物体识别系统和物体识别方法与流程
1.本发明涉及物体识别系统和物体识别方法。
背景技术:
2.为了保障公共空间中的安全,对用监视摄像机获取的影像进行监 视,确定可疑物品或可疑人员这样的识别对象。以往,用监视摄像机 获取的影像的监视是由监视员目视进行的,存在能同时监视的影像的 数量存在限度等问题。针对这一点,近年来,使用机器学习等方法从 影像中自动地识别要求的识别对象的物体识别技术受到了关注。
3.使用机器学习的物体识别技术中,对于已设置的每个监视摄像机, 通过生成以显现了识别对象的大量图像数据为训练数据(学习用数据) 进行学习得到的已学习模型,能够精度良好地对识别对象进行识别。 但是,将以用特定监视摄像机获取的图像数据为训练数据生成的已学 习模型对于用新设置的监视摄像机这样的其他监视摄像机获取的图像 数据应用时,可能得到不适当的识别结果。
4.为了解决上述问题,考虑大量收集用其他监视摄像机获取的图像 数据作为训练数据,基于这些图像数据执行对于已学习模型的再学习。 但是,该方法中,存在收集训练数据耗费时间和成本的问题。
5.专利文献1中,公开了能够减少收集训练数据耗费的时间和成本 的物体识别系统。该物体识别系统是为了监视占据泊车空间的车辆而 识别车辆的系统,为了即使监视摄像机对于车辆的视点变化也适当地 确定车辆,而进行对用视点不同的监视摄像机获取的图像数据之间的 特征量的分布进行调整的领域自适应。因此,无需大量收集视点不同 的图像数据作为训练数据,所以能够减少收集训练数据耗费的时间和 成本。
6.现有技术文献
7.专利文献
8.专利文献1:美国专利申请公开第2019/0065853号说明书
技术实现要素:
9.发明要解决的课题
10.但是,领域自适应中,为了使已学习模型不依赖于摄像机的视点 等,而主要关注对图像的特征量的分布进行修正,所以并不保证能够 学习识别对象的细微差异。因此,在机场中的行李的提取处等中识别 个人拥有的各种箱包这样的任务等中,存在不能保障充分的识别精度 的风险。
11.本发明的目的在于提供一种能够减少收集训练数据耗费的时间和 成本、同时提高识别精度的物体识别系统和物体识别方法。
12.用于解决课题的技术方案
13.本发明的一个方式的物体识别系统,是一种能够确定对象图像数 据中显现的被拍摄体的物体识别系统,其中所述对象图像数据基于用 规定的摄影装置获取的图像数据
而得到,所述物体识别系统包括:从 所述对象图像数据中提取本质特征量的提取部,其中所述本质特征量 是与关于该对象图像数据中显现的被拍摄体的多个要素分别相关的多 个特征量中的、与独立于所述摄影装置的摄影条件的要素相关的特征 量;和比较部,其对所述本质特征量与作为从参考图像数据中提取出 的所述本质特征量的登记特征量进行比较,并基于该比较结果来确定 所述被拍摄体,其中所述参考图像数据是基于用不同于所述摄影装置 的其他摄影装置获取的图像数据而得到的。
14.发明效果
15.根据本发明,能够减少收集训练数据耗费的时间和成本,同时提 高识别精度。
附图说明
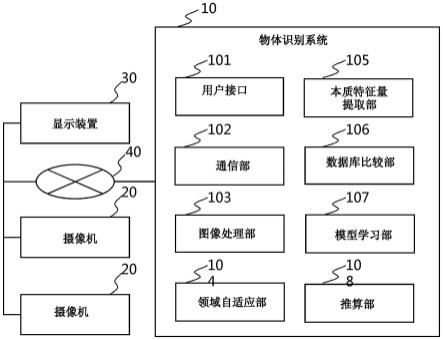
16.图1是表示本发明的一个实施方式的物体识别系统的功能结构的 图。
17.图2是表示本发明的一个实施方式的物体识别系统的硬件结构的 一例的图。
18.图3是表示应用本发明的一个实施方式的物体识别系统的应用环 境的一例的图。
19.图4是用于说明识别处理的一例的流程图。
20.图5是用于说明关于领域共同要素的处理的一例的图。
21.图6是用于说明领域自适应网络的学习方法的一例的图。
22.图7是用于说明关于本质特征量的处理的一例的图。
23.图8是表示要素分解网络的一例的图。
24.图9是表示显示装置中的检测结果的显示例的图。
25.图10是表示显示装置中的检测结果的其他显示例的图。
26.图11是用于说明构建数据库的构建处理的流程图。
具体实施方式
27.以下,对于本发明的实施方式参考附图进行说明。
