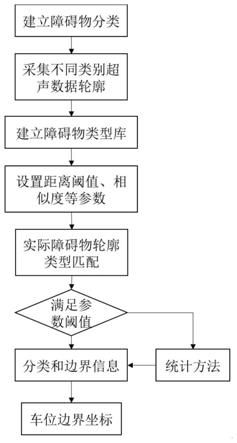
8.为实现上述目的,本发明提供如下技术方案:一种超声波传感器自动泊车的长宽比例相似度计算方法,包括s1.建立障碍物分类、s2.采集不同障碍物数据轮廓并建立障碍物类型库、s3.设置轮廓相似度参数和s4.障碍物类型匹配,具体步骤如下:
9.s1.建立障碍物分类;
10.根据实际场景中,车位障碍物有车辆、柱子、墙壁等,按照障碍物类型的轮廓进行划分类别,划分为平面型、方形、圆柱型、稍尖圆形、圆形带小弧度型和平面带大弧度型。
11.s2.采集不同障碍物数据轮廓并建立障碍物类型库;
12.采集不同类型障碍物的超声轮廓点信息作为障碍物类型库,同时记录障碍物对应
的左右边界坐标作为该障碍物类型的真实边界,建立不同障碍物类型在不同车速下的障碍物类型库;
13.s3.设置轮廓相似度参数;
14.表示类型库的超声轮廓与实际轮廓的匹配程度,轮廓点之间的欧式距离,计算过程如下:
15.轮廓库边界点
①③
坐标(x1,y1)、(x3,y3),计算轮廓的长宽大小,
△
x=|x1
‑
x3|,
△
y=|y1
‑
y3|,计算长宽比例α=
△
x/
△
y。分别计算实际轮廓长宽比例和轮廓库轮廓长宽比例,计算比例差值,设定阈值δ,经验优选值为δ
±
0.1;
16.s4.障碍物类型匹配;
17.通过计算不同的相似度参数和相应阈值得到类型匹配,进行超声波车位探测,探测车位左右障碍物,得到障碍物实际轮廓点信息,与s2中障碍物类型库的类型进行匹配,小于相似度阈值的,可得到车位两侧障碍物类型和边界值,计算出准确的超声车位信息,输出车位边界坐标;
18.若实际测试的轮廓相似度均不满足阈值,则采用统计方法,直接计算整体轮廓的宽度和长度,计算长度
△
l和宽度差
△
w,d=
△
l+
△
w,选择所有轮廓类型中宽度和长度最接近的类型,实际障碍物坐标同理由类型得出,得到实际车位边界坐标。
19.具体的,步骤s1中,墙壁为平面型,柱子分为方型、圆柱型,车辆种类较多,参考市面常见车辆种类,分类依据为稍尖圆型、方型、平带小弧度型、平面带大弧度型等。
20.与现有技术相比,本发明的有益效果是:
21.1、通过建立障碍物分类,将障碍物划分为平面型、方形、圆柱型、稍尖圆形、圆形带小弧度型和平面带大弧度型,对实际场景中的常见障碍物进行划分,方便后续障碍物类型匹配,方便了计算。
22.2、直接用实际轮廓点与障碍物类型库的类型计算相似度进行匹配,利用计算长宽比例的方式,简化了障碍物分类过程。
23.3、匹配后的障碍物类型带有真实边界坐标,根据车位左右障碍物类别得到实际车位边界坐标,提高了超声波车位的识别精度。
附图说明
24.图1为本发明的整体流程图;
25.图2为本发明的步骤s1中的障碍物类别图;
26.图3为本发明的步骤s2中的采集示意图;
27.图4为本发明的步骤s3中的轮廓匹配度计算示意图。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.请参阅图1
‑
4,本发明提供一种技术方案:一种超声波传感器自动泊车的长宽比例
相似度计算方法,包括s1.建立障碍物分类、s2.采集不同障碍物数据轮廓并建立障碍物类型库、s3.设置轮廓相似度参数和s4.障碍物类型匹配,具体步骤如下:
30.s1.建立障碍物分类;
31.根据实际场景中,车位障碍物有车辆、柱子、墙壁等,按照障碍物类型的轮廓进行划分类别,划分为平面型、方形、圆柱型、稍尖圆形、圆形带小弧度型和平面带大弧度型;
32.s2.采集不同障碍物数据轮廓并建立障碍物类型库;
33.采集不同类型障碍物的超声轮廓点信息作为障碍物类型库,同时记录障碍物对应的左右边界坐标作为该障碍物类型的真实边界,建立不同障碍物类型在不同车速下的障碍物类型库;
34.s3.设置轮廓相似度参数;
35.表示类型库的超声轮廓与实际轮廓的匹配程度,轮廓点之间的欧式距离,计算过程如下:
36.轮廓库边界点
①③
坐标(x1,y1)、(x3,y3),计算轮廓的长宽大小,
△
x=|x1
‑
x3|,
△
y=|y1
‑
y3|,计算长宽比例α=
△
x/
△
y。分别计算实际轮廓长宽比例和轮廓库轮廓长宽比例,计算比例差值,设定阈值δ,经验优选值为δ
±
0.2;
37.s4.障碍物类型匹配;
38.通过计算不同的相似度参数和相应阈值得到类型匹配,进行超声波车位探测,探测车位左右障碍物,得到障碍物实际轮廓点信息,与s2中障碍物类型库的类型进行匹配,小于相似度阈值的,可得到车位两侧障碍物类型和边界值,计算出准确的超声车位信息,输出车位边界坐标;
39.若实际测试的轮廓相似度均不满足阈值,则采用统计方法,直接计算整体轮廓的宽度和长度,计算长度
△
l和宽度差
△
w,d=
△
l+
△
w,选择所有轮廓类型中宽度和长度最接近的类型,实际障碍物坐标同理由类型得出,得到实际车位边界坐标。
40.其中,步骤s1中,墙壁为平面型,柱子分为方型、圆柱型,车辆种类较多,参考市面常见车辆种类,分类依据为稍尖圆型、方型、平带小弧度型、平面带大弧度型等。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1