28.图1是表示本发明的一个实施方式的物体识别系统的功能结构的 图。物体识别系统10与获取图像数据的摄影装置即摄像机20、和显示 各种信息的显示装置30经由网络40相互可通信地连接。图1的例子 中,示出了2个摄像机20、1个显示装置30,但摄像机20和显示装置 30的数量不限定于该例。另外,物理识别系统10、摄像机20和显示 装置30的连接方式可以是有线方式,也可以是无线方式。
29.物体识别系统10如图1所示,具有用户接口101、通信部102、 图像处理部103、领域自适应部104、本质特征量提取部105、数据库 比较部106、模型学习部107和推算部108。
30.用户接口101具有从用户接受各种信息的功能和对用户输出各种 信息的功能。
31.通信部102经由网络40与摄像机20和显示装置30这样的外部装 置通信。例如,通信部102从摄像机20接收图像数据、对显示装置30 发送显示信息。
32.图像处理部103对于用通信部102接收到的图像数据进行各种图 像处理。例如,图像处理部103进行从图像数据中提取表示显现了规 定被拍摄体的区域的部分图像数据的提取处理。另外,图像处理部103 也可以对于图像数据进行强调特定被拍摄体的强调处理。
33.领域自适应部104对于基于用具有相互不同的摄影条件(视野角 和背景等)的多个摄像机20分别获取的图像数据学习得到的领域自适 应网络,输入作为确定被拍摄体的
对象的图像数据即对象图像数据, 执行提取对象图像数据的领域共同要素的领域自适应处理。对象图像 数据是基于用摄像机20中的任一者获取的图像数据得到的数据,本实 施方式中,是图像处理部103用提取处理从图像数据中提取出的部分 图像数据。另外,领域共同要素是表示对于对象图像数据的各摄像机 20的摄影条件共同的特征的特征量,例如是向量信息。
34.本质特征量提取部105是从对象图像数据中,提取与关于该对象 图像数据中显现的被拍摄体即识别对象的多个要素分别相关的多个特 征量中的、与独立于获取该对象图像数据的摄像机20的摄影条件的要 素相关的特征量作为本质特征量的提取部。本质特征量例如是向量信 息。
35.数据库比较部106是对关于领域共同要素和本质特征量的数据库、 与用领域自适应部104和本质特征量提取部105提取出的领域共同要 素和本质特征量进行比较,基于其比较结果,确定对象图像数据中显 现的识别对象的比较部。
36.模型学习部107使用显现了规定对象物的图像数据作为训练数据, 生成学习了推算图像数据中是否显现了规定被拍摄体的功能的物体识 别模型。
37.推算部108使用用模型学习部107生成的物体识别模型,推算规 定输入图像数据中是否显现了规定对象物。
38.图2是表示物体识别系统10的硬件结构的一例的图。如图2所示, 物体识别系统10具有处理器151、存储器152、通信装置153、辅助存 储装置154、输入装置155和输出装置156,各硬件151~156经由系 统总线157相互可通信地连接。
39.处理器151通过读取计算机程序并执行该读取的计算机程序,而 实现图1所示的各功能部101~108。存储器152保存用处理器151执 行的计算机程序和处理器151中使用的各种数据。通信装置153与图1 所示的摄像机20和显示装置30这样的外部装置进行通信。辅助存储 装置154是hdd(hard disk drive)、ssd(solid state drive)和闪存 等,持久地存储各种数据。上述数据库例如存储在辅助存储装置154 中。输入装置155例如是键盘、鼠标和触摸面板等,接受用户的操作。 输出装置156例如是监视器和打印机等,对用户输出各种数据。
40.另外,用处理器151执行的计算机程序,可以记录在能够用计算 机读取的非暂时性的记录介质158中。记录介质158的种类并不特别 限定,例如是软盘、cd-rom、dvd-rom、硬盘、ssd、光盘、磁光 盘、cd-r、磁带或非易失性的存储卡等。另外,用计算机程序实现的 功能的至少一部分,例如也可以通过在集成电路中设计等而用硬件实 现。
41.另外,本系统可以是物理计算机系统(一个以上物理计算机),也 可以是在云平台这样的计算资源组(多个计算资源)上构建的系统。 计算机系统或计算资源组包括1个以上的接口装置(例如包括通信装 置和输入输出装置)、1个以上的存储装置(例如存储器(主存)和辅 助存储装置)和1个以上的处理器。
42.图3是表示应用物体识别系统10的应用环境的一例的图。图3中, 示出了在机场中的行李的提取处应用了物体识别系统10的例子。
43.在机场中的行李的提取处200,为了将用飞机搬运的行李即箱包 300交给拥有者,而设置了从库房搬运箱包300的输送带201。另外, 在输送带201的途中,设置了用于检查箱包300的内容物的检查装置 202。检查装置202例如是x线检查装置,无需打开箱包300地,获
取 显现了箱包300的内容物的透视图像数据。
44.物理识别系统10和显示装置30例如设置在机场的管理部门等中。 另外,摄像机20为了在图像数据中显现箱包300而设置在提取处200 等。图3的例子中,作为摄像机20设置了摄像机20a~20c。摄像机 20a和20b设置为能够拍摄输送带201上的箱包300。摄像机20c设 置为能够拍摄拥有者提取的箱包300。例如,摄像机20c设置为拍摄 输送带201附近的拥有者提取箱包300的状况,或者以俯瞰提取处200 整体的方式进行拍摄。另外,也可以适当追加摄像机20。
45.用检查装置202获取的透视图像数据被显示于显示装置30或物体 识别系统10的输出装置156。机场的监视员确认显示的透视图像数据, 在判断箱包300中装有刀具等危险物或可疑物品时,将该箱包300指 定为追踪对象。指定追踪对象的指定方法,例如可以举出从摄像机20a 获取的图像数据中,经由输入装置155指定在透视图像中显现了内容 物的箱包300的方法等。
46.该情况下,物体识别系统10将指定为追踪对象的箱包300设定为 指定被拍摄体。例如,物体识别系统对于识别箱包300的id,设定表 示是指定被拍摄体的信息。另外,关于id在后文中叙述。
47.另外,物体识别系统10执行从摄像机20b和20c获取的图像数据 中确定箱包300的识别处理,对于该识别处理的结果即识别结果,使 用用户接口101对输出装置156输出,或者使用通信部102对显示装 置30输出。此时,在所确定的箱包300与指定被拍摄体相同的情况下, 物体识别系统10对于原本的图像数据叠加识别结果,由此能够容易地 追踪指定的箱包300及其拥有者。
48.另外,物体识别系统10也可以不经由监视员地与检查装置202直 接协作。例如,物体识别系统10的推算部108使用将危险物和可疑物 品作为规定对象物的物体识别模型,推算透视图像数据中是否显现了 对象物。显现了对象物的情况下,推算部108将与显现了对象物的透 视图像数据对应的箱包300设定为指定被拍摄体。该情况下,能够减 少监视员的负担或监视员的数量,能够削减应用成本。
49.这样将物体识别系统10应用于行李的提取处的情况下,如用摄像 机20a和20b获取的图像数据一般能够大量收集以输送带为背景的图 像数据,但用摄像机20c获取的图像数据中,背景和视野角等摄影条 件与摄像机20c所设置在的提取处、和提取处内的设置位置等相应地 改变,所以难以大量收集同等的图像。因此,使用现有的机器学习的 方法时,例如在机场内设置了新的提取处的情况下,即使能够充分地 收集与用摄像机20a和20b获取的图像同等的图像,也可能不能充分 准备与用摄像机20c获取的图像同等的图像。以下,对于在这样的状 况下,也能够精度良好地对识别对象进行识别的物体识别系统10的动 作和功能等进行说明。
50.图4是用于说明物体识别系统10检测识别对象的识别处理的一例 的流程图。
51.识别处理中,首先,物体识别系统10的图像处理部103经由通信 部102获取用规定摄像机20(图3的例子中是新设置的摄像机20c) 获取的图像数据,从该图像数据中提取表示显现了规定被拍摄体(图3 的例子中是箱包300)的区域的部分图像数据作为对象图像数据(步骤 s301)。另外,提取对象图像数据的原始图像数据中显现了多个规定被 拍摄体的情况下,图像处理部103提取与该多个被拍摄体分别对应的 多个对象图像数据。
52.接着,领域自适应部104对于对象图像数据执行领域自适应处理, 从对象图像数据中提取领域共同要素(步骤s302)。数据库比较部106 对用领域自适应部104提取出的领域共同要素、与关于领域共同要素 的数据库即共同要素数据库进行比较(步骤s303)。
53.图5是用于更详细地说明步骤s302和s303的处理的图。
54.如图5所示,共同要素数据库500中,对于每个识别规定被拍摄 体即箱包300的id501,保存了从表示该箱包300的图像数据中提取出 的领域共同要素即登记共同要素502。提取登记共同要素502的图像数 据,是基于用与规定摄像机20即摄像机20c不同的摄像机20a和b 中的至少一者获取的图像数据得到的参考图像数据。另外,关于登记 共同要素502对共同要素数据库500的登记方法,使用图11在后文中 叙述。
55.首先,在步骤s302中,领域自适应部104将对象图像数据510输 入至学习了提取领域共同要素的功能的领域自适应网络520,由此从对 象图像数据510中提取领域共同要素530,将该领域共同要素530输入 至数据库比较部106。领域自适应网络520是基于用摄像机20a~20c 获取的图像数据学习得到的已学习模型。
56.图6是用于说明领域自适应网络520的学习方法的一例的图。如 图6所示,使领域自适应网络520进行学习时,将用与获取对象图像 数据的摄像机相同的摄像机20c所获取的新摄像机图像数据601、和 用摄像机20a和20b获取的旧摄像机图像602用作训练数据。新摄像 机图像数据601可以是少量的。旧摄像机图像数据602优选是大量的, 例如可以是能够使用的全部图像。
57.在领域自适应网络610的学习中,将新摄像机图像数据601和旧 摄像机图像数据602输入至学习前的领域自适应网络610,使用基于从 领域自适应网络610输出的领域共同要素611计算出的3个不同的损 失函数对领域自适应网络610的参数进行调整,由此生成已学习的领 域自适应网络610。
58.图6的例子中,3个损失函数是基于交叉熵的损失函数(crossentropy loss)、基于按d-sne(t-distributed stochastic neighborembedding)修正后的hausdorffian距离的损失函数(vat(virtualadversarial training)loss)、和基于判别结果的损失函数(discriminatorloss)。基于交叉熵的损失函数和基于按d-sne修正后的hausdorffian 距离的损失函数,是基于对分别根据新摄像机图像数据601和旧摄像 机图像数据602得到的领域共同要素611用分类器612分类得到的分 类结果hθ(xs)计算的。另外,基于判别结果的输出的损失函数,是基于 对分别根据新摄像机图像数据601和旧摄像机图像数据602得到的领 域共同要素611用判别器613判别得到的判别结果计算的。
59.返回图5的说明。数据库比较部106在步骤s303中,按每个id501 对领域共同要素530与共同要素数据库500中登记的登记共同要素502 进行比较,按每个id501计算出领域共同要素530与登记共同要素502 的相似度。数据库比较部106生成按每个id502表示这些相似度的信息 作为领域比较结果。相似度例如是欧几里得距离这样的传统的度量距 离。
60.返回图4的说明。数据库比较部106基于领域比较结果,判断是 否满足关于领域共同要素530与最类似于该领域共同要素530的登记 共同要素502的一致率的规定精度条件(步骤s304)。精度条件在本实 施方式中是最类似于领域共同要素530的登记共同要素502的相似度 高于第一阈值、且其次类似于领域共同要素的登记共同要素502低于 第二阈值。此时,相似度也可以归一化为0到1的范围的值。归一化 后的相似度越接近1,则表示越类
似。该情况下,第一阈值例如是0.8, 第二阈值小于第一阈值,例如是0.3。
61.另外,精度条件不限于上述例子,例如也可以是最类似于领域共 同要素530的登记共同要素502的相似度高于第一阈值等。
62.不满足精度条件的情况下,本质特征量提取部105对于对象图像 数据执行本质特征量提取处理,从对象图像数据中提取本质特征量(步 骤s305)。数据库比较部106对用本质特征量提取部105提取出的本质 特征量、与关于本质特征量的数据库即本质特征量数据库进行比较(步 骤s306)。
63.图7是用于更详细地说明步骤s305和306的处理的图。
64.如图7所示,本质特征量数据库700中,对于每个识别规定被拍 摄体即箱包300的id701,保存了从表示该箱包300的图像数据中提取 出的本质特征量即登记特征量702。id701可以是与图5所示的id501 共同的。提取登记特征量702的图像数据,是基于用与规定摄像机20 即摄像机20c不同的摄像机20a和b中的至少一者获取的图像数据得 到的参考图像数据。另外,关于登记特征量702对本质特征量数据库 700的登记方法,使用图11在后文中叙述。
65.首先,在步骤s305中,本质特征量提取部105将对象图像数据510 输入至学习了提取要素分解特征量的功能的要素分解网络720,由此从 对象图像数据510中提取要素分解特征量730。
66.要素分解网络720例如是自编码器神经网络。自编码器神经网络 构成为具有解开与关于图像数据中显现的被拍摄体的多个要素分别相 关的特征量的纠缠的要素分解(disentanglement)特性,能够按要素分 别地输出包括特征量的要素分解特征量。要素分解网络720(自编码器 神经网络)例如由已学习的β-vae(valuable auto encoder)的组合构 成。
67.图8是表示由已学习的β-vae的组合构成的要素分解网络的一例 的图。已知β-vae具有要素分解特性,例如能够使其学习为将对象图 像数据510的特征量分解为与颜色相关的特征量和其他特征量并输出。 本实施方式中,如图8所示由已学习的β-vae的组合构成的要素分解 网络720,输出表示与形状相关的形状相关特征量、与颜色相关的颜色 相关特征量、与姿态(旋转)相关的姿态相关特征量、和与其他要素 相关的其他特征量的特征量向量作为要素分解特征量730。
68.本质特征量提取部105在要素分解特征量730中,将与获取对象 图像数据510的摄像机20c的摄影条件相应地变化的姿态相关特征量、 和其他特征量作为依赖于摄像机20c的摄影条件的非本质特征量741 丢弃,将颜色相关特征量和形状相关特征量作为独立于摄像机20c的 摄影条件的、被拍摄体固有的特征量即本质特征量740输入至数据库 比较部106。
69.返回图7的说明。数据库比较部106在步骤s306中,按每个id701 对本质特征量740与本质特征量数据库700中登记的登记特征量702 进行比较,按每个id701计算本质特征量740与登记特征量702的相似 度。数据库比较部106生成按每个id702表示这些相似度的信息作为本 质比较结果。相似度例如是欧几里得距离这样的传统的度量距离。
70.返回图4的说明。数据库比较部106基于步骤s303中生成的领域 比较结果和步骤s306中生成的本质比较结果,判断对象图像中显现的 识别对象与指定被拍摄体(追踪对
象)是否相同。用户接口101或通 信部102即输出部输出该判断结果作为识别结果(步骤s307),结束处 理。
71.具体而言,步骤s304中判断为满足了精度条件的情况下,数据库 比较部106基于领域比较结果,将用与最类似于领域共同要素530的 登记共同要素502对应的id502识别的箱包300确定为对象图像数据中 显现的识别对象。另一方面,步骤s304中判断为不满足精度条件的情 况下,数据库比较部106基于本质比较结果,将用与最类似于本质特 征量740的登记特征量702对应的id702所确定的箱包300确定为对象 图像数据中显现的识别对象。然后,数据库比较部106判断识别对象 与设定的指定被拍摄体是否相同。
72.关于判断结果的输出方法,可以举出用户接口101在输出装置156 上显示的方法,和通信部102对显示装置30输出的方法等。另外,识 别对象与指定被拍摄体相同的情况下,图像处理部103也可以对于显 现了指定被拍摄体的对象图像数据的源的图像数据,进行强调指定被 拍摄体的强调处理,将进行该强调处理后的图像数据作为判断结果输 出。
73.图9和图10是表示显示装置30中的判断结果的显示例的图。
74.图9的例子,是图像处理部103对于对象图像数据的原始图像数 据(摄像机20c获取的图像数据),进行了通过叠加包围显现了指定被 拍摄体的箱包的场所、和显现持有该指定被拍摄体的箱包的持有者的 场所的矩形31而强调指定被拍摄体的强调处理的显示例。该情况下, 监视员能够容易地确定追踪对象(指定被拍摄体)。另外,强调处理可 以用虚线所示的矩形32包围指定被拍摄体以外的箱包,用实线所示的 矩形31包围指定被拍摄体。
75.图10的例子是同时显示用包括摄像机20c的多个摄像机分别获取 的多个图像数据的显示例。在任一图像数据中,都叠加了包围显现指 定被拍摄体的箱包的场所的矩形31。
76.另外,图9所示的显示画面和图10所示的显示画面,也可以与监 视员等用户的操作相应地切换。例如,在显示装置30上设置了触摸面 板传感器的情况下,可以在触击图9所示的显示画面时,显示图10所 示的显示画面,在图10所示的显示画面中触击图像数据中的任一者时, 如图9所示地显示被触击的图像数据。
77.图11是用于说明构建数据库的构建处理的流程图。
78.构建处理中,首先,物体识别系统10的图像处理部103经由通信 部102获取用摄像机20a和20b获取的旧摄像机图像数据(步骤s501)。
79.图像处理部103确认旧摄像机图像数据中是否显现了规定被拍摄 体即箱包(步骤s502)。
80.没有显现箱包的情况下,图像处理部103结束处理。另一方面, 显现了箱包的情况下,图像处理部103从旧摄像机图像数据中提取表 示显现了箱包的区域的部分图像数据作为参考图像数据,并输出至领 域自适应部104和本质特征量提取部105(步骤s503)。
81.领域自适应部104与图4的步骤s302同样地,对于参考图像数据 执行领域自适应处理,提取向量信息即领域共同要素。另外,本质特 征量提取部105与图4的步骤s305同样地,对于参考图像数据执行本 质特征量提取处理,提取向量信息即本质特征量(步骤s504)。
82.数据库比较部106判断步骤s504中提取出的向量信息是否已登记 在数据库中(步
骤s505)。本实施方式中,判断中使用的向量信息是本 质特征量。该情况下,可以在与本质特征量的相似度(例如度量距离) 在规定值以上的登记特征量已登记在本质特征量数据库中的情况下, 判断为向量信息已登记在数据库中。另外,判断中使用的向量信息也 可以是领域共同要素,也可以是领域共同要素和本质特征量双方。
83.向量信息已登记的情况下,数据库比较部106结束处理。另一方 面,向量信息尚未登记的情况下,数据库比较部106生成与数据库中 已登记的id不重复的新id,作为识别参考图像数据中显现的参考被拍 摄体的id,将该新id、与步骤s504中提取出的领域共同要素和本质特 征量关联地登记在数据库中(步骤s506),结束处理。
84.另外,也可以不进行步骤s505的处理,而是将提取出的全部向量 信息登记在数据库中。
85.本实施方式中,假设识别对象是箱包进行了说明,但识别对象不 限于箱包。另外,本质特征量例如能够与识别对象相应地适当设定。 例如,识别对象是人的情况下,可以将本质特征量设为与衣服的颜色 相关的特征量。另外,识别对象是动物的情况下,可以将本质特征量 设为与身体的颜色相关的特征量。
86.另外,根据以上说明的本实施方式,本质特征量提取部105从基 于用摄像机20c获取的图像数据得到的对象图像数据中,提取与关于 该对象图像数据中显现的被拍摄体的多个要素分别相关的多个特征量 中的、与独立于摄像机20c的摄影条件的要素相关的特征量作为本质 特征量。数据库比较部106与从基于用与摄像机20c不同的摄像机20a 和20b获取的图像数据得到的参考图像数据中提取出的本质特征量即 登记特征量进行比较,基于其比较结果,确定被拍摄体。从而,因为 基于与独立于摄像机20c的摄影条件的要素相关的特征量确定被拍摄 体,所以能够减少收集训练数据耗费的时间和成本,同时提高识别精 度。
87.另外,本实施方式中,本质特征量是关于被拍摄体的颜色的特征 量和关于被拍摄体的形状的特征量中的至少一者。因此,能够提取适 当的特征量作为本质特征量。
88.另外,本实施方式中,数据库比较部106将对于参考图像数据中 显现的每个参考被拍摄体登记了登记特征量的本质特征量数据库中与 本质特征量的相似度最高的登记特征量对应的参考被拍摄体确定为识 别对象。因此,能够更适当地确定识别对象。
89.另外,本实施方式中,数据库比较部106在相似度最高的登记特 征量的该相似度高于规定值的情况下,将与该登记特征量对应的参考 被拍摄体确定为识别对象。因此,能够更适当地确定识别对象。
90.另外,本实施方式中,图像处理部103在识别对象与指定被拍摄 体相同的情况下,对于对象图像数据的原始图像数据进行强调显现指 定被拍摄体的区域的图像处理。用户接口101或通信部102输出进行 图像处理后的图像数据。该情况下,能够使用户容易地得知指定被拍 摄体。
91.另外,本实施方式中,数据库比较部106将从参考图像数据中提 取出的本质特征量作为登记特征量登记在本质特征量数据库中。因此, 能够实时地进行数据库的构建和更新,在识别机场内的箱包等情况下 也能够适当地确定被拍摄体。
92.另外,本实施方式中,领域自适应部104提取对象图像数据的领 域共同要素。数据库比较部106基于本质特征量的比较结果、和对领 域共同要素与从参考图像数据中提取出
的领域共同要素即登记共同要素进行比较得到的领域比较结果,确定识别对象。因此,能够更适当地确定被拍摄体。
93.另外,本实施方式中,数据库比较部106在满足关于与领域共同要素的相似度最高的登记共同要素和领域共同要素的一致率的规定精度条件的情况下,将与该相似度最高的登记共同要素对应的参考被拍摄体确定为被拍摄体,在不满足精度条件的情况下,基于本质特征量的比较结果,确定被拍摄体。因此,能够更适当地确定被拍摄体。
94.另外,本实施方式中,精度条件是与领域共同要素的相似度最高的登记共同要素的相似度高于第一阈值,且与领域共同要素的相似度其次高的登记共同要素的相似度低于比第一阈值小的第二阈值。因此,能够更适当地确定被拍摄体。
95.另外,本实施方式中,数据库比较部106将从参考图像数据中提取出的领域共同要素逐次登记在共同要素数据库中。因此,能够实时地进行共同要素数据库的构建和更新,在识别机场内的箱包等情况下也能够适当地确定识别对象。
96.上述本发明的实施方式是用于说明本发明的示例,并不将本发明的范围仅限定于这些实施方式。本行业从业者能够不脱离本发明的范围地,用其他各种方式实施本发明。
97.例如,要素的数量等(包括个数、数值、量和范围等),除了特别明确示出的情况和原理上明确限定为特定数量等情况以外,都不限定于该特定数量,也可以是特定数量以上或以下。另外,各功能的说明是一例,可以将多个功能合并为一个功能,或者将一个功能分割为多个功能。另外,现有的学习模型的类型是任意的,例如是深度学习模型。
98.附图标记说明
99.10:物体识别系统20:摄像机30:显示装置101:用户接口102:通信部103:图像处理部104:领域自适应部105:本质特征量提取部106:数据库比较部107:模型学习部108:推算部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1